многожелобчатых гравитационных
стеллажей 4.
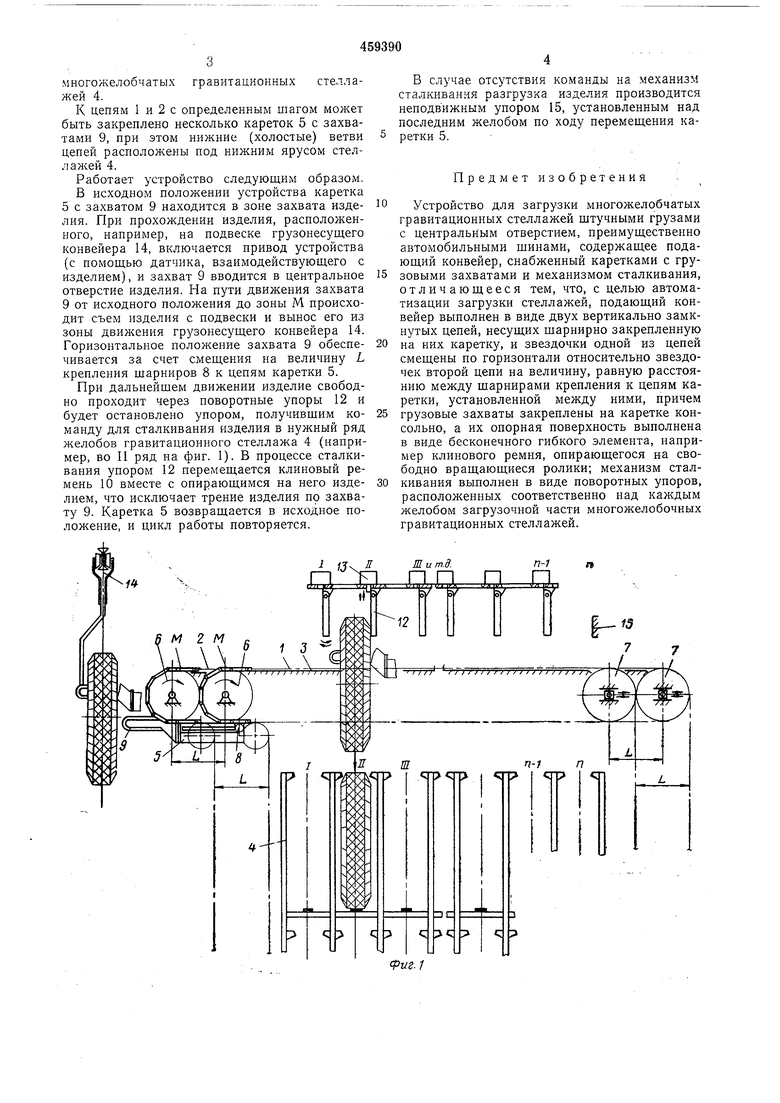
К цепям 1 и 2 с определенным шагом может быть закреплено несколько кареток 5 с захватами 9, при этом нижние (холостые) ветви цепей располол ены под нижним ярусом стеллалсей 4.
Работает устройство следующим образом.
В исходном положении устройства каретка 5 с захватом 9 находится в зоне захвата изделия. При прохождении изделия, расположенного, например, на подвеске грузонесущего конвейера 14, включается привод устройства (с помощью датчика, взаимодействующего с изделием), и захват 9 вводится в центральное отверстие изделия. На пути движения захвата 9 от исходного положения до зоны М происходит съем изделия с подвески и вынос его из зоны движения грузонесущего конвейера 14. Горизонтальное положение захвата 9 обеспечивается за счет смещения на величину L крепления щарниров 8 к цепям каретки 5.
