1
Изобретение сможет найти применение в навесных системах сельскохозяйственных маишя, например тракторов с автоматическим регулированием глубины обработки по усилию, действующему в нижних тягах грузоподъемного механизма, илн по положению сельхозорудия (силовое, позиционное и комбинированное регулирование).
Известна система для регулирования гидроподъемного механизма трактора содержащая тяги, шарнирно соединенные с нижней осью гидроподъемного механизма, насос, подключенный через распределитель и гидроцилйндру, упругую ось, датчик силового и комбинированного регулирования, датчик позиционного регулирования, передаточный рычаг и рычаг переключения ре жимов.
Система эта плохо демонтируется и монтируется из-за органической связи с компоновкой трактора, так как выподрена в корпусе заднего моста трактора. Механические связи между упругой осью и валом подъемных рычагов, а также с дифференциальным механизмом при всей компа ктности узлов, расширяют объем на трак , торе, занимаемый системой.
Цель изобретения - упрощение конструкции и повышение эксплуатационных характеристик.
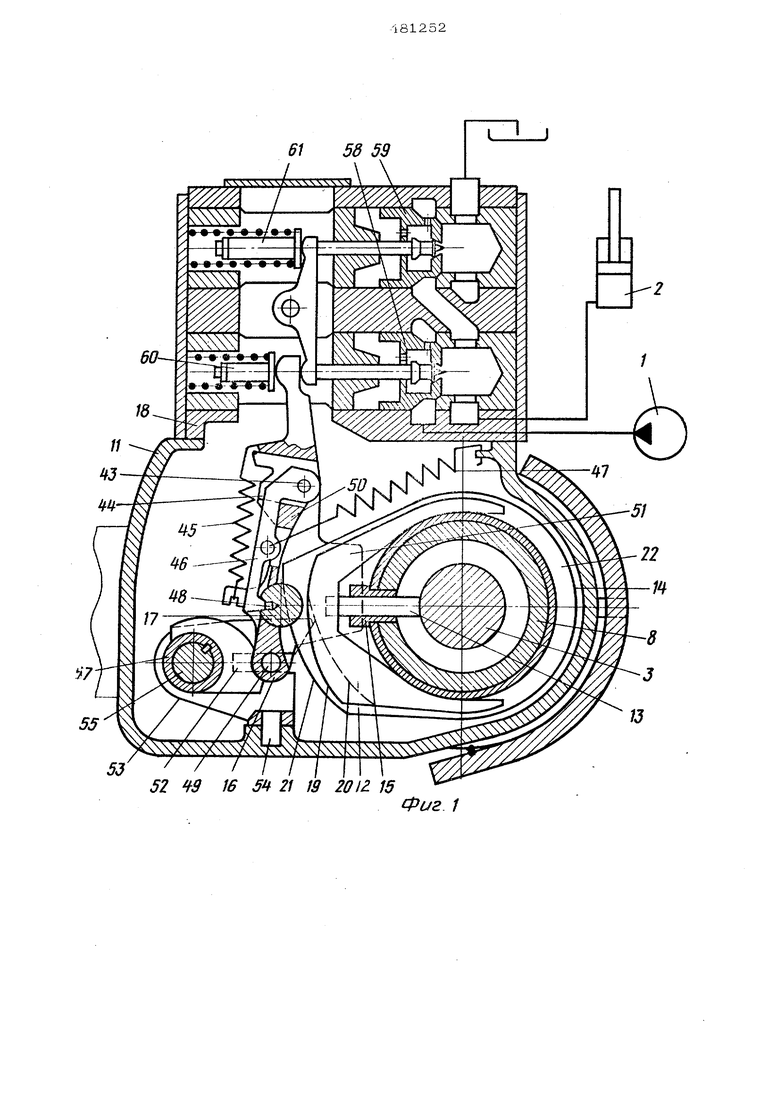
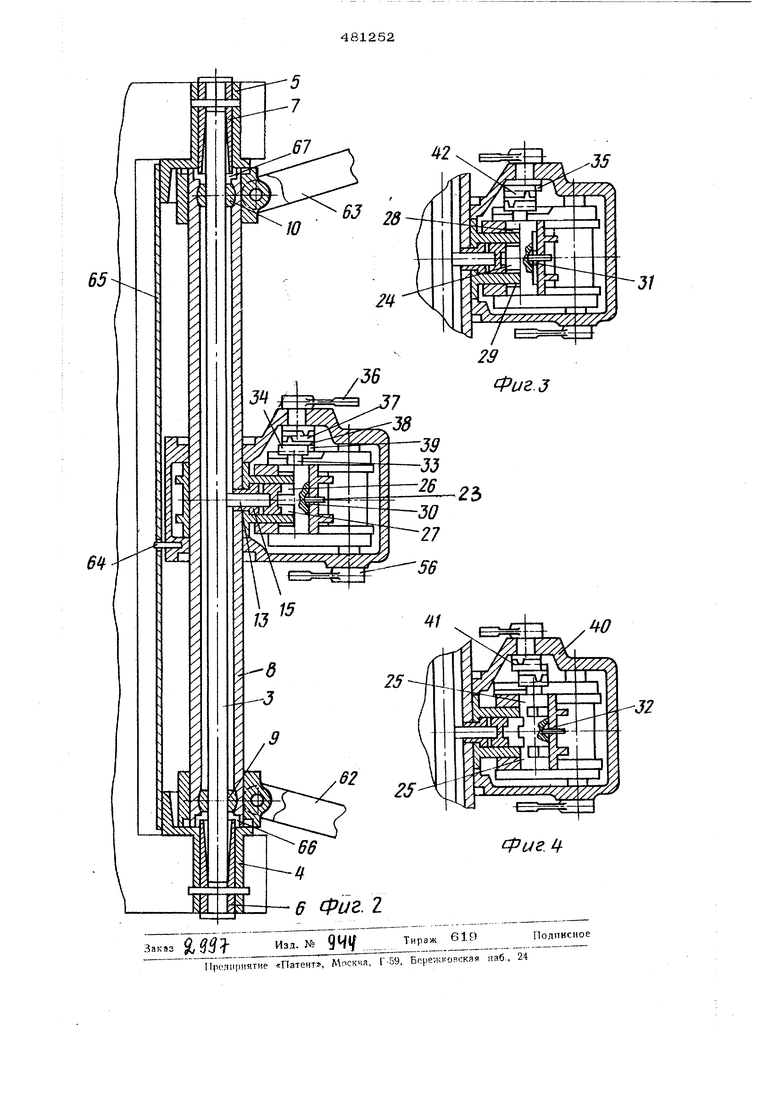
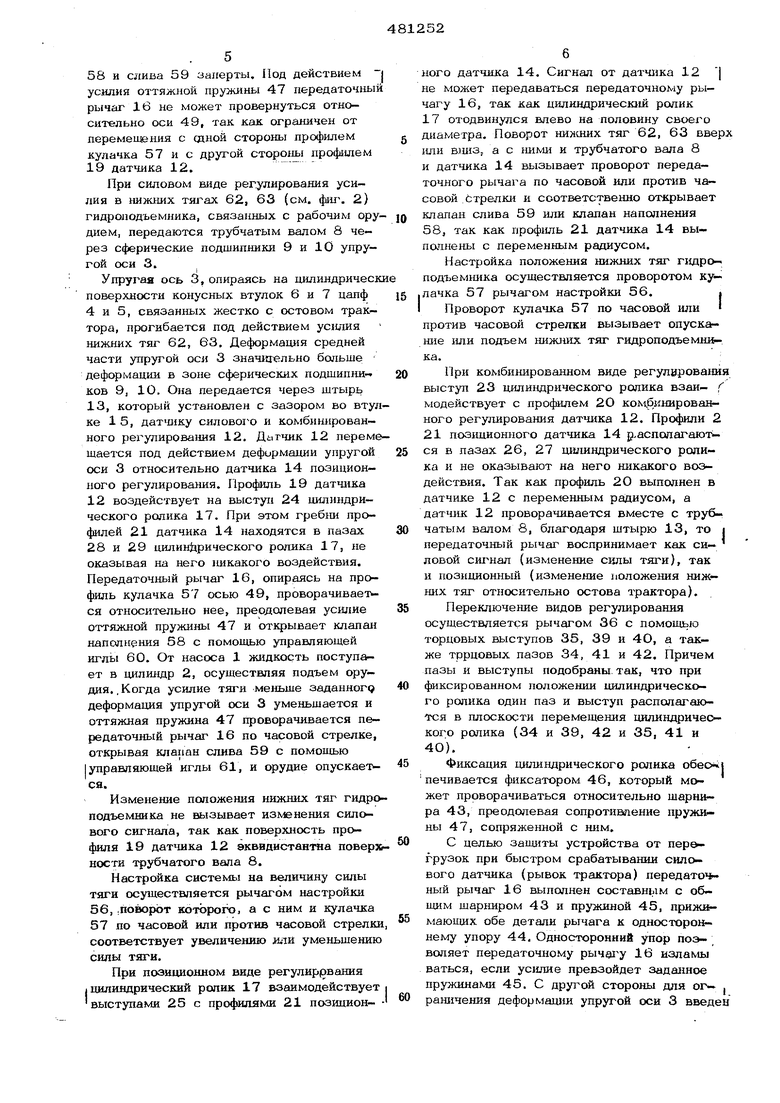
Достигается это благодаря тому, что на упругой оси, установленной в опорах нижней оси .гцдроподъе много механизма щарнирно размещен трубчатый вал, жестко со& диненный с одной из тяг, а на валу расположен корпус с размещенным в нем распределителем, который через передаточный рычаг и цилиндрический ролик связан с датчиками позиционного регулирования и датчико силового и комбинированного регулирования выподнен в виде кулачка с цилиндрической проточкой и соединен с трубчатым; валом, датчик силового и комбинированного регулирования соединен с упругой осью и выполнен в виде скобы, охватывающей цилиндрическую проточку кулачка датчика позидиошюго регулирования, а передаточный рычаг од1шм из концов соединен с распределителем и через цилиндрический ролик с датчиками. Кроме того в системе установлен фикса цилиндрического ролика, вьннмиеины в виде рычага, шарнирно устаноа1енного в прэрези передаточного , соединенного; с оттяжной пружиной; на торце цилиндрического ролика выполнен паз, связанный :через шайбы с выступом валика рычага нерелшючеиия режимоЕ Г ось передаточного |jbi4ara установлена на )8ронштейне, в щеках которого выполнены лазы, причем ось (симметрии пазов совпадает с осью валфса рычага переключения режимов, .