В вариантах изобретения в первом случае транспортер-перекладчик снабжен поперечной рейкой 12, во-втором - рейкой 13.
Штанговый транспортер-перекладчик работает следующим образом.
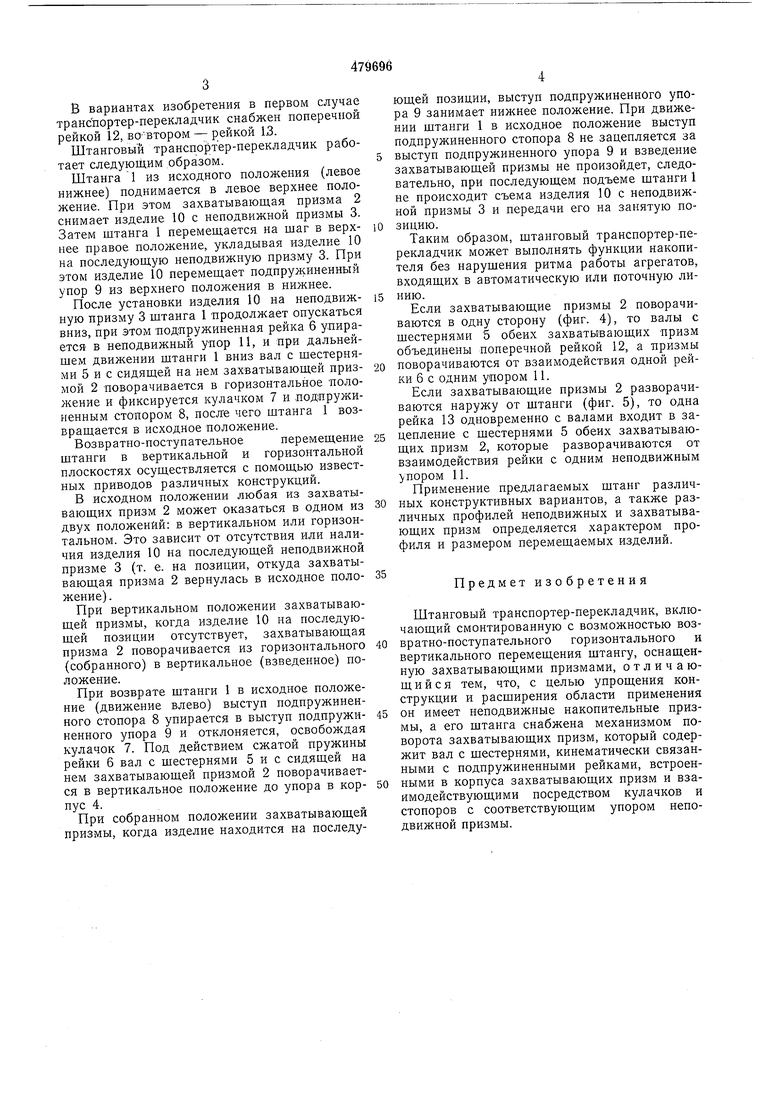
Штанга 1 из исходного положения (левое нижнее) поднимается в левое верхнее положение. При этом захватывающая призма 2 снимает изделие 10 с неподвижной призмы 3. Затем штанга 1 перемещается на шаг в верхнее правое положение, укладывая изделие 10 на последующую неподвижную призму 3. При этом изделие 10 перемещает подпружиненный упор 9 из верхнего пололсения в нижнее.