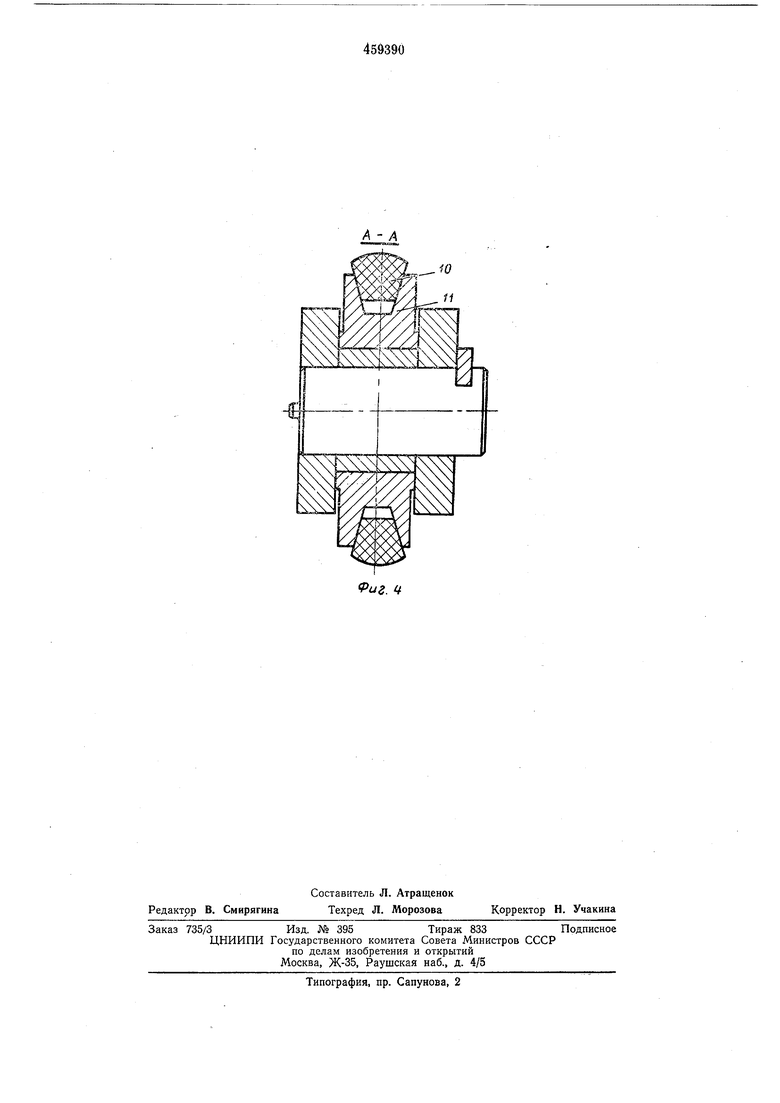
При дальнейшем движении изделие свободно проходит через поворотные упоры 12 и будет остановлено упором, получившим команду для сталкивания изделия в нужный ряд желобов гравитационного стеллажа 4 (например, во И ряд на фиг. 1). В процессе сталкивания упором 12 перемещается клиновый ремень 10 вместе с опирающимся на него изделием, что исключает трение изделия по захвату 9. Каретка 5 возвращается в исходное положение, и цикл работы повторяется. 1 fj. IШит.д. О .. .Q..Q .П
В случае отсутствия команды на механизм сталкивания разгрузка изделия производится неподвижным упором 15, установленным над последним желобом по ходу перемещения каретки 5.
