1
Изобретение относится к подъемно-транспортному оборудованию.
Известно устройство для съема изделий с подвесного конвейера и передачи их к соответствующему рабочему месту, содержащее радиально-закрепленные на поворотном основании телескопические рычаги с захватами. Синхронизация работы устройства и непрерывно движущегося конвейера достигается взаимодействием упора выдвижной части телескопического рычага с подвеской конвейера.
Цель изобретения - повышение степени синхронизации работы устройства и работы подвесного конвейера.
Для этого поворотное основание установлено на криволинейном участке конвейера и выполнено в виде звездочки, взаимодействующей с тяговой цепью конвейера.
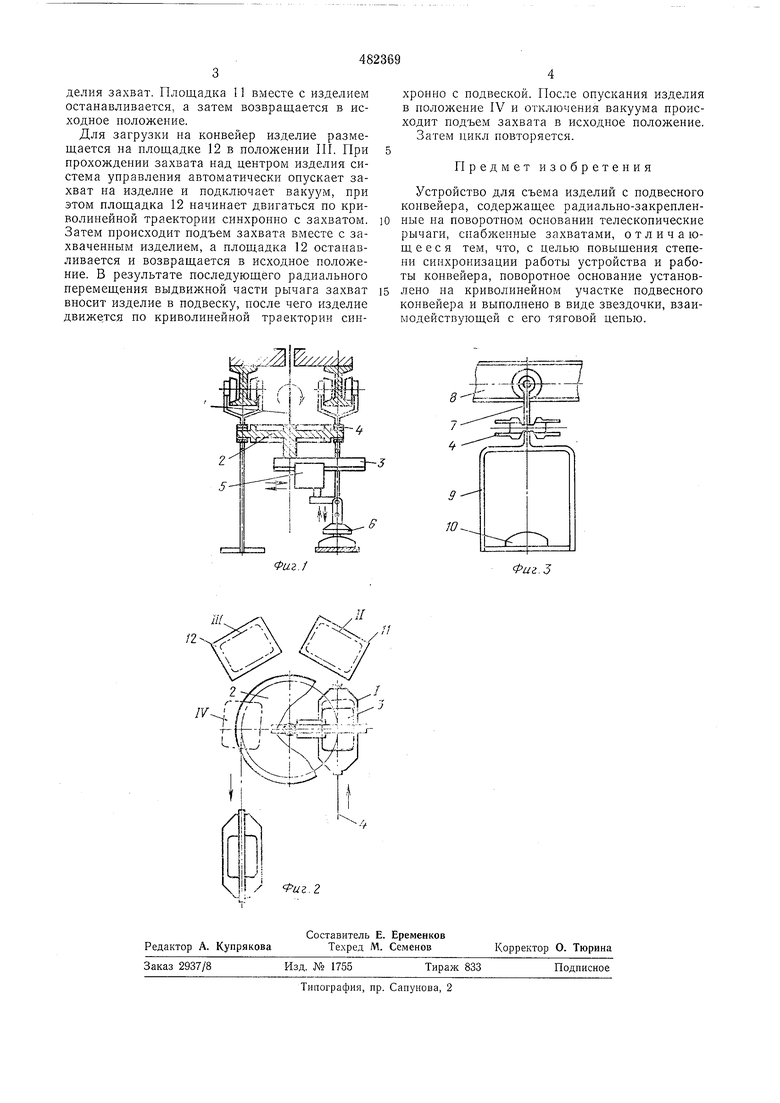
На фиг. 1 и 2 изображено описываемое устройство в двух проекциях (в исполнении с одним рычагом); на фиг. 3 - подвеска конвейера с грузом.
На подвешенной поворотной колонке 1 закреплена звездочка 2, к которой прикреплен телескопический рычаг 3. Тяговая цепь 4 подвесного конвейера, охватывая звездочку 2, приводит ее и рычаг 3 во вращение. Выдвижная часть 5 рычага 3 оборудована подъемно-опускным вакуумным захватом 6. Каретки 7 конвейера, прикрепленные к тяговой цепи, перемещаются по монорельсу 8. К каждой каретке прикреплена подвеска 9, в которой размещается изделие 10, например экран цветного кинескопа. В стороне от конвейера расположены
площадки И и 12. На площадку 11 устанавливается изделие, снятое с конвейера, а площадка 12 предназначена для размещения изделий, загружаемых на конвейер.
Устройство работает следующим образом.
Тяговая цепь 4 конвейера приводит во вращение звездочку 2 и установленный на ней рычаг 3 с захватом 6. С переходом подвески конвейера на крнволинейную траекторию на участке съема захват двигается синхронно с изделием, что создает условия для точного и надежного его захватывания.