а дерфхаточный рычаг размещен меящу ще камщ кронштейна, а так же тем, что передаточный рычаг выполнен составным из деталей с односторонним уггаром, причем дет4пи рычага соединены между собой через {промежуточный шарнир и пружину. Такая система регулирования не имеет органической связи с трактором и не зави сит от его компановки, так как устанавливается взамен нижней оси,,. Она не усложняем конструкцию заднего моста, так как не 1фебует дополнительного объема и Meet крепления, легко монтируе1ч;я и демонтируется и может быть установлена на тракторы, находящиеся в эксхшуатации. На фиг 1 изображена система регулирования гидроподъемно1 о механизма трактора; на фиг, 2 - систек-ш вдоль упругой оси; на фиг, З; - положеш1е цилиндрического ролика при силовом режиме регуз ирования и на фш, 4 - положение цилиндрического ролика при позиционном режиме регулирования. Система автоматического регулирова ния состоит из насоса 1, гидроцштиндра 2 ynpyi ofi оси 3 с цапфами 4 и 5 и конусными втулками 6 и 7, трубчатого вала 8, установленного на упругую ось с помоидью подшипников 9 и Ю, герме корпус lie датчиком силового и комбинированно со регулирования 12, взаимодейстБуюнщм с упрутой осью через штырь 13, и датчик позиционного регулирования 14, установле НОГ0 жестко на трубча-том валу с помощью втулки 15, передаточного рычага 16 с ци ндрическим роликом 17 и распределителя 18. Датчик силового я комбинированного регулирования 12 выполнен в виде скобы с профилем 19 эквидистантным поверхности трубчатого вала 8,.соответствующим cs ловому режиму регулирования и с профипе 20 с перемешагм радиусом относительно оси трубчатого вала 8, соответствующим комбинированному решению регулирования. Датчик позиционного регулирования 14 выполнен в виде кулачка с двумя одинако- профилями 21, с переменным радну- ом относительно оси трубчатого вала 8 ц1-шиндрической йроточкой 22 между проилями. Цилиндрический ролик 17 имеет выступы 3-25, взаимодействующие, соответственно, профилем датчиков регулирования, пазы 6-29, лун1ш 30-32 для фиксация его в одном из видов регулирования, проточку 33, исключающую выпадание цилиндричес-, кого ролика из передаточного рычага, и торцовый паз 34. С торцовым пазом 34 дилшздрического рачика взаимодействует торцовый выступ 