Предмет изобретения
Устройство для загрузки многожелобчатых гравитационных стеллажей штучными грузами с центральным отверстием, преимущественно автомобильными шинами, содержащее подающий конвейер, снабженный каретками с грузовыми захватами и механизмом сталкивания, отличающееся тем, что, с целью автоматизации загрузки стеллажей, подающий конвейер выполнен в виде двух вертикально замкнутых цепей, несущих щарнирно закрепленную
на них каретку, и звездочки одной из цепей смещены по горизонтали относительно звездочек второй цепи на величину, равную расстоянию между щарнирами крепления к цепям каретки, установленной между ними, причем
грузовые захваты закреплены на каретке консольно, а их опорная поверхность выполнена в виде бесконечного гибкого элемента, например клинового ремня, опирающегося на свободно вращающиеся ролики; механизм сталкивания выполнен в виде поворотных упоров, расположенных соответственно над каждым желобом загрузочной части многожелобочных гравитационных стеллажей. 7 «ТРЯТ 7
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для пакетирования по-КРышЕК пНЕВМАТичЕСКиХ шиН | 1979 |
|
SU816775A1 |
| Устройство для загрузки гравитационного многоярусного стеллажа цилиндрическими изделиями | 1989 |
|
SU1654153A1 |
| Устройство для автоматической навески изделий | 1972 |
|
SU601208A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| УСТРОЙСТВО ДЛЯ РАЗГРУЗКИ ГРАВИТАЦИОННЫ?СТЕЛЛАЖЕЙ^^..v-.-^jIJ П г ЬФ1Д ШШпЕГш! | 1970 |
|
SU435995A1 |
| Склад для хранения цилиндрических изделий | 1982 |
|
SU1036628A1 |
| Устройство для дозированной подачи заготовок | 1985 |
|
SU1284909A1 |
| Межоперационный склад цилиндричес-КиХ издЕлий | 1979 |
|
SU821327A1 |
| Сборочная ячейка гибкой сборочной спутниковой линии | 1984 |
|
SU1342694A1 |
| Перегрузочное устройство подвесного конвейера | 1982 |
|
SU1085909A1 |
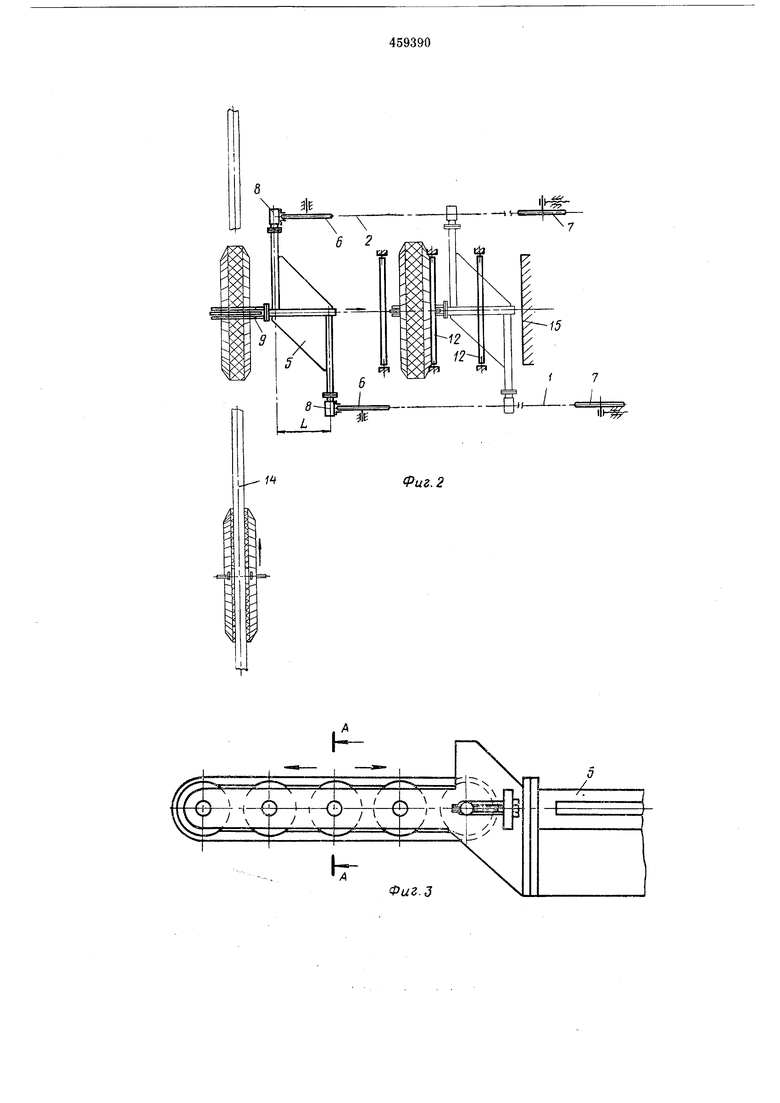
Фиг.з
W
Риг. 14
