усилия уравновешивания поршня 10. По гидравлическому каналу балансировки положения поршня 10 внутренняя полость цилиндраиндикатора связана через переключаюший клапан 12 с полостью регулируемого давления следяш,его золотника 13, т. е. с его выходом.
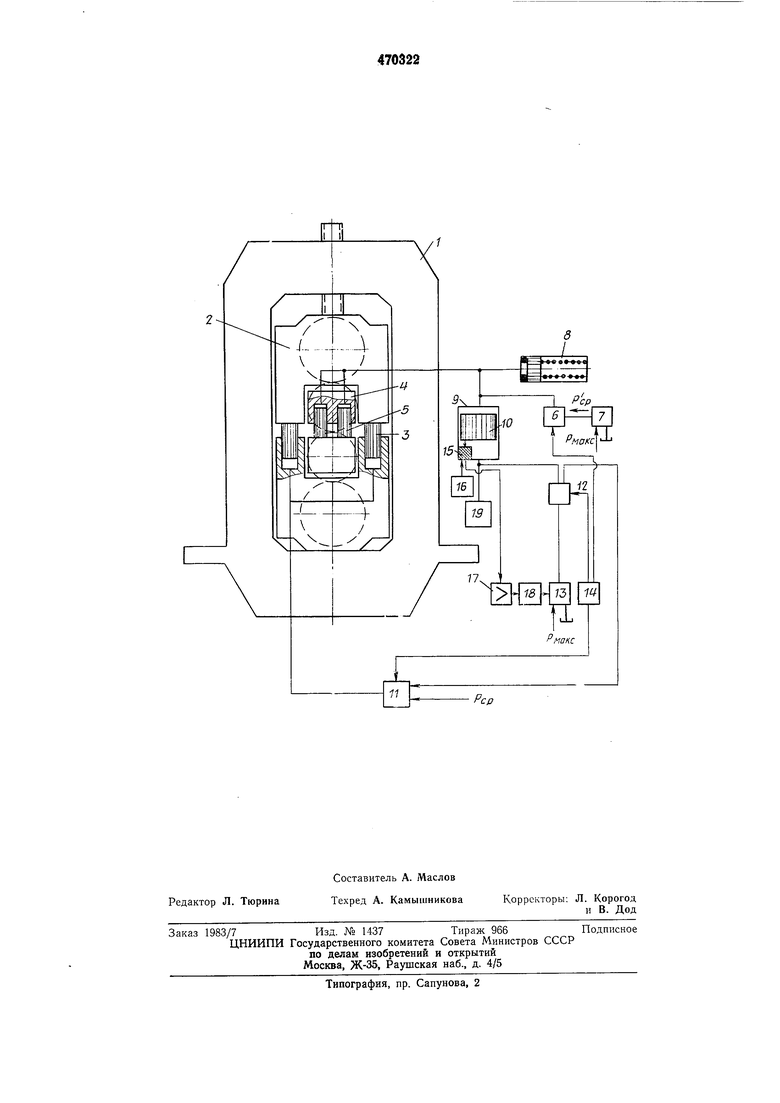
В процессе перестройки клети клапаны 6 и 11 открыты, и в полости силовых цилиндров 5 и 3 поступает рабочее тело с некоторым средним давлением Рср. и Рср.
Редукционным клапаном 7 величина давления Рср. подбирается из условий профилеобразования прокатываемой полосы.
Одновременно с этим командоаппаратом 14 переключающий клапан 12 устанавливается в такое положение, когда выход золотника 13 подключается к внутренней полости цилиндра-пружины и отключается от клапана 11. Тем самым поршень 10 находится под воздействием двух давлений: Рср. и давления в цилиндре-пружине 19, непрерывно корректируемого работой золотпика 13 через датчик 15, усилитель 11 и электродвигатель 18. Если поршень 10 занимает среднее (исходное нулевое) положение, то выходной сигнал датчика положения равняется нулю, и чувствительный орган золотника 13 занимает нейтральное положение, чем достигается изоляция внутренней полости цилиндра-пружины 19 от внешней среды. Если давление рабочего тела в цилиндре 19 несколько снижается относительно Рср., то датчиком полол ения 15 вырабатывается сигнал, открывающий золотник 13 на подачу давления к цилиндру 19, и наоборот.
Таким образом система в процессе перестройки клети сама устанавливается в исходное положение и находится в состоянии динамического равновесия.