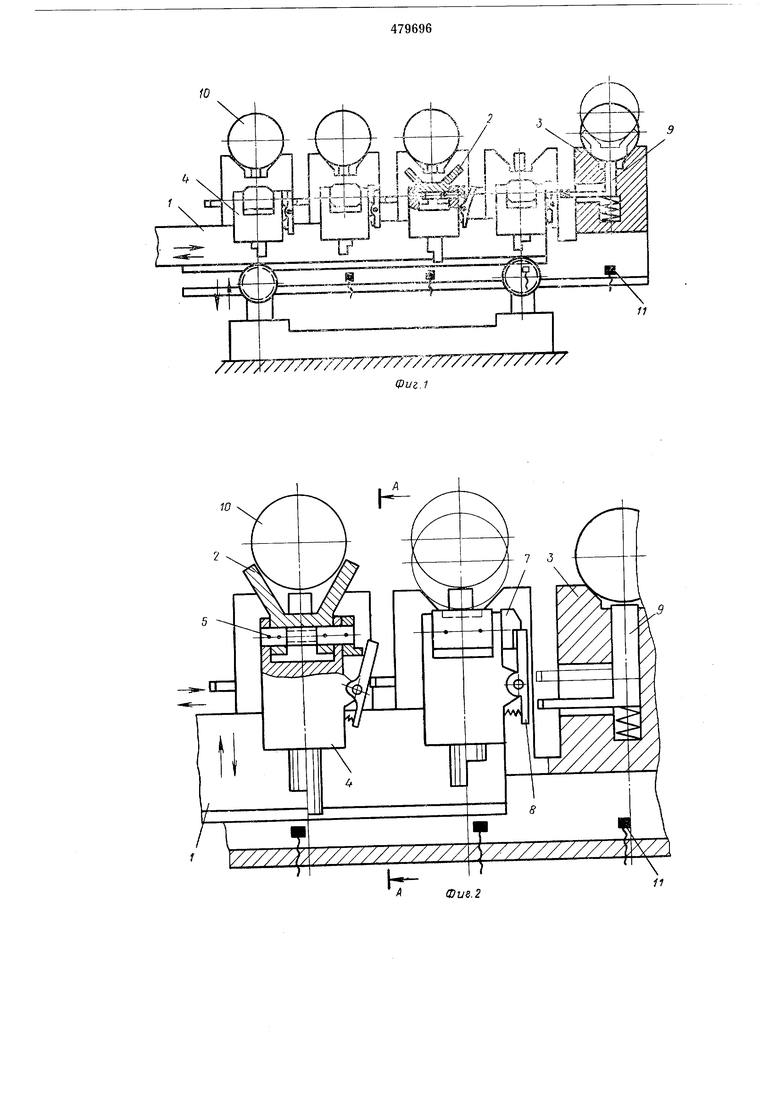
После установки изделия 10 на неподвижную призму 3 штанга 1 продолжает опускаться вниз, при этом подпружиненная рейка б упирается в неподвижный упор И, и при дальнейшем движении штанги 1 вниз вал с шестернями 5 и с сидяшей на нем захватывающей призмой 2 поворачивается в горизонтальное положение и фиксируется кулачком 7 и подпружиненным стопором 8, после чего штанга 1 возвращается в исходное положение.
Возвратно-поступательноеперемещение
штапгн в вертикальной и горизонтальной плоскостях осуществляется с помощью известных приводов различных конструкций.
В исходном положении любая из захватывающих призм 2 может оказаться в одном из двух положений: в вертикальном или горизонтальном. Это зависит от отсутствия или наличия изделия 10 на последующей неподвижной призме 3 (т. е. на позиции, откуда захватывающая призма 2 вернулась в исходное положение).
При вертикальном положении захватывающей призмы, когда изделие 10 на последующей позиции отсутствует, захватывающая призма 2 поворачивается из горизонтального (собранного) в вертикальное (взведенное) положение.
При возврате штанги 1 в исходное положение (движение влево) выступ подпружиненного стопора 8 упирается в выступ подпружиненного упора 9 и отклоняется, освобождая кулачок 7. Под действием сжатой пружины рейки 6 вал с шестернями бис сидящей на нем захватывающей призмой 2 поворачивается в вертикальное положение до упора в корпус 4.
При собранном положении захватывающей призмы, когда изделие находится на последующей позиции, выступ подпружиненного упора 9 занимает нижнее положение. При движении штанги 1 в исходное положение выступ подпружиненного стопора 8 не зацепляется за выступ подпружиненного упора 9 и взведение захватывающей призмы не произойдет, следовательно, при последующем подъеме штанги 1 не происходит съема изделия 10 с неподвижной призмы 3 и передачи его на занятую позицию.
Таким образом, штанговый транспортер-перекладчик может выполнять функции накопителя без нарушения ритма работы агрегатов, входящих в автоматическую или поточную линию.
