I
Изобретение относится к судостроению и касается устройства для безударной передачи грузов в условиях качки.
Известные устройства подобного назначения содержат механизм подключения (введения) груза в режим слежения за палубой принимающего судна.
Известны устройства, в которых подключение груза в режим слежения осуществляется с помощью обычных муфт включения (мехапических, электрических и т. п.), механизмов, регулирующих работу насосов переменной производительности, или с помощью кулисного механизма, в котором камень кулисы является шкивом, связанным через запасованиый грузовой трос с механизмом подъема, а сам щкив перемещается с помощью толкателя, связанного с мехапизмом слежения.
Такие муфты или механизмы, регулирующие работу насоса иеременной производительности, не обеспечивают плавности, вследствие чего включение груза в режим слежепия происходит мгновенно, с возникновением ударных нагрузок. Однако кулисный механизм, обеспечивая плавность введения, увеличивает диапазон колебаний принимающего и передающего судов, требует увеличения размеров кулисы или коэффициента полиспастпости.
Цель пзобретения - уменьщение габаритов и веса, а упрощение и повышение надежности устройства.
Для этого механизм плавного введения груза в режим слежения вынолнеп в виде двух соосиых барабанов, поворотных относительно друг друга на 360° и связанных собой посредством впнта, резьба которого под каждый из барабанов выполнепа несамотормозящейся и противоположного направления, а внутри винта пропущен щлгщевой вал, кинематически связанный с прпводом слежения, при этом винт снабжен прпводом перемещения его вдоль щлицевого вала, а па барабанах закреплены два кониа троса, связапного через уравпптельный блок с полиспастпой системой грузового троса.
