(54) ПЕРЕНОСНАЯ МОТОРНАЯ ПИЛА
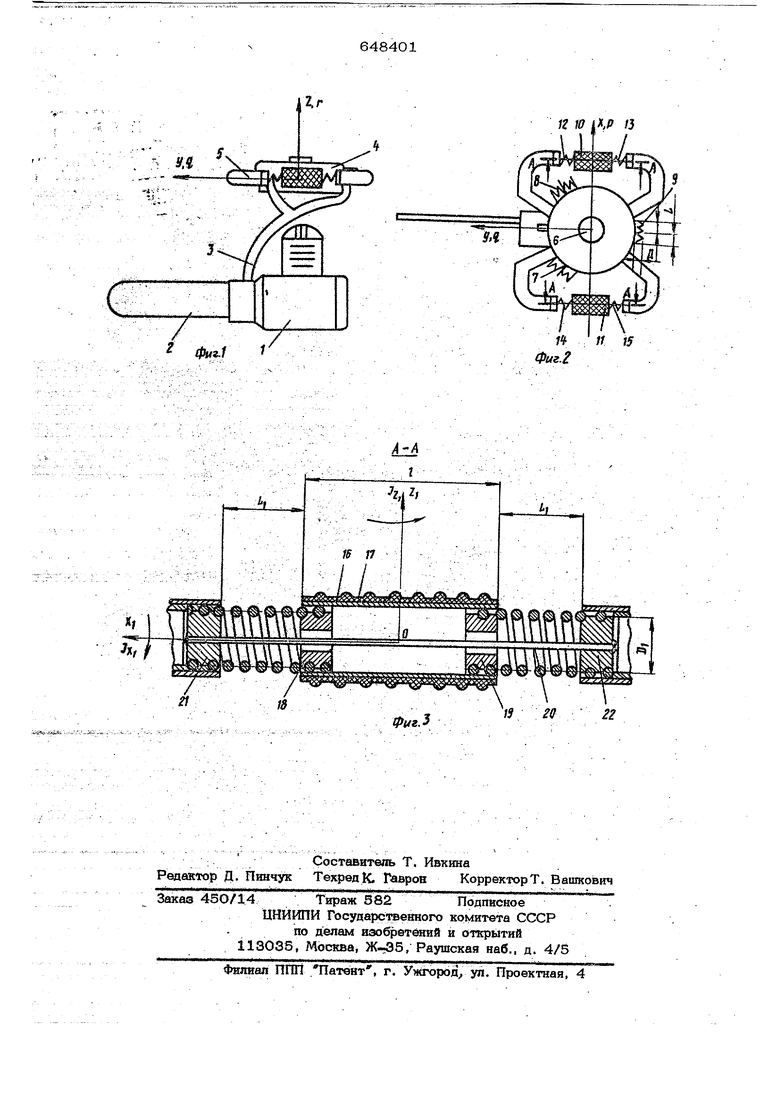
ти, цеито которой совпадает с центром Чгяжести 6 рамы, причем центр жесткости бйного из упругих элементов, наприм элемента 9, расположен на оси У опорной рамы. Равная жесткость упругих элементов 7. 8. 9 достигается их вьтолнением в врще установленных без натяга цилиндрических винтовых пружин концевые витки которых жестко закреплены в проушинах рамы 5, а средние в проуш1шах стойки 3, а отношение длины рабочих участков пружин Ь к среднему диаметру 1) выполнено равным 1,45 - 1,55. Рукоятки 10, 11 соединё1 ы с опорной рамой 5 упругими элементами 12, 13, 14, 15, выполненными в виде установленных без натяга цилиндрических винтовых пружин с жестко закрепленными концевыми витками, длины рабочих частей которых L j в 1,45 - 1,55 раза больше среднего диаметраD.3, . Каждая рукоятка управления 1О, 11 выполнена в виде полого тонкостенного цилиндра 16, например, алюминиевой трубы, покрытой полимер- libiMH материалом 17, например, резиной. По торцам цилиндра жестко закреплены ограничительные втулки 18, 19, изготовленные из материала большей плотности, чем тонкостенный цилиндр, например, из стали, В осевых отверстиях втулок помещен ограничительный тросик 2О, жестко закрепленный концами в пробках 21, 22 крепления концевых витков пружин в проушина опорной рамы 5. Каждая руютятка выполняется так, что произведение длины рукоятки Е на отношение радиусов инерции рукоятки относительно продольной р X и поперечной р осей равно 1,13-1,17 среднего диаметра пружины DI .
Переносная моторная пила работает следующим образом.