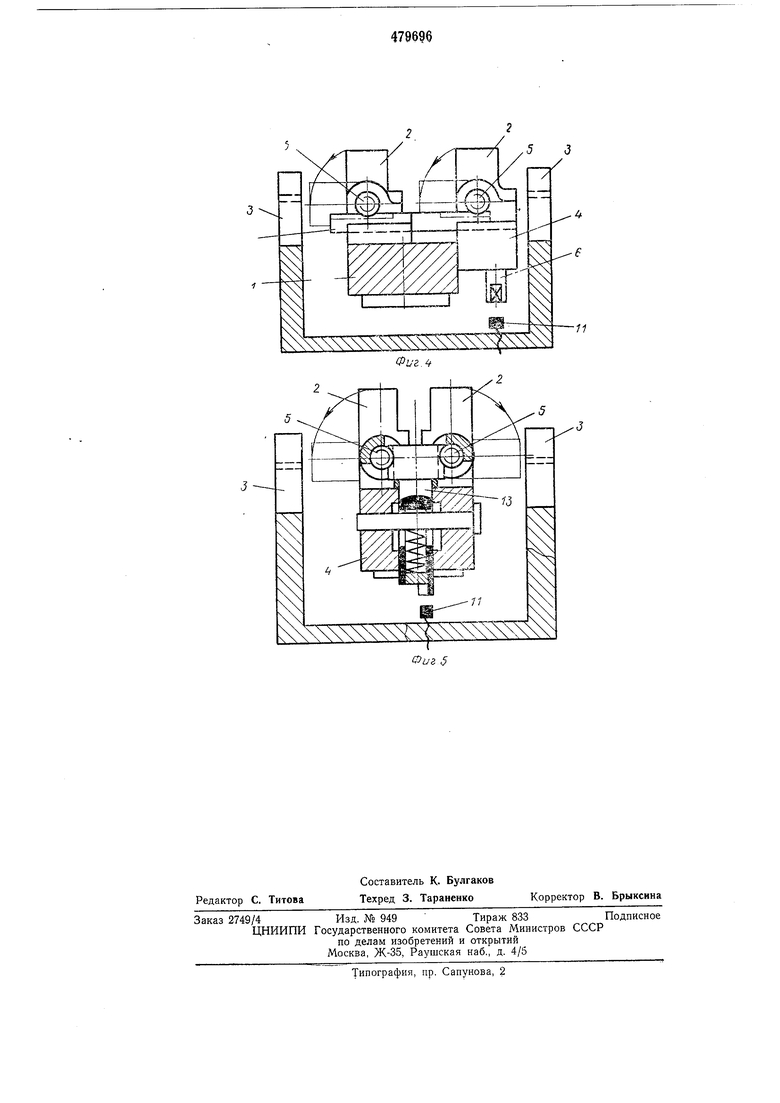
Если захватывающие призмы 2 поворачиваются в одну сторону (фиг. 4), то валы с шестернями 5 обеих захватывающих призм объединены поперечной рейкой 12, а призмы поворачиваются от взаимодействия одной рейки 6 с одним упором 11.
Если захватывающие призмы 2 разворачиваются наружу от штанги (фиг. 5), то одна рейка 13 одновременно с валами входит в зацепление с шестернями 5 обеих захватывающих призм 2, которые разворачиваются от взаимодействия рейки с одним неподвижным упором 11.
Применение предлагаемых штанг различных конструктивных вариантов, а также различных профилей неподвижных и захватывающих призм определяется характером профиля и размером перемещаемых изделий.
Предмет изобретения
Штанговый транспортер-перекладчик, включающий смонтированную с возможностью возвратно-поступательного горизонтального и вертикального перемещения штангу, оснащенную захватывающими призмами, отличающийся тем, что, с целью упрощения конструкции и расширения области применения он имеет неподвижные накопительные призмы, а его штанга снабжена механизмом поворота захватывающих призм, который содержит вал с шестернями, кинематически связанными с подпружиненными рейками, встроенными в корпуса захватывающих призм и взаимодействующими посредством кулачков и стопоров с соответствующим упором неподвижной призмы.
/777Т/77777 777Т777 Т777777777777777
Vuz-t
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционный автомат для сборки корпусных деталей с деталями типа подшипников и крышек | 1974 |
|
SU545443A1 |
| Автоматическая линия спутникового типа | 1991 |
|
SU1784445A1 |
| Полуавтоматическая линия для окончательной обработки, сборки и контроля блок-картеров двух типоразмеров двигателей внутреннего сгорания | 1973 |
|
SU443745A1 |
| Транспортер для передачи деталей с позиции на позицию | 1980 |
|
SU878502A1 |
| Многопозиционный сверлильный автомат | 1978 |
|
SU774819A1 |
| АВТО/\^АТИЧЕСКАЯ ЛИНИЯ УПАКОВКИ ИЗДЕЛИЙ | 1973 |
|
SU408741A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| ПЕРЕКЛАДЧИК | 1993 |
|
RU2041072C1 |
| Многопозиционный сверлильный автомат | 1977 |
|
SU663499A1 |
| Автооператор | 1969 |
|
SU344701A1 |
Фиа.г
10
Фцг.д
