1
Изобретение касается систем автоматического регулирования и может быть применено при разработке следящих приводов с повышенной плавностью работы и точностью отработки скорости, например в приводах наведения и ведения телескопов и радиотелескопов.
Известен двухдвигательный следяахий привод, содержапдий первый сумматор, выход которого через первый усилитель подключен ко входу первого исполнительного двигателя, а вход - к выходу первого датчика обратной связи, второй сумматор, выход которого через второй усилитель подсоединен ко входу второго исполнительного двигателя, а вход - к выходу второго датчика обратной связи, задающее устройство, один из выходов которого связан со входом первого сумматора, а другой выход через третий сумматор - со входом порогового устройства, датчик угла, выход которого соединен со входом третьего сумматора, при этом вал первого двигателя кинематически связан с первым входом дифференциала и валом первого датчика обратной связи, вал второго двигателя - со вторым входом дифференциала и валом второго датчика обратной связи, а выходной вал дифференциала - с валом датчика угла.
Предлагаемый привод отличается от известного тем, что он содержит ключ, вход которого подсоединен к выходу первого сумматора, выход - ко входу второго сумматора, а управляющий вход - к выходу порогового устройства.
Это позволяет повысить плавность и точность работы по скорости при сохранении заданной точности по углу.
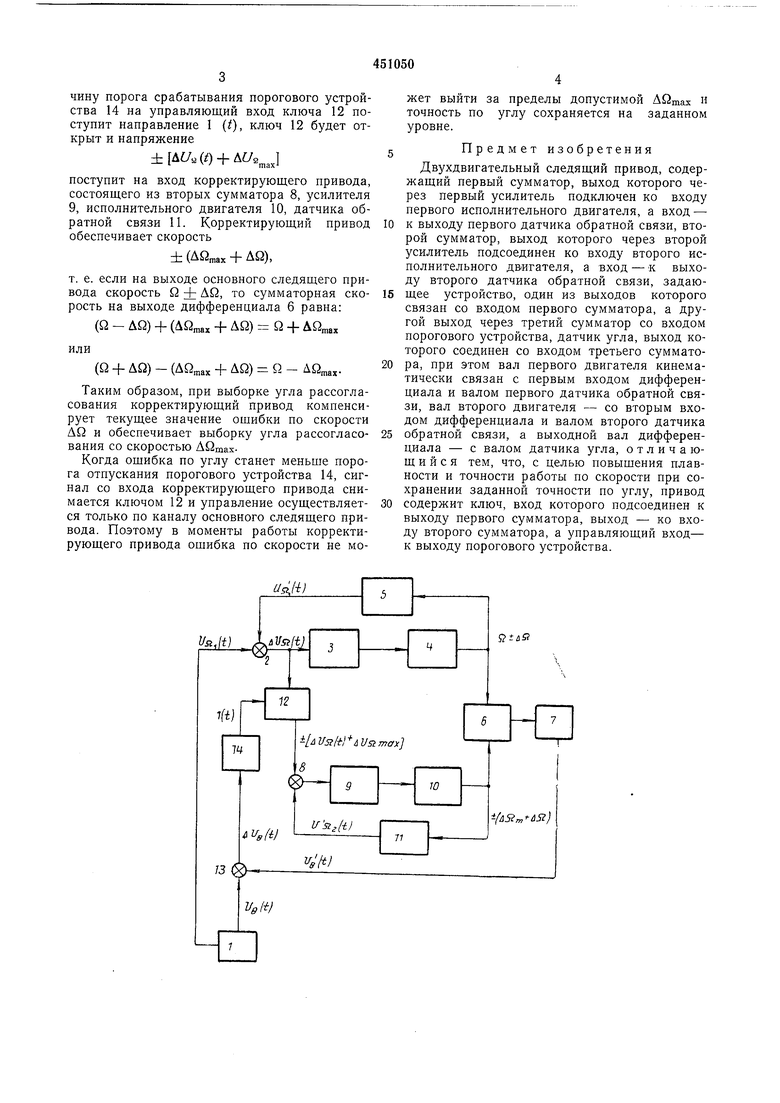
На чертеже дана блок-схема предлагаемого двухдвигательного следящего привода.
Привод содержит задатчик входных сигналов 1, первый сумматор 2, первый усилитель 3, первый исполнительный двигатель 4, первый датчик обратной связи 5, дифференциал 6, датчик угла 7, второй сумматор 8, второй
усилитель 9, второй исполнительный двигатель 10, второй датчик обратной связи 11, ключ 12, третий сумматор 13, пороговое устройство 14. Датчики обратной связи 5 и 11 обеспечивают охват приводов местными обратными связями по скорости.
Двухдвигательный следящий привод работает следящим образом. При достаточно малой ошибки по углу U(i(t), не превосходящей заданный предел, система управляется
сигналом по скорости UQ (t) по каналу основного следящего привода, состоящего из первых сумматора 2, исполнительного двигателя 4, усилителя 3 и датчика обратной связи 5. При этом накапливаются ошибки по углу. Когда величина ошибки превысит вели
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1976 |
|
SU652529A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Трехканальная следящая система | 1989 |
|
SU1716479A1 |
| Двухканальный следящий привод | 1975 |
|
SU549781A1 |
| Следящая система | 1980 |
|
SU885970A1 |
| Следящая система с компенсацией лифта механической передачи | 1976 |
|
SU620940A1 |
| Устройство для управления антенной корабельной радиолокационной станции по курсовому углу | 1974 |
|
SU1841193A1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| Двухканальная следящая система | 1973 |
|
SU446027A1 |
| Следящий рулевой электропривод | 2022 |
|
RU2800527C1 |
