(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ БЕТОНОВОЗНОЙ ТЕЛЕЖКОЙ
8ПТБ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного упРАВлЕНия ТРАНСпОРТНыМ МЕХАНизМОМ | 1978 |
|
SU813375A1 |
| Устройство для управления автома-ТичЕСКиМи лиНияМи | 1979 |
|
SU840804A1 |
| Устройство управления сортировкой изделий | 1986 |
|
SU1388111A1 |
| Устройство для программного управления транспортным механизмом | 1983 |
|
SU1087959A1 |
| Устройство для программного управления и контроля хода шахтной подъемной машины | 1985 |
|
SU1299932A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯШТАБЕЛЕРОМ | 1969 |
|
SU257577A1 |
| Устройство передачи информации между локомотивом и стационарным постом | 1986 |
|
SU1316895A1 |
| Устройство для дистанционного задания маневровых маршрутов с локомотива | 1984 |
|
SU1235780A1 |
| Устройство для автоматической переездной сигнализации | 1980 |
|
SU927611A1 |
| Система управления загрузкой бункеров сыпучим и волокнистым материалом | 1986 |
|
SU1361512A1 |
Изобретение относится к схемам управления тележками для перевозки бетонорастворных смесей на заводах стройиндустрии.
Известно устройство управления бетоновозной тележкой, содержащее блок управления приводом передвижения, блок управления приводом затвора, блок управления вибратором и узел блокировки, служащий для раздельного управления приводами. Узел блокировки предназначен для раздельного и последовательного управления механизмами тележки и осуществляется ряд необходимых блокировок, например аварийную остановку тележки в концах рельсового пути, исключает возможность передвижения тележки с открытым затвором и т. л. При использовании известного устройства стационарный пульт оператора связан гибким сигнальным кабелем с приводами механизмов тележ ки для передачи команд управления и контроля их исполнения. Электропитание приводов тележки осуществляется по отдельному силовому кабелю или троллеями.
Однако известное устройство ненадежно при работе в интенсивном режиме выдачи бетонной смеси из-за наличия проводной связи между тележкой и пультом оператора. Гибкий сигнальный кабель, предназначенный для этой
связи, насчитывает 16 и более жил, а срок эксплуатации его невелик вследствие частого обрыва жил от многократных перегибов кабеля при передвижении тележки. Иногда эти
обрывы сопровождаются замыканиями между другими жилами, что приводит к ложным срабатываниям механизмов тележки и, в конечном счете, к аварии. Цель изобретения - повыщение надежности
работы устройства и исключение ложных срабатываний.
