Изобретение относится к грузозахватным устройствам, в частности к стропам обыкновенным и полуавтоматическим, а также к захватам, применяемым при подъеме грузов.
Известны грузозахватные устройства, содержащие скобу, соединенную с полиспастом грузоподъемного механизма гибкой связью и снабженную шарнирно прикрепленными захватными лапами -с механизмом фиксации положения при чередовании операций захвата и освобождения груза.
Однако эти устройства не обеспечивают автоматического захвата и расстроповки груза.
Целью изобретения является обеспечение автоматического захвата и расстроповки груза.
Д,лй этого на оси шарнира каждой захватной лапы поворотно смонтирован контргруз, а механизм фиксации положения лапы выполйеМ в виде подпружиненного рычага, шарнирНо прикрепленного к скобе, одним концом соединенного с гибкой связью, а другим - взаимодействующего с контргрузом.
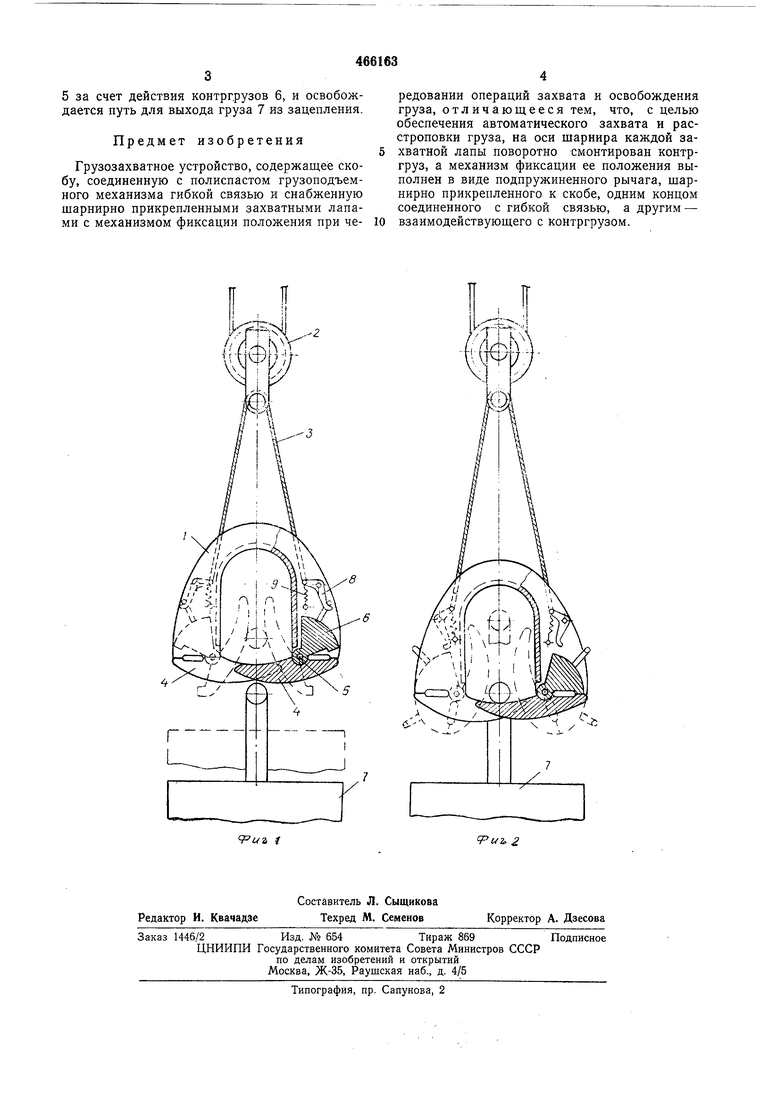
На фиг. 1 показано взаимное расположение звеньев захватного устройства в момент захвата груза; на фиг. 2 - устройство с подвещенньга на него грузом и взаимное расположение звеньев в момент съема груза.
Грузозахватное устройство включает скобу 1, соединенную с полиспастом 2 грузоподъемного механизма гибкой связью 3 и снабженную шарнирно прикрепленными захватными ланами 4. На оси 5 шарнира каждой захватной лапы 4 поворотно смонтирован контргруз 6. Механизм фиксации положения захватных лап 4 при чередовании операций захвата и освобождения груза 7 выполнен в виде подпружиненного рычага 8, шарнирно прикрепленного к скобе 1, одним концом соеднненного с гибкой связью 3, а другим взаимодействующего с контргрузом 6.
Устройство работает следующим образом. Без груза 7 благодаря упругости пружин 9 контргрузы 6 находятся в приподнятом состоянии, а захватные лапы 4 за счет расположения центра тяжести ближе к оси симметрии от шарниров 5 находятся в горизонтальном положении. Нри наводке устройства па груз 7 за хватные лапы 4 поднимаются, груз 7 проходит
между ними и при вььходе из соприкосновения с захватными лапами 4 последние падают и замыкают груз 7. При натяжении гибкой связи 3 устройство с грузом поднимается, а рычаги 9 поворачиваются, освобождая контргрузы
6, последние падают на захватные лапы 4, создавая поворачивающий момент.
После установки груза 7 на требуемое место нагрузка с устройства снимается, захватные лапы 4 поворачиваются вокруг шарниро«
5 за счет действия контргрузов 6, и освобождается путь для выхода груза 7 из зацепления.
Предмет изобретения
Грузозахватное устройство, содержащее скобу, соединенную с полиспастом грузоподъемного механизма гибкой связью и снабженную шарнирно прикрепленными захватными лапами с механизмом фиксации положения при чередовании операций захвата и освобождения груза, отличающееся тем, что, с целью обеспечения автоматического захвата и расстроповки груза, на оси шарнира каждой захватной лапы поворотно смонтирован контргруз, а механизм фиксации ее положения выполнен в виде подпружиненного рычага, щарнирно прикрепленного к скобе, одним концом соединенного с гибкой связью, а другим - взаимодействующего с контргрузом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1981 |
|
SU1031870A1 |
| Захватное устройство для полых изделий | 1980 |
|
SU895889A1 |
| Грузозахватное устройство | 1980 |
|
SU912623A1 |
| Самоотцепляющееся захватное устройство | 1980 |
|
SU945050A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Грузозахватное устройство для монтажа строительных конструкций | 1974 |
|
SU557034A1 |
| Автоматический клещевой захват | 1980 |
|
SU925838A1 |
| Самоотцепляющееся захватное устройство | 1981 |
|
SU1017641A1 |
| Грузозахватная траверса | 1978 |
|
SU765186A1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
