1
Изобретение относится к копй рующим манипуляторам.
Известны манипуляторы, звенья которых снабжены следящим приводом. Для уравновешивания задающих органоь этих манипуляторов применяется системы противовесов. Такие манипуляторы конструктивно сложны.
Цель изобретения - упрощение конструкции системы уравновешивания задающих органов манипулятора. Это достигается тем, что рукоятка управления манипулятором снабжена дополнительным механизмом, геометрически и кинематически подобным задающему органу. Звенья этого механизма кинематически связаны с соответствующшАи звеньями задающего органа. Массы звеньев дополнительного механизма подобраны так, что приведенный момент от веса этих звеньев приблизительно равен приведенному моменту от веса звеньев задающего органа. В результате при Ж)бои положении звеньев зaдaющeгQJ
органа они уравновеше-ны звеньями дополнительного механизма.
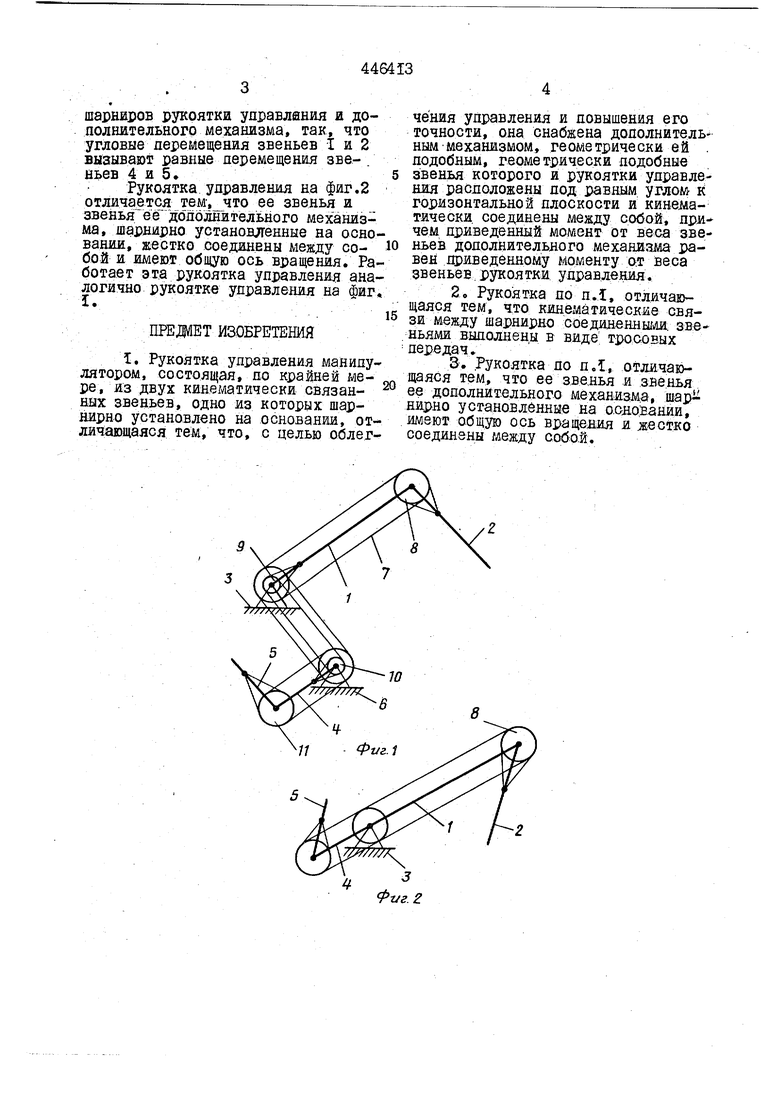
На фиг.1 и 2 схематично изображены варианты предлагаемой рукоятки управления ( задающие датчики угловых перемещений не показаны) .