Двигатель 1 генерирует пространст венные колебания, которые передаются через упругие элементы 7, 8, 9 на опоную раму 5 и затем через упругие элементы 12, 13, 14, 15 на рукоятки управления 10, 11. Совпадение главных центральных осей инерции рамы 5 с главными центральными осями жесткости системы упругих элементов 7, 8, 9 и вьтолнение их равножесткими сужает спектр и устраняет связанность собственных частот опорной рамы на подвеске, что улучшает виброизоляцию рамы. Упругая подвеска рукояток 1О,
11 на элементах 12, 13, 14, 15 приводит к двухкаскадной пространственной виброизоляции каждой из них, что позволяет повысить виброизогафующий
эффект упругой подвески по всем направлениям без снижения управляемости: пильным аппаратом. Выполнение каж дои рукоятки ПС указанным выше соотношениям между ее размерами и
размерами пружин 12, 13 и 14, 15 приводит к равенству всех частот линейных и угловых колебаний каждой рукоятки на подвеске, что сужает .спектр каждой рукоятки до одной частоты. Система двухкаскадной подвески рукояток будет иметь всего пять собственных частот: три частоты угловых и одну частоту линейных колебаний опорной рамы на упругих элементах (низкочастотная область спектра) и одну
частоту колебаний рукояток относительно рамы (высокочастотная область спектра). Поэтому двухкаскадная подвеска предлагаемой конструкции раз™ двигает спектр собственных частот, практически не расширяя область низкочастотного спектра.. Это позволяет получить удовлетворительную отстройку собственных частот рамы с рукоятками от частот возбуждения как на режимах рабочего хода, так и холостого хода. Соотношения, необходимые для одНочастотной подвески каждой рукоятки, получены на основании следую- ших соображений. Вследствие совпадения главных центральных осей инерции рУкоятки с главными центральными осями жесткости ее подвески система имеет три различные несвязанные собственные частоты:.
а) линейных колебаний вдоль осей, л . , У , 21.
2К
...(i),
m
где К - коэффициент линейной жесткости одной из рабочих частей пружины; m - приведенная масса рукоятки; б) угловых колебаний вокруг оси ОХ,
12);
А
W,
в) угловых колебаний вокруг осей
02., OYj
...ts),
л л СО СО|
где RX, R Ry - коэффициент крутильных жесткостей подвески рукоятки относительно осей X , У , 2i j ;
/х 7 PZ PtiP РЗДИУСЫ инерции рукоятки относительно осей Xi.Xj, YI .
Коэффициенты крутильных и линейных жесткостей подвески рукоятки равны:
|4
2ЕсЗ
...(4). ...(5), ...(6),
где Е - модуль продольной упругости
пруж1шной стали, кг/мм ;
Q - модуль сдвига пружинной стали, кг/мм ;
d - диаметр проволоки, мм;
T3j- средний диаметр навивки, мм;
1 - число рабочих витков одной из рабочих частей пружины; t - длина рукоятки, мм.
Для осуществления одночастотной подвески необходимо получить равенство линейных и углбвых собственных частот системы
Ы СОу «2 .-Сг).
Представляя выражение (1) - (6) в (7) получаем
21
2c,d
8-D.r. m
64Dj.i.ni -px
...(8).
SD.i-Smp
Известно (Биргер И. A. и др. Расчет на прочность деталей машин. Справочное пособие, М., стр. 86, 1966), Ч1Х) отношение величины модуля про-
648401
дольной упругости к модулю сдвига для пружинных сталей равно
-.(9).
,65±0,1
Учитьгеая выражение (9) после преобразования вьфажения (8) получаем необходимые соотношения
я4
... (10)
10 /3; (0,565-p.585)D, ч.. (И)
или
Рх
8-y {i.i3-i.l7)r, ...(12).
Рукоятка, размеры которой связаны с диаметром пружины ее подвески соотношением (12), имеет только оДну частоту собственных колебаний и при расчете высокочастотных составляющихспектра достаточно определить,. например, только частоту собственных линейных колебаний по уравненто (1) и отстроить систему от резонанса на этой частоте. Эффективность внбройзо ляции для остальных собственных частот обеспечивается автоматически. Это особо важно в случае воздействия со стороны основания пространственных колебаний широкого спектра.
Преимуществом предлагаемого устройства яв ляется также его надежность, поскольку при поломке гфужины рукоятки получают незначительное перемещение, упираясь ограничительными втулками 18, 19 в ограничительный тросик2О.
Формула изобретения
Переносная моторная пила, включак щая двигатель, пильный аппарат, бензобак,опорную раму н полые рукоятки управления, связанные с опорной рамой при помощи пружины, отличающаяся тем, что, с целью повышения виброизоляции рукояток управления на режимах рабочего и холостого хода, каждая из рукЬяток управления вьшолнена Б виде цилиндра, ось которого совпадает с продольной осью пружин.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
№ 447249,.кп. В 27 В 17/ОО, 1973.
2.Патент США № 3620269, кл. 143-32, 1971.
if.i
/г 10 i.p /j
7
фиг.1 1
If It W Фиг2


| название | год | авторы | номер документа |
|---|---|---|---|
| Переносная моторная пила | 1982 |
|
SU1027029A2 |
| Переносная моторная пила | 1977 |
|
SU642157A1 |
| Переносная моторная пила | 1975 |
|
SU541665A1 |
| Переносная моторная пила | 1977 |
|
SU666078A1 |
| Механизированный инструмент | 1973 |
|
SU451520A1 |
| Переносная моторная пила | 1978 |
|
SU686869A2 |
| Переносная моторная пила | 1980 |
|
SU939187A1 |
| Переносная моторная пила | 1986 |
|
SU1359114A1 |
| Переносная моторная пила | 1974 |
|
SU480543A1 |
| Переносная моторная пила | 1973 |
|
SU447249A1 |
f9 20 Фиг.З 2г
