(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АДАПТИВНЫМ РОБОТОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления адаптив-НыХ РОбОТОМ | 1979 |
|
SU834667A1 |
| Устройство для управления адаптивным роботом | 1978 |
|
SU714354A1 |
| Устройство для управления адаптивным роботом | 1977 |
|
SU704775A1 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU881669A1 |
| Устройство для управления адаптивным роботом | 1979 |
|
SU883867A2 |
| Устройство для управления адап-ТиВНыМ РОбОТОМ | 1978 |
|
SU811202A1 |
| Устройство для управления адаптивным РОбОТОМ | 1978 |
|
SU813360A1 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU888072A1 |
| Устройство для управления адаптивным роботом | 1974 |
|
SU470791A1 |
| Устройство для управления адаптивнымРОбОТОМ | 1979 |
|
SU798710A1 |
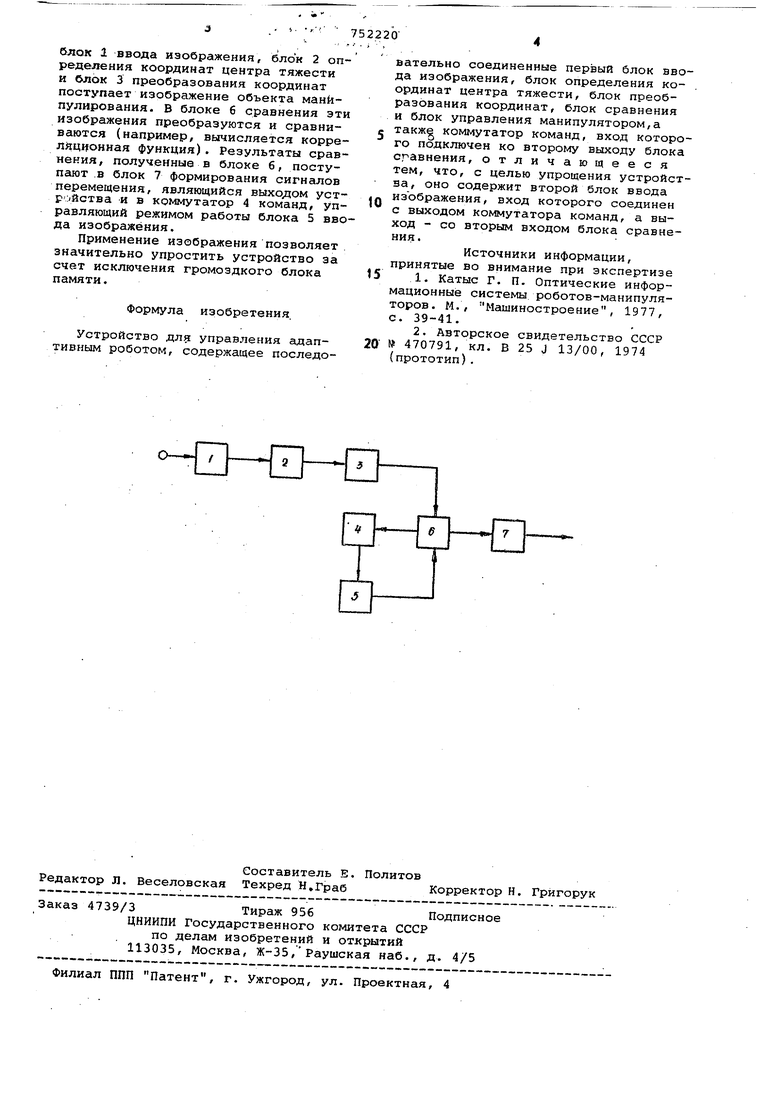
Изобретение относится к робототехнике и может быть использовано при создании адаптивных роботов,пре назначенных для автоматизации проиэ водственных процессов. Известно устройство для управления адаптивным роботом, содержащее пульт управления, электронно-вычислительную машину, блок управления манипулятором передающую телевизион ную камеру 1. Однако такое устройство требует значительного объема памяти. Наиболее близким техническим решением к предлагаемому изобретению является устройство, содержащее последовательно соединенные первый блок ввода изображения, блок опреде ления координат центра тяжести,блок преобразования координат, блок срав нения и блок управления манипулятором, а также коммутатор команд,вход которого подключен ко второму выход блока сравнения 2. Недостатком этого устройства является его сложность, обусловленная наличием блока памяти, в котором хранятся автокорреляционные функции эталонных изображений. Цель изобретения - упрощение устройства. Поставленная цель достигается тем, что устройство содержит второй блок ввода изображения, вход которого .соединен с выходом коммутатора команд, а выход - со вторым входом блока сравнения. На чертеже представлена функциональная схема устройства. Схема содержит первый блок 1 ввода изображения, блок 2 определения координат центра тяжести/ блок 3 преобразования координта, коммутатор 4 команд, второй блок 5 ввода изображения, блок 6 С1эавнения, блок 7 управления манипулятором. Устройство работает следующим образом. Во второй блок 5 ввода изображения на вращающуюся платформу устанавливается один экземпляр из ряда одинаковых объектов, с которыми будет производиться манипулирование, или его уменьшенная копия, если объект имеет большие размеры. Изображение вращающегося объекта поступает в блок 6 сравнения. На другой вход блока 6 сравнения через первый
блок 1 ввода изображения, блок 2 определения координат центра тяжести и блок 3 преобразования координат поступает изображение объекта манипулирования. В блоке 6 сравнения эти изображения преобразуются и сравниваются (например, вычисляется корреляционная функция). Результаты сравнения, полученные в блоке б, поступают .в блок 7 формирования сигнгшов перемещения, являющийся выходом устройства и в коммутатор 4 команд, управляющий режимом работы блока 5 ввода изображения.
Применение изображения позволяет значительно упростить устройство за счет исключения громоздкого блока памяти.
Формула изобретения,
Устройство для управления адаптивным роботом, содержащее последовательно соединенные первый блок ввода изображения, блок определения координат центра тяжести, блок преобразования координат, блок сравнения и блок управления манипулятором,а также коммутатор команд, вход которого подключен ко второг«1у выходу блока сравнения, отличающееся тем, что, с целью упрощения устройства, оно содержит второй блок ввода изображения, вход которого соединен с выходом коммутатора команд, а выход - со вторым входом блока сравнения- Источники информации, принятые во внимание при экспертизе
(прототип).
