Изобретение относится к промышленному транспорту, в частности к устройствам для загрузки и разгрузки многополочных подвесок подвесного грузонесущего конвейера.
Известно устройство для передачи изделий с одного конвейера на другой, эключающее шарнирный параллелограмм с пневмоцилиндром, образованный горизонтальной груэонесущей поверхностью в виде подъемных вил и параллельными шарнирными звеньями снабженными противовесом и установленными на pawe, причем над рамой ниже верхней точки подъема вил установлен наклонный рольганг fl .
Это устройство может быть применено для загрузки и разгрузки многополочных подвесок подвесного грузонесущего конвейера. Однако в силу того, что подъемные вилы перемещаются по незамкнутой дуговой траектории, то после загрузки полки подвески они могут вернуться в исходно положение только в промелсутке между подвесками. В исходном положениина вилы подается загружаемое изделие, и лишь после этого устройство готово к новс1му- загрузочному циклу. Поэтому применение устройства многополочными подвесками грузонесуиаго конвейера не может гарантировать загрузку .(разгрузку) подряд каждой подвески, а также требует расстояния между подвесками значительно превышающего соответствующий габарит ГРУзонесущейповерхности (.подъемных вил, что веде к понижению емкости конвейера и к завышению его скорости.
Наиболее близким к изобретению по технической-сущности и достигаемому результату является перегрузочное устройство подвесного конвейера, включающее установленные на корпусе поворотные ведущий и ведомый шатуны, ведущий из которых связан, с кривошипом, и гарнирно соединенную с шатунами грузовую площадку C2J.
Недостаток известного устройства заключается в перемещении грузовой площадки по круговой траектории, что увеличивает габариты, занимаемы устройством. Кроме того, такая траектория..предусматривает захват, перемещение и съем изделий грузовой площадкой с одной скоростью. Это приводит к повреждению изделий и снижению нa жнocти их передачи.