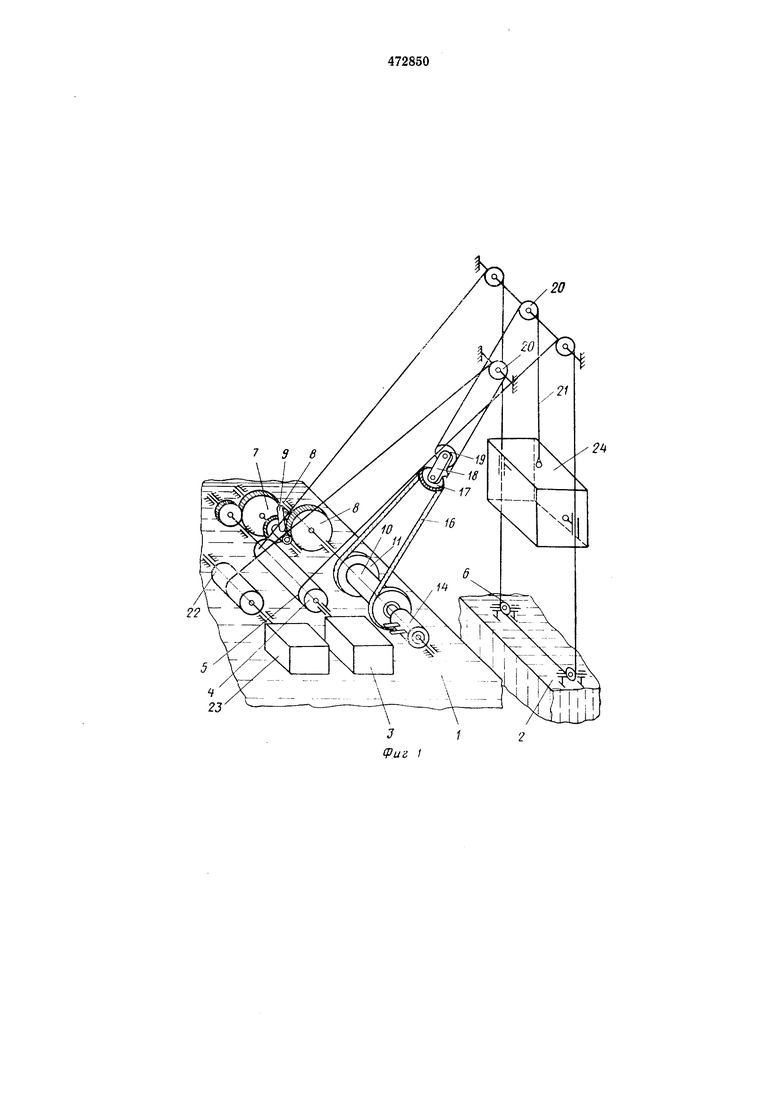
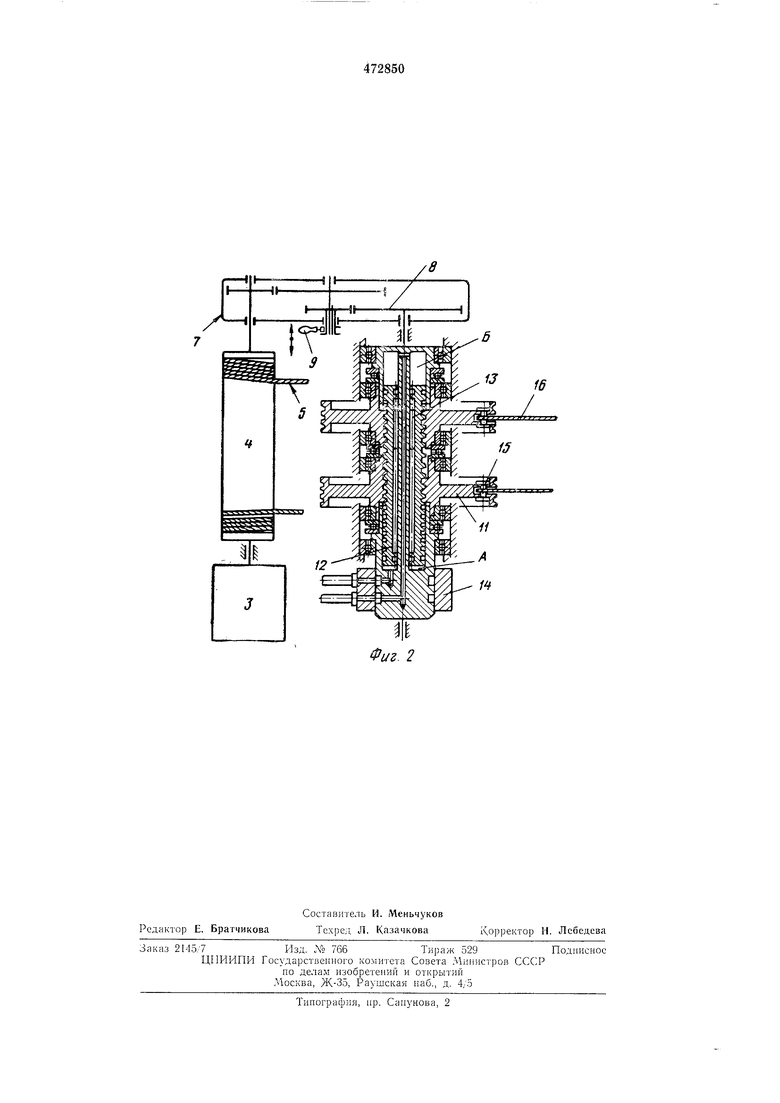
Иа фиг. 1 изображепо устройство для передачи грузов иа суда в условиях качки; на фиг. 2 - схема механизма илавпого введения груза в режим .
Устройство для передачи грузов на суда в условиях качки с передающего судиа 1 на палубу прппимающего судпа 2 содержит следящую лебедку, состоящую из следящего привода 3 (электрогпдравлического, пневматического и т. и.) и следящего барабана 4, который посредством следящих тросов 5 через уравиительпые блоки 6 связан с палубой принимающего судпа. Движепие от следящего барабапа
через редуктор 7, имеющий зубчатую иередачу 8, которая включается в зацепление рукояткой 9, передается на механизм 10 плавного введения (выведения) груза в режим слежения.
Механизм 10 состоит из двух соосных барабанов И, поворотных относительно друг друга на 360° и связанных между собой посредством винта 12, имеющего на наружной поверхности под каждым барабаном несамотормозящуюся и нротивоположпого паправления резьбу, а внутри винта пропущен щлипевой вал 13, который кипематически связан с приводом слежения, с помощью привода винт 12 может перемещаться вдоль щлнцевого вала.
Винт 12 иеремещается подачей жидкости в нолости А или Б механизма 10, которая осуществляется с помощьЕО системы вращаюо егося подвода жидкостн от неподвижной втулки 14. На барабанах 11 также закреплены с помощью новоротных проушин 15 два конца троса 16, связанного через уравннтельный блок 17 с полиспастной системой 18, включающей нодвижиый блок 19 и неподвижные блоки 20, грузового троса 21. Грузовой трос 21 через ту же полиспастную систему связан с барабапом 22 привода 23 подъема и подппмаемым грузом 24.
