(54) МОТОИНСТРУМЕНТ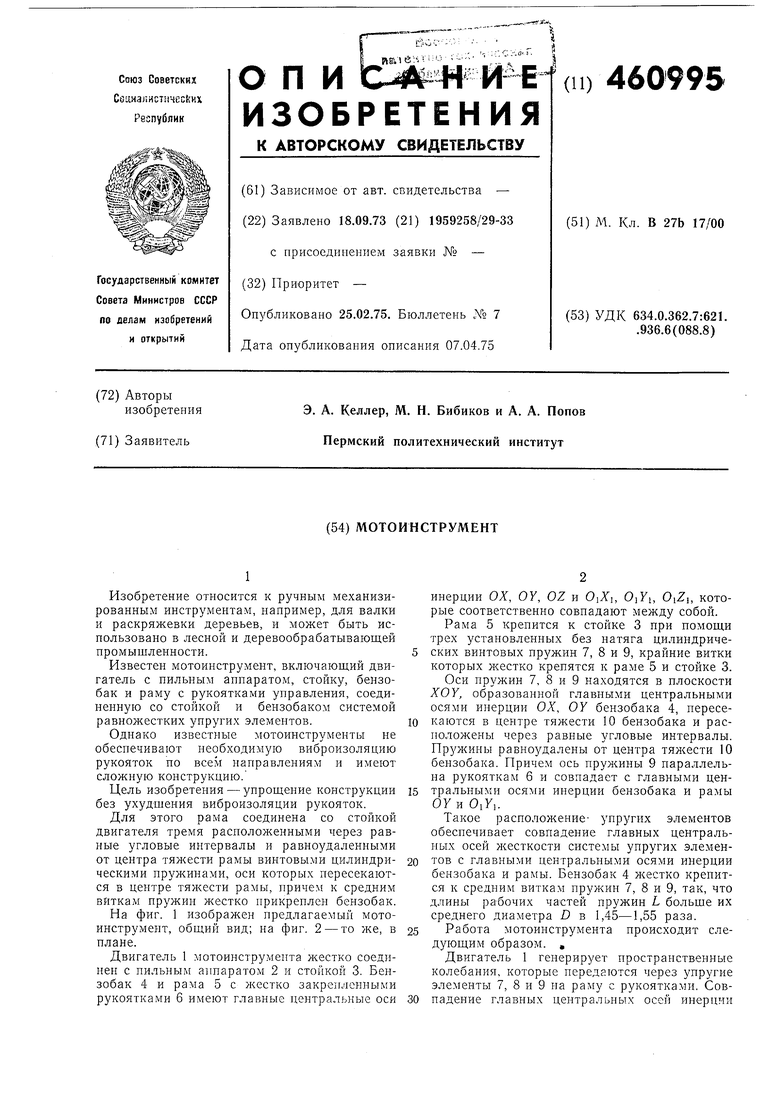
| название | год | авторы | номер документа |
|---|---|---|---|
| Переносная моторная пила | 1977 |
|
SU642157A1 |
| Механизированный инструмент | 1973 |
|
SU451520A1 |
| Переносная моторная пила | 1975 |
|
SU541665A1 |
| Переносная моторная пила | 1974 |
|
SU480543A1 |
| Переносная моторная пила | 1980 |
|
SU939187A1 |
| Переносная моторная пила | 1973 |
|
SU447249A1 |
| Переносная моторная пила | 1976 |
|
SU648401A1 |
| Переносная моторная пила | 1986 |
|
SU1359114A1 |
| Переносная моторная пила | 1980 |
|
SU885012A1 |
| Переносная моторная пила | 1977 |
|
SU666078A1 |
1
Изобретение относится к ручным механизированным инструментам, например, для валки и раскряжевки деревьев, и может быть использовано в лесной и деревообрабатывающей промышленности.
Известен мотоинструмент, включающий двигатель с пильным аннаратом, стойку, бензобак и раму с рукоятками управления, соединенную со стойкой и бензобаком системой равножестких упругих элементов.
Однако известные мотоинструменты не обеспечивают необходимую виброизоляцию рукояток по всем направлениям и имеют сложную конструкцию.
Цель изобретения - упрощение конструкции без ухудшения виброизоляции рукояток.
Для этого рама соединена со стойкой двигателя тремя расположенными через равные угловые интервалы и равноудаленными от центра тяжести рамы винтовыми цилиндрическими пружинами, оси которых пересекаются в центре тяжести рамы, причем к средним виткам пружин жестко прикреплен бензобак.