35 валика рьгчэга переключения режимов Зб, регулирования через шайбы 37 и 38 , с накрест расположенными торцовыкш I выступами 39 и 4О и пазакш 41 и 42. Передаточный рыча 16 выполнен со- из деталей с промежуточным шарниром 43 и односторон1жми упорами 44j которые прижаты друг к усилием пружины 45, Фиксатор 46 цилиндрическог-о родика расположен в прорези передаточного ры- . чага и соединен с оттяжной пружиной 47. Он имеет выступ 48, который сопрягается с од1ЮЙ из лунок цилиндрического ролика 17. Г1ередаточ1 ьш рычаг имеет ось качения 49 и выфрезеровку 5О, а такжеi щек-И 51, охватывающие профили датчика позиционного регулирования. Ось качания передаточного входит в пазы 52, щек кронщтейна 53, которые обеспечивают его ориентацию. Кронштейн жестко соединен с герметич ным корпусом, например, с помощью щты- ря 54 и валика 55 рыч(1га настройки 56. На валике рычага настройки расположен жестко двухгребневой кулачок 57 настройки, взаимодействуюпшй с осью качения 49 передаточного рычага 16,, Последний с другой стороны сопрш--ается с распределителем 18, например, кл:апанного типа, который состоит из клапана наполнения 58, i клапана слива 59 и управляющих игл 60, 61. Предлагаемая система имеет нижние 62, 63, шарнирно связанные с 1шж ней осью, из которых одна жестко соединена с трубчатым валом, штырь 64, исключающий проворот герметичного корпуса относительно остова трактора, балку 65, связывающую жестко цапфы упругой оси и кольцевые зазоры 66, 67 между трубчатым валом 8 и конусными втулками 6 и 7. На фиг, 1 система автоматического регулирования изображена в нейтральном положении, т.е. когда кпапеты наполнения58 и слива 59 заперты. Под действием усилия оттяжной пружины 47 передаточны рычаг 16 не может провернуться относительно оси 49, так. как ограничен от перемещения с одной стороны профилем кулачка 57 и с другой стороны профшем 19 датчика 12, При силовом виде регулирования усилия в 1шжних тягах 62, 63 (см, фи1 2) гидроподъемника, связанных с рабочим ору дием, передаются трубчатым валом 8 через сферические подшипники 9 и 10 упругой оси 3. Упругая ось 3, опираясь на пилиндрическ поверхности конусных втулок 6 и 7 цапф 4 и 5, связанных жестко с остовом трактора, прогибается под действием усилия нижних тяг 62, 63, Деформащш средней части упругой оси 3 знач1ах льно больше деформации в зоне сферических подшипников 9, 