Как только процесс перестройки закончился, в период прокатки полосы командоаппаратом 14 закрывается клапан 6, а клапаны 11 и 12 устанавливаются в такое положение, что выход золотника 13 изолируется от цилиндра 19 и подключается к каналу гидравлического нагружения опорных валков. Магистрали с давлениями Рср. и Рор. отключаются от силовых цилиндров. В этом случае любые отклонения давления в силовых цилиндрах 5 рабочих валков через поршень 10 оказывают воздействие на датчик положения 15 и следящий золотник 13, вызывая соответствующие изменения давления в цилиндрах гидрораепора опорных валков.
Если, например, толщина прокатываемой полосы увеличивается, то давление в силовых цилиндрах 5 снижается (в процессе саморегулирования), и поршень 10 цилиндра-индикатора смещается вверх под влиянием давления
рабочего тела, герметизированного в цилиндре-пружине 19. Это приводит к появлению на выходе датчика положения 15 сигнала, обуславливающего перемещение чувствительного органа золотника 13 в положение, когда выходная полость его соединяется со сливом.
Таким образом, начинает снижаться давление в гидросистеме распора опорных валков, и тем самым обеспечивается дополнительное
обжатие прокатываемой полосы и восстановление ее толщины до заданного размера. Вместе с этим восстанавливается давление в силовых цилиндрах 5, а порщень 10 возвращается в исходное положение.
При снижении толщины прокатываемой полосы имеет место обратный процесс. При выходе полосы из клети в силовых цилиндрах 3 и 5 резко возрастает давление, вследствие проседания клети. Как только давление в цилиндрах 5 достигает критического уровня, срабатывает демпфирующее устройство 8, порщень которого отходит вправо от жесткого упора. Тем самым характеристика замкнутой гидросистемы резко меняет свой наклон, становится мягкой, чем предохраняются от повреждения рабочие валки. Поршень 10 перемещается вниз до тех пор, пока давление рабочего тела в цилиндре-пружине 19 не возрастает до необходимой величины, вследствие его высокой жесткости. При этом золотник 13 подает максимальное давление в полость силовых цилиндров 3. В таком положении система находится до захода следующей полосы, когда процесс регулирования снова
повторяется.
Предмет изобретения
Электрогидравлическая следящая система автоматического регулирования толщины прокатываемой полосы, включающая гидроцилиндры локального предварительного напряжения рабочих валков, образующие в процессе автоматического регулирования замкнутую гидросистему с цилиндром-демпфером и цилиндром-индикатором давления рабочей жидкости, а также цилиндры гидрораспора опорных валков и следящий золотник, регулирующий давление жидкости в гидроцилиндрах, отличающаяся тем, что, с целью повыщения быстродействия и надежности регулирования, в канал управления следящим золотником включен датчик положения валков, кинематически взаимодействующий с поршнем цилиндра-индикатора, размещенного вне опор
валков и содержащего полость гидравлического уравновешивания его поршня, включающую вспомогательный цилиндр-пружину, который через переключающий клапан гидравлически соединен каналом балансировки нулевого положения датчика со следящим золотником.
Pi
cp
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования профиля полосы в итерационной электрогидравлической системе автоматической стабилизации толщины проката | 1974 |
|
SU533412A1 |
| Устройство для автоматического регулирования поперечного профиля прокатываемой полосы | 1972 |
|
SU491421A1 |
| Устройство для адаптивной настройкиРЕгуляТОРА ТОлщиНы пРОКАТА HA ТРЕбуЕМыйпАРАМЕТР | 1976 |
|
SU806187A1 |
| Устройство для регулирования жесткости прокатной клети | 1977 |
|
SU749479A1 |
| Система автоматического регулирования продольной разнотолщинности полосового проката | 1977 |
|
SU737044A1 |
| Устройство для измерения толщины проката | 1978 |
|
SU751460A1 |
| Гидравлическое нажимное устройство с гидрокомпенсацией упругой деформации прокатной клети | 1985 |
|
SU1253687A1 |
| Гидравлическое нажимное устройство прокатного стана | 1983 |
|
SU1110509A2 |
| Гидравлическое нажимное устройство с гидрокомпенсацией упругой деформации прокатной клети | 1981 |
|
SU1028398A1 |
| Устройство для стабилизации раствораВАлКОВ пРОКАТНОй КлЕТи | 1979 |
|
SU804030A1 |