Рукоятка управления (см.фиг. I) состоит из двух кинематически связанных звеньев I и 2, одно из которых установлена на основании . 8, и кинематически связана с дополнительным механизмом, состоящим также из двух звеньев 4 и 5, одно из которых установлено на основании 6, с помощью гибких связей, к примеру троса 7, и блоков 8-II, При изменении положения звена I или 2 изменяется угол намотки трона блоки 8 и 9. Это изменение с помощыо троса передается на блоки 10 и II дополнительного механизма.
Трос наматывается на блоки, установленные на осях подобных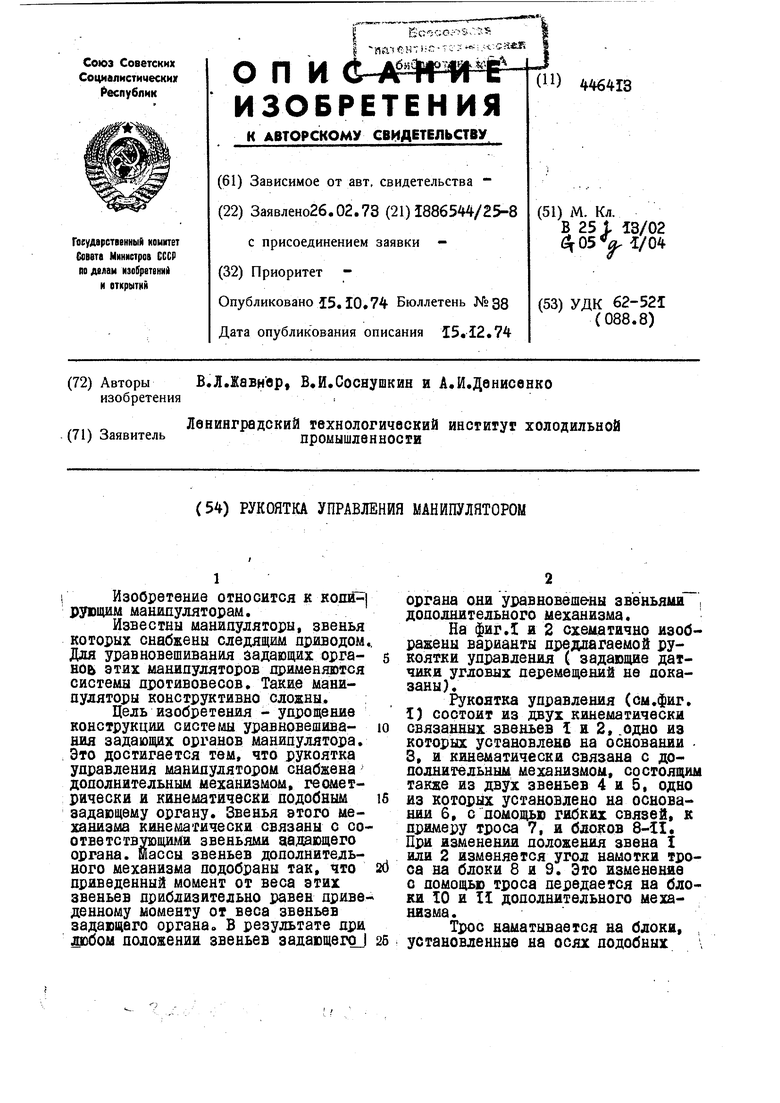
| название | год | авторы | номер документа |
|---|---|---|---|
| Задающий орган манипулятора | 1976 |
|
SU564150A1 |
| Манипулятор | 1982 |
|
SU1114549A1 |
| Манипулятор | 1982 |
|
SU1115899A1 |
| Промышленный робот | 1980 |
|
SU931463A1 |
| Манипулятор | 1981 |
|
SU971645A2 |
| Копирующий манипулятор | 1978 |
|
SU722754A1 |
| Уравновешенный манипулятор | 1988 |
|
SU1567370A1 |
| Манипулятор | 1975 |
|
SU656826A2 |
| СИСТЕМА КОНТРОЛЯ ТЯГИ | 2017 |
|
RU2688081C1 |
| Задающий орган манипулятора | 1979 |
|
SU895639A1 |
