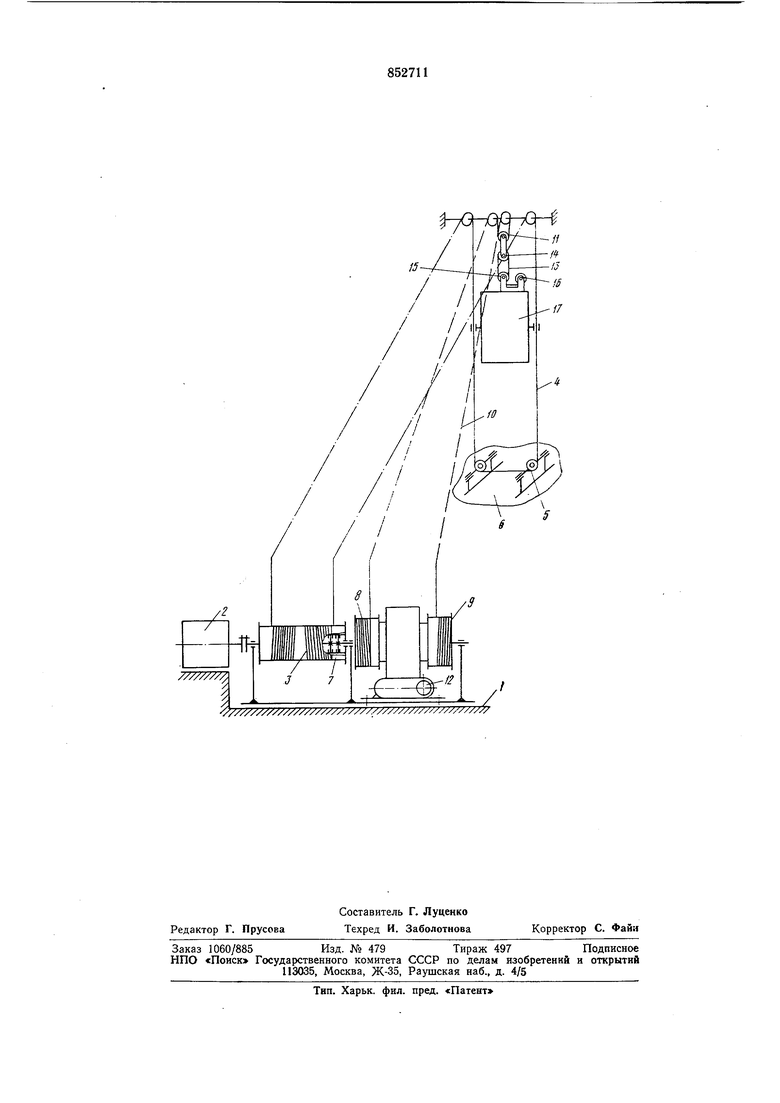
полнительного троса 10, связанного через дополнительный уравнительный блок // с полиспастной системой грузового троса. Дополнительные барабаны снабжены приводом 12 их взаимного разворота одного относительно другого и связаны посредством кинематической передачи между собой, со следящим приводом и с приводом их разворота. Полиспастная система грузового троса 13 включает в себя блок 14, связанный серьгой с уравнительным блоком 11, и блок 15, закрепленный совместно с подъемным приводом 16 на грузовой платформе 17. Один конец грузового троса закреплен па грузовой платформе, а другой намотан на барабап подъемного иривода.
После загружения грузовая платформа 17 выводится в крайнее верхнее полол :епие, при котором дополнительные барабаны 8 9 с. помощью привода 12 разворота через кинематическую передачу развернуты в разные стороны до тех пор, пока не будет максимальным угол между местами закрепления троса 10 на барабанах.
Затем грузовая платформа вьивешявается над палубой лриним ающего судна 5 и с помощью следящего привода 2 следящий трос 4 опускается па палубу судна, где закрепляется посредством уравнительных блоков 5. При этом муфта 7 отключена и следящий привод 2 начинает обработку взаимных перемещений судов / и 6.
