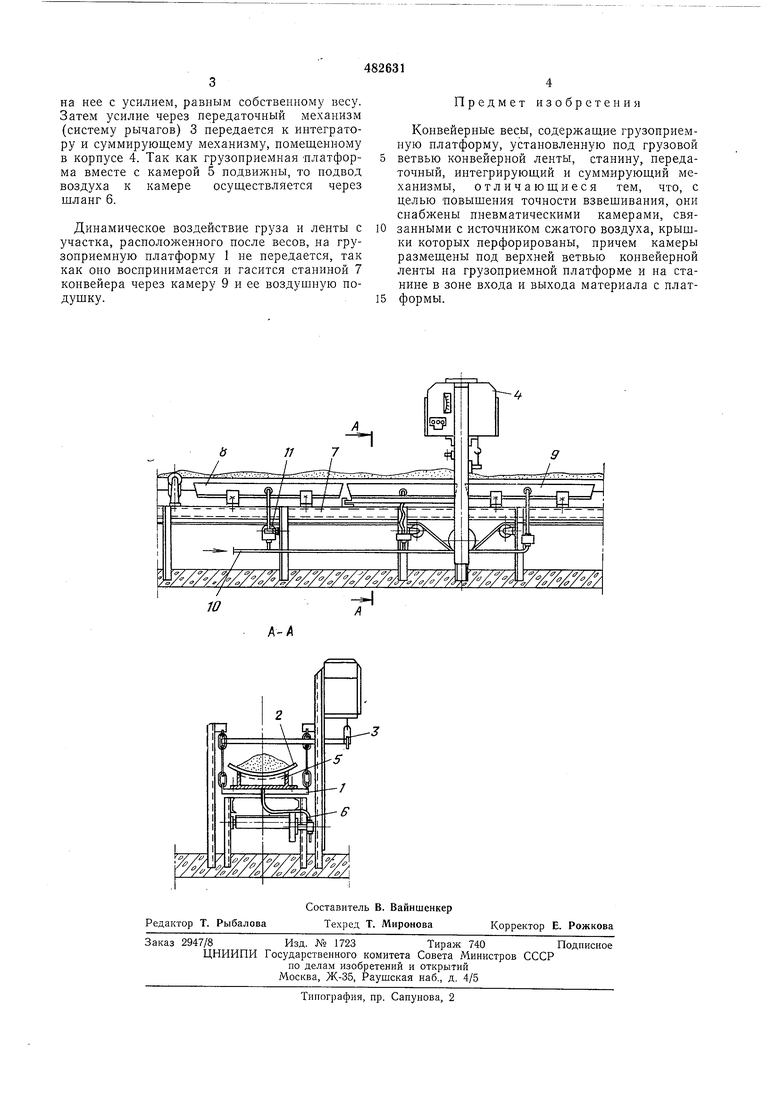
на нее с усилнем, равным собственному весу. Затем усилие через нередаточный механизм (систему рычагов) 3 передается к интегратору и суммирующему механизму, помещенному в корпусе 4. Так как грузоприемная платформа вместе с камерой 5 подвижны, то нодвод воздуха к камере осуществляется через шланг 6.
Динамическое воздействие груза и ленты с участка, расположенного после весов, на грузоприемную платформу 1 не передается, так как оно воспринимается и гасится станиной 7 конвейера через камеру 9 и ее воздушную подушку.
Предмет изобретения
Конвейерные весы, содержащие грузоприемную платформу, установленную под грузовой
ветвью конвейерной ленты, станину, передаточный, интегрирующий и суммирующий механизмы, отличающиеся тем, что, с целью повышения точности взвешивания, они снабжены пневматическими камерами, связанными с источником сжатого воздуха, крышки которых перфорированы, причем камеры размешены под верхней ветвью конвейерной ленты на грузоприемной платформе и на станине в зоне входа и выхода материала с платформы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Конвейерные весы | 1983 |
|
SU1137327A1 |
| Конвейерные весы | 1987 |
|
SU1569574A1 |
| Весоизмерительное устройство | 1979 |
|
SU885816A1 |
| Автоматические конвейерные весы | 1987 |
|
SU1548670A1 |
| КОНВЕЙЕРНЫЕ ВЕСЫ | 2002 |
|
RU2232979C2 |
| Конвейерные весы | 1990 |
|
SU1735723A1 |
| Конвейерные весы | 1982 |
|
SU1242717A1 |
| КОНВЕЙЕРНЫЕ ВЕСЫ, ЗАЩИЩЕННЫЕ ОТ УДАРНЫХ ВОЗДЕЙСТВИЙ ТРАНСПОРТИРУЕМОГО ГРУЗА | 2003 |
|
RU2247335C1 |
| Конвейерные весы | 1980 |
|
SU885817A1 |
| Способ поверки конвейерных весов | 1989 |
|
SU1663445A1 |