10. Она передается через штырь 13, который установлен с зазором во втул ке 1 5, датш1ку силового и комбишфованного регулирова 1ия 12. Датчик 12 перем щается под действием деформации упругой оси 3 относительно датчика 14 позиционного регулирования. Профиль 19 датчика 12 воздействует на выступ 24 цилиндрического ролика 17. При этом греб1ш профилей 21 датчика 14 находятся в пазах 28 и 29 цилиндрического ролика 17, не оказывая на него 1шкакого воздействия. Передаточный рычш 16, опираясь на профиль кулачка 57 осью 49, проворачивается относительно нее, преодолевая усилие оттяжной пружины 47 и открывает клапан наполнения 68 с помощью управляющей игль 60, От насоса 1 жидкость поступает в цилиндр 2, осуществляя подъем орудия. .Когда усилие тяги меньше заданного деформация упругой оси 3 уменьшается и оттяжная пружина 47 проворачивается передаточный рычаг 16 по часовой стрелке, открывая клапан слива 59 с помощью I управляющей иглы 61, и орудие опускается. Изменение положения нижних тяг гидро подъемника не Шз зывает изк1енения силового сигнала, так как поверхность профиля 19 12 эквидистантна поверз нести трубчатого вала 8, Настройка системы на величину силы тяги осуществляется рычагом настройки 56, .поворот которого, а с ним и кулачка 57 по часовой или против часовой стрелки соответствует увеличению юпн уменьшению силы тяги. При позиционном виде регулир(ования Iцилиндрический ролик 17 взаимодействует выступами 25 с профилями 21 позиционкого датчика 14. Сигнал от датчика 12 | не может передаваться передаточному рычагу 16, так как цилиндрический ролик 17 отодвинулся влево на половину своего диаметра. Поворот низших тяг 62, 63 вверх или В1ШЗ. а с ними и трубчатого вала 8 и датчика 14 вызывает проворот передаточного рычага по часовой или против часовой йтрелкд и соответственно открывает клапан слива 59 или клапан наполнения 58, так как профиль 21 датчика 14 выполнены с переменным радиусом. Настройка положения нижних тяг пщрс подъемника осуществляется проворотом кулачка 57 рычагом настройки 56, Проворот кулачка 57 по часовой или против часовой стрелки вызывает опускэгние ifflH подъем 1шжних тяг гидроподъемника. При комбинированном виде регулнрова1шя выстрт 23 цилиндрического ролика взаи- f модействует с профилем 2О комбинированного регулирования датчика 12. Профили 2 21 позиционного датчика 14 р аспопагают ся в пазах 