В процессе отработки совместных колебаний следящим приводом 3 до пачала опускания груза 24 механизм 10 нлавного введения (выведения) груза в режим слежения отключен от следящего иривода 3 с иомондью зубчатой нередачн 8, а его поворотные барабаны 11 расположены таким образом, что угол между местамн закрепленпя троса 16 равен 0°. При подаче жидкости в нолость А механизма 10 винт 12, двигаясь поступательно по шлицам вала 13, разворачивает места закрепления тросов па барабанах 11 в разные стороны па угол 360°, прп этом трос 16 наматывается на каждый барабан в разные стороны, момент на шлицевом валу 13 механизма 10 равен нулю.
В момент начала опускания груза 24 приводом 23 нодъема включается рукоятка 9 зубчатой передачи 8, посредством чего 10 плавного введения груза в режим слежения подключается к механизму слежеппя, т. е. мехапизе нлавного введения нрнводится в готовность.
В то же время трос 16, сматываясь с одного барабана 11 и наматываясь на другой.
нроворачивает уравннтельпый блок 17, пе сообщая ему ноступательного движения, и груз 24 все еще исключен из режима слежения и, так как момент на приводпом валу механизд:а 10 равен нулю, следящий привод не затрачивает мопдностн на его проворачивание. При подаче жидкостн в полость Б механизма груз 24 плавно вводится в режим слежения.
При этом винт 12 постепенно (плавно) разворачивает места закренления троса 16 на барабанах 11, уменьщая угол ними от 360° до 0°, при этом вращательное двнжение механизма 10 нрнводнт к ностепенному увелнчению амплитуды ноступательного движения уравпительпого блока 17.
В ноложе1П1и, когда угол между местами закрепления троса 16 на барабанах равен 0°, трос 16 наматывается на оба барабаг а в одном и том же направлении, сообн1ая уравнительному блоку 17 н тюдвижному блоку 9 лолиспастной системы 18, а через них и грузу 24 неремеп1,енне, соответствую цее совместному колебанию судов.
Груз ВЫВОД1ГГСЯ из режима слежения при
передаче груза с принимающего су;;на на нередаюгцее в обратном порядке.
Предмет изобретения
Устройство для передачи грузов па суда в условиях ачки, содержапдее подъемный и следящий приводы, сиабжеииые грузовым и
следящим тросами, а также механнзм плавного введения груза в режим слеженпя за палубой прппимающего судиа, отличаюHI е е с я тем, что, с целью уменьшения габаритов и веса, а также упроп1ения и повышення надежностн устройства, механизм плавного введения груза в режим слежения вынолнен в виде двух соосных барабанов, поворотных относительно друг друга на 360° и связанных между собой посредством винта,
резьба которого нод каждый из барабанов выполнена 1 есамотормозящейся и противоположного наиравления, а внутри виита пронуHien плицевой вал, кинематически связанный с приводом слежения, при этом вн1гг снабжен
прнводом нерсмен1,ения его вдоль и лицевого вала, а на барабанах закреплены два конца троса, связанного через уравнительный блок с полнспастной системой грузового троса,
20
16
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи грузовНА СудА B уСлОВияХ КАчКи | 1979 |
|
SU852711A1 |
| СУДОВОЙ КРАН ДЛЯ БЕЗУДАРНОЙ ПЕРЕГРУЗКИ ГРУЗОВ НРИ КАЧКЕ | 1971 |
|
SU417340A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА СУДОВОГО КРАНА | 2003 |
|
RU2262464C2 |
| Ш БИБЛИОТЕКА | 1972 |
|
SU356196A1 |
| УСТРОЙСТВО для БЕЗУДАРНОЙ ПЕРЕДАЧИ ГРУЗОВ В УСЛОВИЯХ КАЧКИ | 1973 |
|
SU408852A1 |
| Судовое устройство для передачи грузов и пересадки людей в море | 1989 |
|
SU1682233A1 |
| СУДОВОЙ КРАН | 2002 |
|
RU2241633C2 |
| Система для безударной передачи груза с судна на судно в условиях волнения моря | 1982 |
|
SU1030249A1 |
| Устройство для передачи людей и грузов в море с обслуживающей платформы на судно | 1981 |
|
SU954320A1 |
| Устройство для пересадки людей с судна на судно в условиях качки | 1975 |
|
SU695891A1 |