После этого включением муфты 7 сцеплевия узел .введения ,лрузовой ллатфармы в режим слежйЕия подключается к следящему приводу 2. При этом трос 10, сматываясь с одного дополиительного ба:рабана 8 (9) и наматываясь на другой (9) 8, ировор,а1ЧИ|вает дополнительный уравнительный блок JI, не сообщая ему поступательного перемещения ио вертикали. В это Брем.я грузовая платформа 17 все еще исключена из режима слежения, и так как крутяш,ий момент на муфте 7 от силы тяжести груза равен пулю, следящий привод 2 не затрачивает мощности на проворачивание кинематической иередачи узла введения в режим слежения, если не учитывать потерь па трепие в опорных подшипниках, уравнительном блоке // и др.
Затем включается привод 12 разворота, который разворачивает барабаны, уменьшая до нуля угол между местами закрепления па них троса 10. При этом грузовая платформа 17, опускаясь вниз, одновременно вводится в режим слежения за палубой принимающего судна 6. Окончательное
опускание грузовой платформы производится включением подъемного привода. При этом грузовой трос 13 сматывается с его барабапа под действием груза, увеличивая расстояние между полиспастными блоками 11 и 14.
Перепогрузка с судна 6 на судно / осуществляется в обратной последовательности.
Предлагаемое устройство надежно в эксплуатации.
Формул,а изобретения
1. Устройство для передачи грузов на суда в условиях качки, включающее подъемпый и следящий приводы с барабаиами, через которые заведены грузовой трос, снабженный полиспастной системой, и следящий трос, грузовую платформу, связанную с концом грузового троса, уравнительные блоки, смонтированные на припимающем судне, через которые запасован следящий трос, ходовые концы которого ирикреплепы к упомянутому барабану следящего привода, а также узел введения грузовой платформы в режим слежения за палубой иринимающего, судна, содержащий два соосных « смонтированных с возможностью поворота друг относительно друга дополнительных барабана, на которых закреплены два конца дополнительного троса, связанного через дополнительный уравнительный блок с полиспастпой системой
грузового троса, причем дополнительные барабаны снабжены приводом их взаимного разворота друг относительно друга и связаны посредством кинематической передачи между собой, со следящим приводом и приводом их разворота, отличающееся тем, что, с целью повышения надежности в эксплуатации, подъемный привод кинематически связан с полиспастпой системой грузового троса и установлеи на грузовой платформе.
2. Устройство по п. 1, отличающеес я тем, что кинематическая связь содержит серьгу, шарнирно установленную на дополнительном уравнительном блоке и
блоке полиспастной системы грузового троса.
Источник информации, принятый во внимание при экспертизе:
. Авторское свидетельство СССР ДГо 472850, кл. В 63 В 27/00, 15.10.71 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи грузов на суда в условиях качки | 1971 |
|
SU472850A1 |
| СУДОВОЙ КРАН ДЛЯ БЕЗУДАРНОЙ ПЕРЕГРУЗКИ ГРУЗОВ НРИ КАЧКЕ | 1971 |
|
SU417340A1 |
| Система для безударной передачи груза с судна на судно в условиях волнения моря | 1982 |
|
SU1030249A1 |
| Устройство для передачи людей и грузов в море с обслуживающей платформы на судно | 1981 |
|
SU954320A1 |
| Система для безударной передачи гРузА C СудНА HA СудНО B уСлОВияХВОлНЕНия МОРя | 1979 |
|
SU816867A1 |
| Система передачи груза с судна на судно | 1980 |
|
SU935372A1 |
| Устройство для спуска и подъема плавсредств в открытом море | 1972 |
|
SU458479A1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ПРИ ВОЛНЕНИИ | 1973 |
|
SU378372A1 |
| Устройство для передачи грузов с одного судна на другое в условиях открытого моря | 1975 |
|
SU549378A1 |
| УСТРОЙСТВО для БЕЗУДАРНОЙ ПЕРЕДАЧИ ГРУЗОВ В УСЛОВИЯХ КАЧКИ | 1973 |
|
SU408852A1 |