26, 27 цилиндрического ролика и не оказывают на него никакого воздействия. Так как профиль 2О выполнен в датчике 12 с перемеш1Ь(м радиусом, а датчик 12 проворачивается вместе с трубчатым валом 8, благодаря штырю 13, то i передаточный рычаг воспринимает как си- ловой (изменение силы ), так и позиционный (изменение 11Оложе1Шя нижних тяг относительно остова трактора). Переключение видов регулирования осуществляется рычагом 36 с помощью торцовых выступов 35, 39 и 40, а также тррцовых пазов 34, 41 и 42, Причем пазы и выступы подобраны, так, что при фиксированном положении цилиндрического ролика один паз и выступ располагаюfcs в плоскости перемещения хшлиндричео- кого ролика (34 и 39, 42 и 35, 41 и 4О). Фиксация цилиндрического ролика o6eoi| печивается фиксатором 46, который может проворачиваться относительно шарнира 43, преодолевая сопротивление пружины 47, сопряженной с ним, С целью зашлты устройства от пер&грузок при быстром срабатывании силового датчика (рывок трактора) передаточн ный рычаг 16 выполнен составным с общим шарниром 43 и пружиной 45, прижимающих обе детали рычага к односторо№нему упору 44, Односторонний упор позволяет передаточному рычо1 у 16 изламы ваться, если усилие превзойдет заданное пружинами 45. С стороны для ог ранлчения деформации упругой оси 3 введен кольцевой Зазор 66 и 67 между трубчатым валом 8 и конусными втулками 6 i и. 7. Для ужесточения остова трактора цапфы 4 и 5 могут быть жестко соединены балкой 65. Предмет изобре те и и я 1. Система для регулирования гидроподъем ног4 механизма трактора, содержащая тяги шарфирно соединенные с нижней осью гидро подъемного мехшшзма, насос, подключенны через распределитель к гидроцилиндру, уп ругую ось, датчик силового и комбинированного регулирования, датчик позицио иого регулирования, передаточный рычаг с прорезями и рычаг переключения режимов, на йалике которого выполнены выступы, отличающаяся тем, что, с целью упрощения конструкции, упругая ось установлена в опорах нижней оси гидроподъемнрго мехаиизма и на ней шарнирно раэ мещен трубчатый вал жестко соединенный с одной из тяг, а на валу распоцожен .