Система управления устройства автоматически опускаетзахват на изделие 10, подключает вакуум Н поднимает захват вместе с изделием. После этого выдвижная часть рычага
перемещается в радиальном направлении, в
результате чего захват переносит изделие из
положения I за пределы подвески.
Затем захват переносит изделие к площадке
П. При прохождении изделием положения II над центром площадки захват опускается; при этом площадка двигается по криволинейной траектории синхронно с захватом. После опускания изделия на площадку 11 вакуум отключается, и поднимается освободившийся от из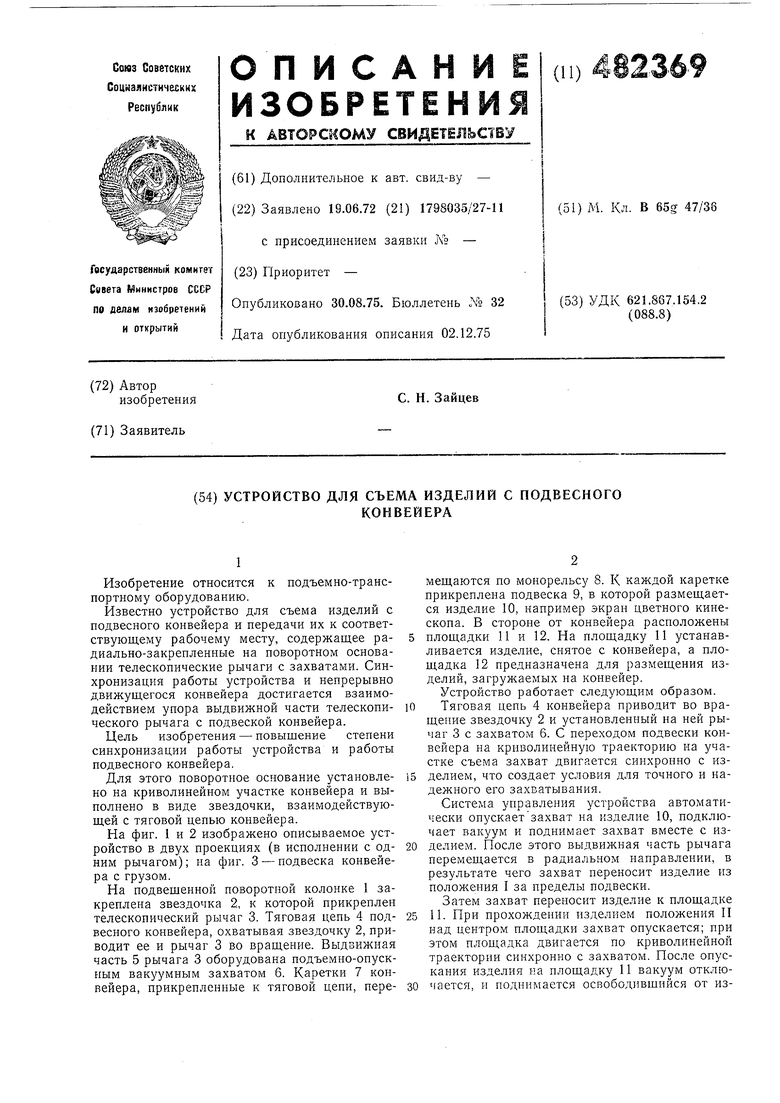
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки подвесного конвейера | 1983 |
|
SU1084212A1 |
| Подвесной конвейер для транспортировки длинномерных грузов | 1981 |
|
SU988682A1 |
| УСТРОЙСТВО для ПЕРЕДАЧИ ШТУЧНЫХ ГРУЗОВ С ОДНОГО ПОДВЕСНОГО КОНВЕЙЕРА НА ДРУГОЙ | 1973 |
|
SU407808A1 |
| Устройство для погрузки и разгрузки тары | 1982 |
|
SU1036633A1 |
| Устройство для перемещения и передачи подвесок с грузами | 1983 |
|
SU1133194A1 |
| ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО | 1966 |
|
SU178737A1 |
| Устройство для загрузки подвесного конвейера | 1983 |
|
SU1152894A1 |
| Устройство для перегрузки изделий с подвесного конвейера | 1986 |
|
SU1468827A1 |
| Подвесной конвейер | 1983 |
|
SU1084192A1 |
| Перегрузочное устройство подвесного конвейера | 1982 |
|
SU1041454A1 |