Целью изобретения является сни-i жение повреждений изделий и заниMaeNbJX площадей.
Поставленная цель достигается тем, что в перегрузочном устройстве , включающе М установленные на корпусеповоротные ведущий и ведо-: мни шатуны, из которых ведущий связан с кривошипом привода, а тарнирно соединенную с шатунами грузовую площадку, ведомый шатун выполнен Г-образной формы, а нижние концы шатунов установлены на корпусе посредством приспособления CHVixpoHHoro вертикального перемещения, выполненного в виде шарнирно соединенных с корпусом параллел1 ных рычагов и подвижного звена с которым шарнирно связаны шатуны и параллельные рычаги.
Кроме того, грузовая площадка выполнена L, -образной формы.
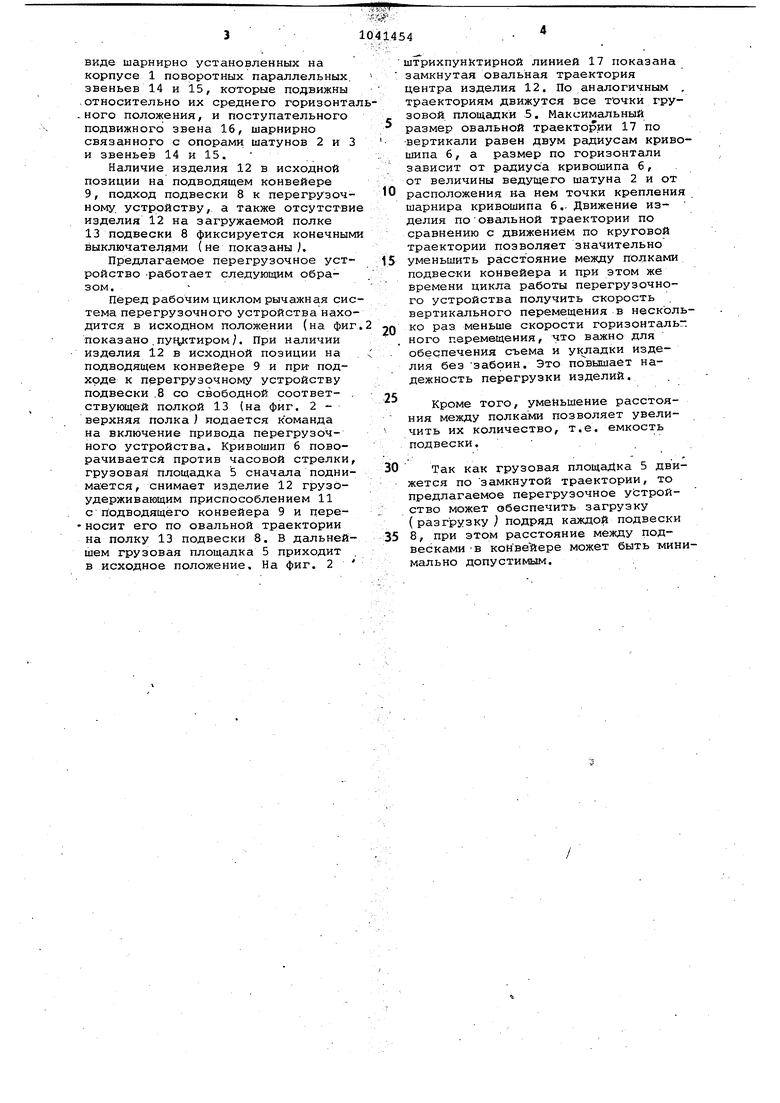
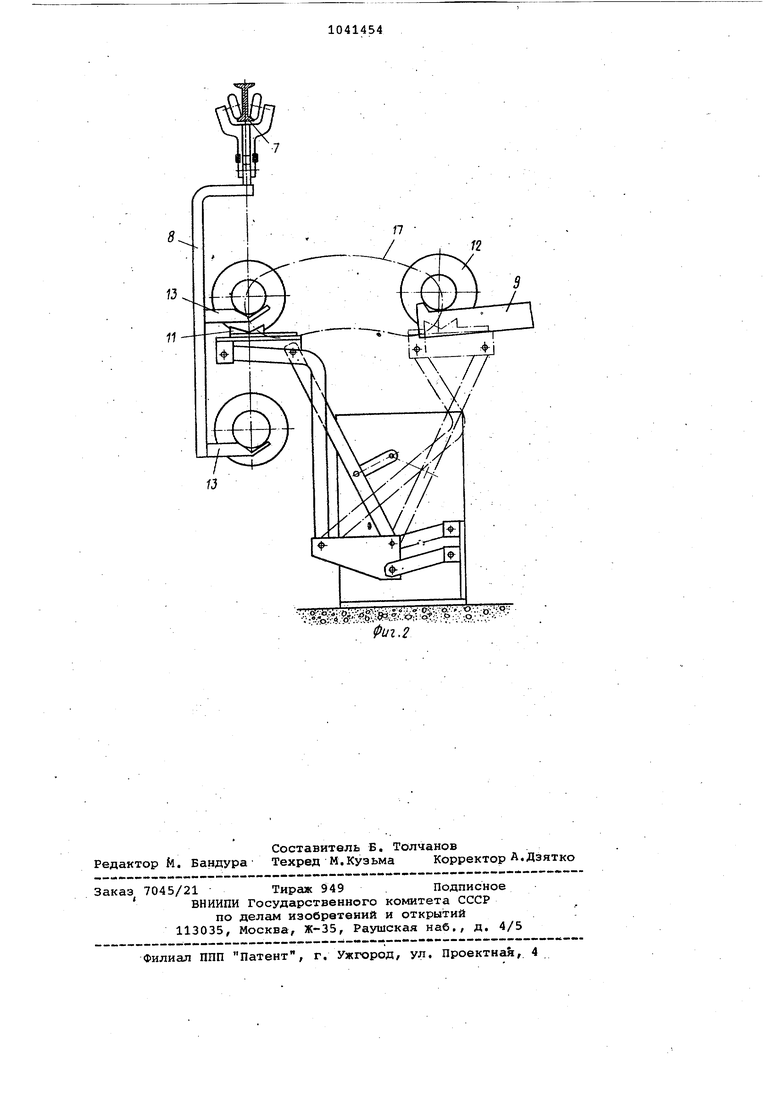
На Фиг. 1 показано перегрузочное устройство, общий вид; на фиг,2взаимодействие перегрузочного устройства с многополочной подвеской грузонесущего кон-вейера.
Перегрузочное устройство представляет собой корпус 1, на котором смонтированы ведущий 2 и ведомый 3 шатуны, шарнирно опирающиеся нижним концами на приспособление 4 их синхронного вертикального перемещения. На верхних концах шатунов 2 и 3 шарнирно укреплена грузовая площадка 5. Внутри корпуса 1 смонтирован электромеханический привод (не показан, который при помощи кривошипа 6 кинематически связан с ведущим шатуном 2. Перегрузочное устройство устанавливается между загружаемым подвесным грузонесущим конвейером 7 с многополочными I,подвесками 8 и подводящим конвейе pjM 9, играющим роль накопителя.На фиг. 2 для примера показана двухполочная подвеска. В зтом положении перегрузочное устройгство при реверсе может и разгружать грузонесущий конвейер. Грузовая площадка 5 имеет L -образную форму и снабжена отверстиями 10 длякрепления грузрудерживающего приспособления 11.