Для этого узел блокировки устройства для управления тележкой содержит блок задания программы, щифратор, дешифратор управляющих команд, датчик путевой инфор|Мации и элемент временной задержки, причем один вход дещифратора соединен через щифратор с выходом блока задания программы, другой вход дещифратора подключен к датчику путевой информации, а выходы дещифратора соединены с блоком управления приводом передвижения и блоком управления приводом затвора, который, в свою очередь, связан с блоком управления приводом передвижения и
блоком управления вибратором, при этом выход блока управления вибратором через элемент временной задержки подключен ко входу блока управления приводом затвор
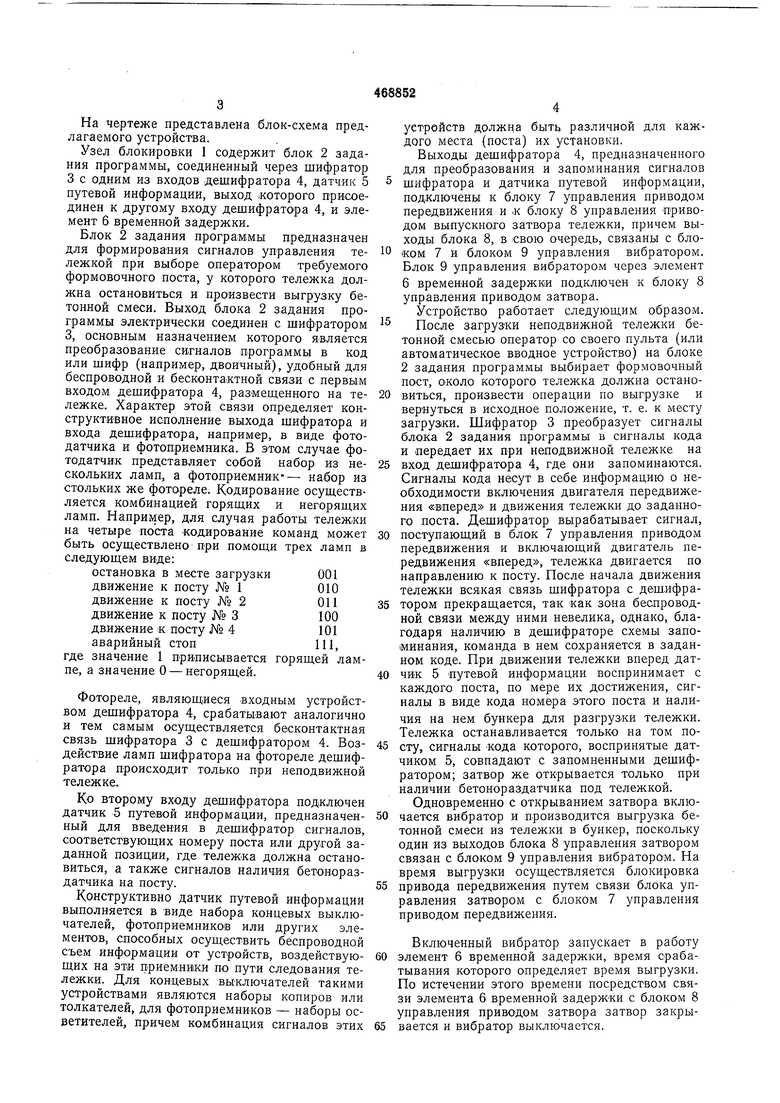
На чертеже представлена блок-схема предлагаемого устройства.
Узел блокировКИ 1 содержит блок 2 задания программы, соединенный через шифратор 3 с одним из входов дешифратора 4, датчик 5 путевой информации, выход .которого присоединен к другому входу дешифратора 4, и элемент 6 временной задержки.
Блок 2 задания програм.мы предназначен для формирования сигналов управления тележкой при выборе оператором требуемого формовочного поста, у которого тележка должна остановиться и произвести выгрузку бетонной смеси. Выход блока 2 задания программы электрически соединен с шифратором 3, основным назначением которого является преобразование сигналов программы в код или шифр (например, двоичный), удобный для беспроводной и бесконтактной связи с первым входом дешифратора 4, размеш;енного на тележке. Характер этой связи определяет конструктивное исполнение выхода шифратора и входа дешифратора, например, в виде фотодатчика и фотоприемника. В этом случае фотодатчик представляет собой набор из нескольких ламп, а фотоприемник-- набор из стольких же фотореле. Кодирование осушествляется комбинацией горяших и негоряш,их ламп. Например, для случая работы тележки на четыре поста кодирование команд может быть осушествлено при помош,и трех ламп в следуюшем виде:
остановка в месте загрузки001
движение к посту № 1010
движение к посту № 2011
движение к посту № 3100
движение к посту № 4101
аварийный стоп111,
где значение 1 приписывается горящей лампе, а значение О - негоряшей.
Фотореле, являюШИеся входным устройством дешифратора 4, срабатывают аналогично и тем самым осуществляется бесконтактная связь шифратора 3 с дешифратором 4. Воздействие ламп шифратора на фотореле дешифратора происходит только при неподвижной тележке.
Ко второму входу дешифратора подключен датчик 5 путевой информации, предназначенный для введения в дешифратор сигналов, соответствующих номеру поста или другой заданной позиции, где тележ ка должна остановиться, а также сигналов наличия бетонораздатчика на посту.
