(54) СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ РУКАВАМИ ПЕСКОМЕТА
пружины Невелико и рукоятку можно без больших усилий повернуть в любую сторону.
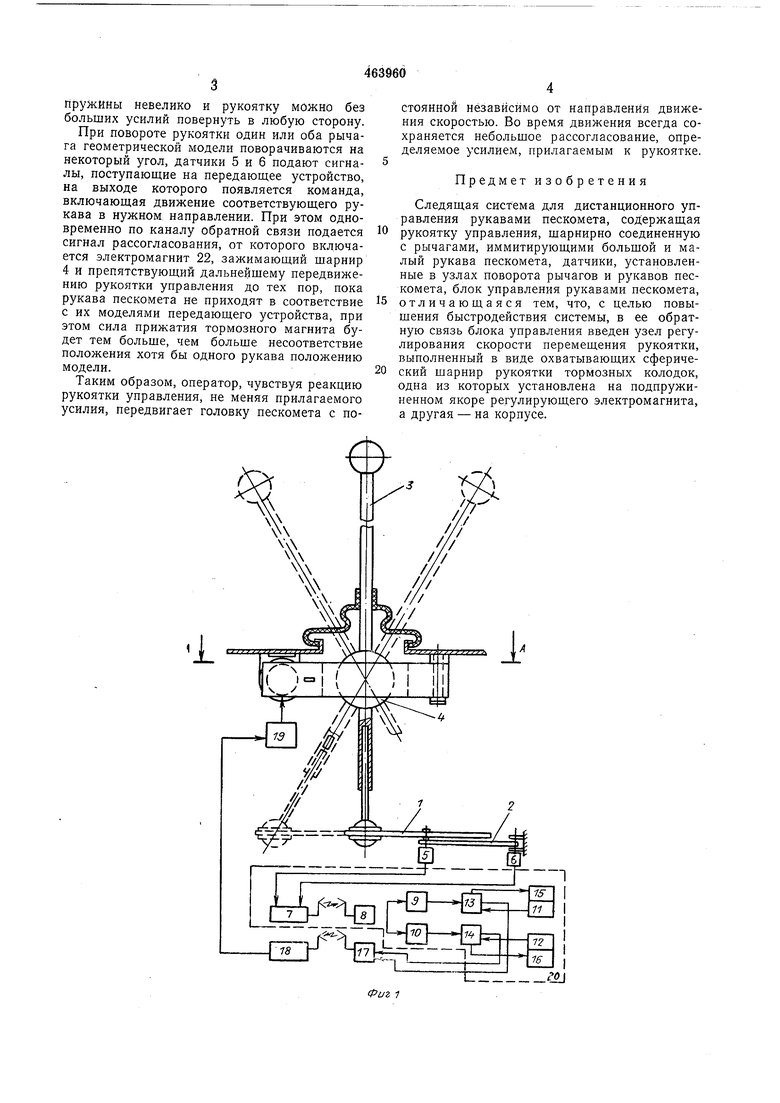
При повороте рукоятки один или оба рычага геометрической модели поворачиваются на некоторый угол, датчики 5 и 6 подают сигналы, поступающие на передающее устройство, на выходе которого появляется команда, включающая движение соответствующего рукава в нужном направлении. При этом одновременно по каналу обратной связи подается сигнал рассогласования, от которого включается электромагнит 22, зажимающий щарнир 4 и препятствующий дальнейщему передвижению рукоятки управления до тех пор, пока рукава пескомета не приходят в соответствие с их моделями передающего устройства, при этом сила прижатия тормозного магнита будет тем больще, чем больще несоответствие положения хотя бы одного рукава положению модели.
Таким образом, оператор, чувствуя реакцию рукоятки управления, не меняя прилагаемого усилия, передвигает головку пескомета с постоянной независимо от направления движения скоростью. Во время движения всегда сохраняется небольщое рассогласование, определяемое усилием, прилагаемым к рукоятке.
Предмет изобретения
Следящая система для дистанционного управления рукавами пескомета, содержащая рукоятку управления, щарнирно соединенную с рычагами, иммитирующими больщой и малый рукава пескомета, датчики, установленные в узлах поворота рычагов и рукавов пескомета, блок управления рукавами пескомета, отличающаяся тем, что, с целью повыщения быстродействия системы, в ее обратную связь блока управления введен узел регулирования скорости перемещения рукоятки, выполненный в виде охватывающих сферический шарнир рукоятки тормозных колодок, одна из которых установлена на подпружиненном якоре регулирующего электромагнита, а другая - на корпусе.
//
22//Х//Х//ХХ/х Х/ХХХ
21
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ГОЛОВКОЙ ПЕСКОМЕТА | 1969 |
|
SU242781A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2012 |
|
RU2517396C1 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| Ведущий манипулятор роботохирургического комплекса | 2022 |
|
RU2803231C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД | 2003 |
|
RU2256106C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2022 |
|
RU2788226C1 |
| УСТРОЙСТВО ПРИЛОЖЕНИЯ УСИЛИЯ ДЛЯ РУЧКИ УПРАВЛЕНИЯ В СИТУАЦИИ ОТСУТСТВИЯ ТОКА | 2020 |
|
RU2775909C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2023 |
|
RU2808302C1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ С ПОМОЩЬЮ ДВУХ РЫЧАГОВ УПРАВЛЕНИЯ ОТ ОПЕРАТОРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2025411C1 |
| Устройство ввода команд для системы управления экскаватором | 2023 |
|
RU2809499C1 |