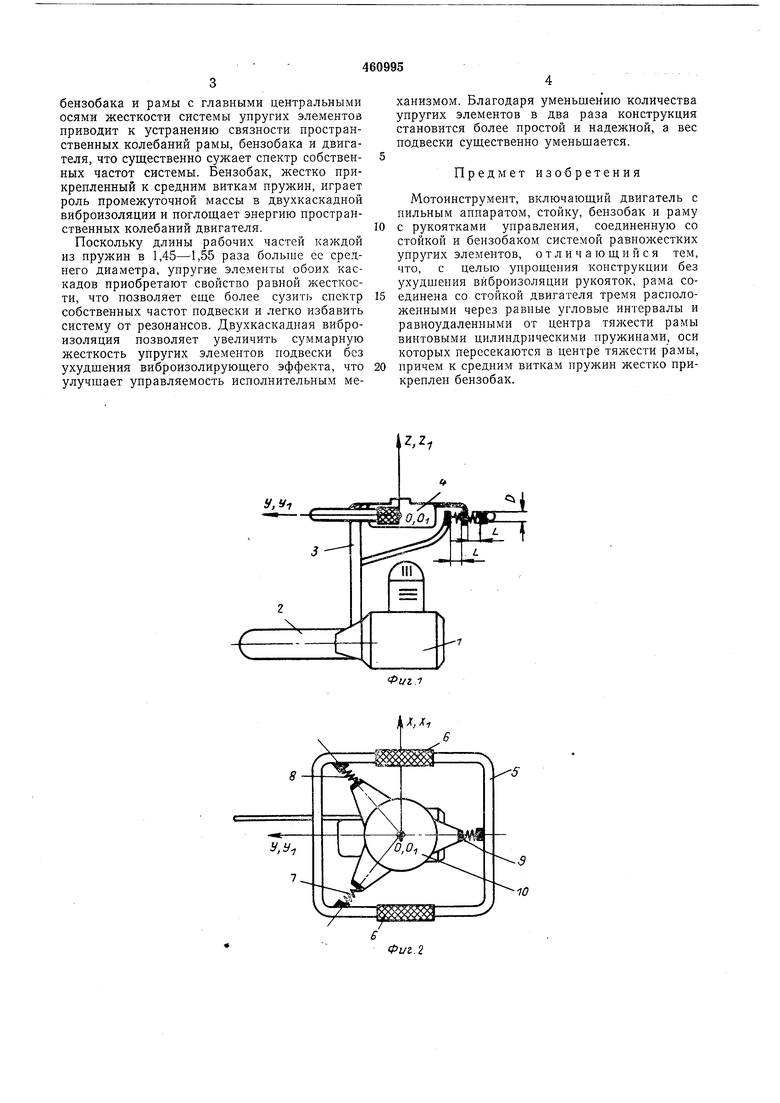
На фиг. 1 изображен предлагаемый мотоинструмеит, общий вид; на фиг. 2 - то же, в плане.
Двигатель 1 мотоинструмента жестко соединен с пильным аппаратом 2 и стойкой 3. Бензобак 4 и рама 5 с жестко закрепленными рукоятками 6 имеют главные центральные оси
инерции ОХ, OY, OZ и OiXi, OiFi, OiZ,, которые соответственно совпадают между собой.
Рама 5 крепится к стойке 3 при помощи трех установленных без натяга цилиндрических винтовых пружин 7, 8 и 9, крайние витки которых жестко крепятся к раме 5 и стойке 3.
Оси пружин 7, 8 и 9 находятся в плоскости XOY, образованной главными центральными осями инерции ОХ, OY бензобака 4, пересекаются в центре тяжести 10 бензобака и располол ены через равные угловые интервалы. Пружины равноудалены от центра тяжести 10 бензобака. Причем ось пружины 9 параллельна рукояткам 6 и совпадает с главными центральными осями инерции бензобака и рамы ОУ и Oiy,.
Такое расположение- упругих элементов обеспечивает совпадение главных центральных осей жесткости системы упругих элементов с главными центральными осями инерции бензобака и рамы. Бензобак 4 жестко кренится к средним виткам пружин 7, 8 и 9, так, что длины рабочих частей пружин L больще их среднего диаметра D в 1,45-1,55 раза.
Работа мотоинструмента происходит следующим образом. ,
Двигатель 1 генерирует прострапствеиные колебания, которые передаются через упругие элементы 7, 8 и 9 па раму с рукоятками. Совпадение главных центральных осей инерции