с размещенным в ней распределителем, который через передаточный рычаг и цилиндрический ролик связан с указанными датчиками, причем датдак позиционного регулирования выполнен в виде кулачка с цилин рической проточкой и соединен с . трубчатым валом, а датчик силового и комбинированного регулирования соединен с упругой осью и выполнен в виде скобы, охватывающей цилиндрическую проточку кулачка датчика позиционного регулирования, а передаточный рычаг одним из концов соединен с распределителем и через цилиндрический ролик с датчиками. 2.Система по п. 1 о т л и ч а ю щ а я с я тем, что в нем установлены оттяжная пружина и фиксатор цилиндрического ролика, выполненный в виде рычага, шарнирно установленного в прорези передаточного рычага, соединенного с оттяжной пружиной. 3.Система по пп. 1и 2, отличают а я с я тем, что на торце цилиндрического ролика выполнен паз, связанный через щайбы с выступом валика рычага переключения режимов. 4.Система по пп. 1-3, отличающая с я тем, что ось передаточного рычага установлена на кронщтейне, в щеках которого Быпол1даны пазы, причем ось симметрии пазов совпадает с осью валика рычага переключения режимов, а передаточный рычаг размещен между щеками крониьтейна. 5.Систему по пп. 1-4, отличающаяся тем, что, с целью защиты распред пителя от перегрузок, передаточ- t ный рычаг выполнен составным из деталей с односторонним упором, причем детали рычага соединены собой через промежуточный шарнир и пружину. 61 58 59 l TrT r ft xvSl Л / 16 54 21 19 201 Z 15 52 9 Фиг 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования положения гидроподъемного механизма навески трактора | 1975 |
|
SU571210A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ НАВЕСНОЙ СИСТЕМОЙ ТРАКТОРА | 1997 |
|
RU2126616C1 |
| ГИДРОРАСПРЕДЕЛИТЕЛЬ РЕГУЛЯТОРА ПОЗИЦИОННО- | 1972 |
|
SU352615A1 |
| Устройство для автоматического управления двигателем и объемной гидропередачей транспортного средства | 1976 |
|
SU768669A1 |
| ПЕРЕКЛЮЧАТЕЛЬ РЕЖИМОВ РЕГУЛИРОВАНИЯ ДЛЯ РЕГУЛЯТОРА ПОЗИЦИОННО-СИЛОВОГОТИПА | 1971 |
|
SU420264A1 |
| УСТРОЙСТВО ДЛЯ СНИЖЕНИЯ БУКСОВАНИЯ ТРАКТОРА С УНИВЕРСАЛЬНОЙ ГИДРОНАВЕСНОЙ СИСТЕМОЙ | 1972 |
|
SU424523A1 |
| Дискретная передача | 1987 |
|
SU1430645A1 |
| Механизм переключения видов регулирования положения навесных орудий и гидроувеличителя сцепного веса трактора | 1976 |
|
SU668637A1 |
| АГРЕГАТ ДЛЯ БЕСКОНТАКТНОГО ИМПУЛЬСНОГО ИНЪЕКТИРОВАНИЯ ЖИДКИХ ВЕЩЕСТВ В ПОЧВУ И ИНЪЕКТОР ЖИДКИХ ВЕЩЕСТВ | 1992 |
|
RU2038731C1 |
| УСТРОЙСТВО ДЛЯ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ НАВЕСНЫМ ОРУДИЕМ | 1972 |
|
SU352616A1 |