Конструктивно датчик путевой информации выполняется в виде набора концевых выключателей, фотоприемников или других элементов, способных осуществить беспроводной съем информации от устройств, воздействующих на эти приемники по пути следования тележки. Для концевых выключателей такими устройствами являются наборы копиров или толкателей, для фотолриемников - наборы осветителей, причем комбинация сигналов этих
устройств должна быть различной для каждого места (поста) их установки.
Выходы дешифратора 4, предназначенного для преобразования и запоминания сигналов шифратора и датчика путевой информации, подключены к блоку 7 управления приводом передвижения и к блоку 8 управления приводом выпускного затвора тележки, причем выходы блока 8, в свою очередь, связаны с блоком 7 и блоком 9 управления вибратором.
Блок 9 управления вибратором через элемент
6 временной задержки подключен к блоку 8
управления приводом затвора.
Устройство работает следующим образом.
После загрузки неподвижной тележки бетонной смесью оператор со своего пульта (или автоматическое вводное устройство) на блоке 2 задания программы выбирает формовочный пост, около которого тележка должна остановиться, произвести операции по выгрузке и вернуться в исходное положение, т. е. к месту загру31ки. Шифратор 3 преобразует сигналы блока 2 задания программы в сигналы кода и передает их при неподвижной тележке на
вход дешифратора 4, где они запоминаются. Сигналы кода несут в себе информацию о необходимости включения двигателя передвижения «вперед и движения тележки до заданного поста. Дешифратор вырабатывает сигнал,
поступающий в блок 7 управления приводом передвижения и включающий двигатель передвижения «вперед, тележка двигается по направлению к посту. После начала движения тележки всякая связь шифратора с дешифратором прекращается, так как зона беспроводной связи между ними невелика, однако, благодаря наличию в дешифраторе схемы запо1минания, команда в нем сохраняется в заданном коде. При движении тележки вперед датчик 5 путевой информации воспринимает с каждого поста, по мере их достижения, сигналы в виде кода номера этого поста и наличия на нем бункера для разгрузки тележки. Тележка останавливается только на том посту, сигналы кода которого, воспринятые датчиком 5, совпадают с запомненными дешифратором; затвор же открывается только при наличии бетонораздатчика под тележкой. Одновременно с открыванием затвора включается вибратор и производится выгрузка бетонной смеси из тележки в бункер, поскольку один из выходов блока 8 управления затвором связан с блоком 9 управления вибратором. На время выгрузки осуществляется блокировка
нривода передвижения путем связи блока управления затвором с блоком 7 управления приводом передвижения.
Включенный вибратор запускает в работу элемент 6 временной задержки, время срабатывания которого определяет время выгрузки. По истечении этого времени посредством связи элемента 6 временной задержки с блоком 8 управления приводом затвора затвор закрывается и вибратор выключается.
Последовательные операции открывания затвора и срабатывание элемента 6 временной задержки подготавливают цепи для включения двигателя передвижения «назад. После закрытия затвора снимается блокировка привода передвижения и тележка двигается назад, к месту загрузки.
К месту загрузки сигналы, поступающие от датчика путевой информации на дешифратор и затем на блок управления приводом передвижения останавливают тележку, схема устройства возвращается в исходное положение и тележка готова для загрузки и отправления ее на очередной пост.
Предмет изобретения
Устройство для управления бетоновозной тележкой, содержащее блок управления приводом передвижения, блок управления приводом затвора, блок управления вибратором
и узел блокировки, служащий для раздельного управления приводами, отличающееся тем, что, с целью повыщения надежности работы устройства и исключения ложных срабатываний, узел блокировки содержит блок задания программы, шифратор, дешифратор управляющих команд, датчик путевой информации и элемент временной задержки, причем один вход дещифратора соединен через шнфратор с выходом блока задания программы, другой вход дешифратора подключен к датчику путевой информации, выходы дещифратора соединены с блоком управления приводом передвижения и блоком управления приводом затвора, который, в свою очередь, связан с блоком управления приводом передвижения и блоком управления вибратором, при этом выход блока управления вибратором через элемент временной задержки подключен
ко входу блока управления приводом затвора.