Такая форма грузовой площадки 5 позволяет конструктивно легко ее опереть на три точки, причем две из них в виде двух соосных шарниров ( подшипников )расположены в верхнем конце ведущего шатуна 2. А полученный вырез грузовой площадки 5 дает возможность расположить в нем выступающую часть перегружаемого изделия 12. Это уменьшает суммарный вертикальный габарит грузовой площадки 5, грузоудерживсиощего приспосрбления 11 и изделия 12, что поз- воляет соответственно уменьшить и расстояние между полками 13 подвески.8. Ведомый шатун 3 выполнен Г-образной формы для-огибания полок 13 подвески 8 при перегрузi e. С целью простоты, и надежносгти кс струкции приспособление 4 синхронного вертикального перемещения нижних концов шатунов 2-и 3,выполнено в
виде шарнирно установленных на корпусе 1 поворотных параллельных. звеньев 14 и 15, которые подвижны .относительно их среднего горизонта.ного положения, и поступательного подвижного звена 16, шарнирно связанного с опорами шатунов 2 и 3 и звеньев 14 и 15.
Наличие изделия 12 в исходной позиции на подводящем конвейере 9, подход подвески 8 к перегрузочному, устройству, а также отсутстви изделия 12 на загружаемой полке 13 подвески 8 фиксируется конечным выключателями (не показаны/.
Предлагаемое перегрузочное устройство -работает следующим образом. Перед рабочим циклом рычажная система перегрузочного устройства находится в исходном положении (на фиг показано .пуЕустиром. При наличии изделия 12 в исходной позиции на подводящем конвейере 9 и при- подходе к перегрузочному устройству подвески .8 со свободной соответ- , ствующей полкой 13 (на фиг. 2 верхняя полка ) подается команда на включение привода перегрузочного устройства. Кривошип 6 поворачивается против часовой стрелки, грузовая площадка 5 сначала поднимается, снимает изделие 12 грузоудерживающим приспособлением 11 с подводящего конвейера 9 и переносит его по овальной траектории на полку 13 подвески 8. В дальнейшем грузовая площадка 5 приходит . в исходное положение. На фиг. 2
штрихпунктирной линией 17 показана замкнутая овальная траектория центра изделия 12. По аналогичным , траекториям движутся все точки грузовой площадки 5. Максимальный размер овальной траектории 17 по вертикали равен двум радиусам кривошипа 6, а размер по горизонтали зависит от радиуса кривошипа 6, от величины ведущего шатуна 2 и от расположения на нем точки крепления шарнира кривошипа 6.. Движение изделия по овальной траектории по сравнению с движением по круговой траектории позволяет значительно уменьшить расстояние между полками подвески конвейера и при этом же времени цикла работы перегрузочного устройства получить стсорость вертикального перемещения в несколько раз меньше скорости горизонтальг. ного перемещения, что важно для обеспечения съема и ук ладки изделия без -забоин. Это повьлшает надежность перегрузки изделий.
Кроме того, уменьшение расстояния между полками позволяет увеличить их количество, т.е. емкость подвески.
Так как грузовая площадка 5 движется по замкнутой траектории, то предлагаемое перегрузочное устройство может обеспечить загрузку ( разгрузку ) подряд каждой подвески 35 8, при этом расстояние между подвесками -в конвейере может быть минимально допустимым.
Щ :ЙЖ « ; ЩЩ§:-:: - 12ijz.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки изделий с подвесного грузонесущего конвейера | 1975 |
|
SU655610A1 |
| ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО | 1966 |
|
SU178737A1 |
| Скороморозильный аппарат | 1989 |
|
SU1735685A1 |
| Устройство для загрузки изделий на подвесной конвейер | 1983 |
|
SU1159849A1 |
| Устройство для приема от пресса свежеотформованных изделий | 1972 |
|
SU443769A1 |
| Подвеска подвесного конвейера | 1980 |
|
SU933563A1 |
| Установка для перемещения керамических отформованных изделий | 1990 |
|
SU1791136A1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2005 |
|
RU2294879C1 |
| Устройство для автоматической передачи изделий круглой формы с отверстием | 1976 |
|
SU656936A1 |
| Шаговый конвейер | 1979 |
|
SU804550A1 |
1. ПЕРЕГРУЗОЧНОЕ УСТРОЙСТ- . ВО ПОДВЕСНОГО КОНВЕЙЕРА; Включающее установленные на корпусе поворотные , ведущий и ведомый шатуны, из которых ведущий связан с кривошипом привода, и шарнирно соединенную с шатунами грузовую площадку., о т л и-чающееся тем, что, с целью снижения повреждений изделий и занимаемых площадей, ведомый шатун выполнен Г -образной формы, а нижние концы шатун-ов уртановлены на корпусе посредством приспособления синхронного вертикального перемещения, выполненного в виде шарнирно соединенных с корпусом параллельных рычагов, и подвижного звена, с, которым шарнирно связаны шатуны и параллельные рычаги. - Я 2. Устройство по п. 1, о т л .и чающееся тем, что грузовая площадка выполнена L, -образной формы. |i СЛ Ф 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для передачи изделий с одного конвейера на другой | 1975 |
|
SU565866A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ивановский К.Е, и др | |||
| Перегрузочные устройства конвейерных штучных грузов | |||
| М., Машиностроение / 1966, с | |||
| Клапанный регулятор для паровозов | 1919 |
|
SU103A1 |
