1
Изобретение относится к грузоподъемным средствам.
Известны гидравлические подъемники для подачи грузов на канатную дорогу, содержащие каретку с поворотной головкой, перемещаемые по вертикальным направляющим посредством гидроцилиндра подъема с полиспастом, и вилочный захват.
Целью изобретения является автоматическое слежение за транспортировкой груза и повышение надежности работы. Для этого в предлагаемом подъемнике смонтированы вертикальная поворотная щтанга, кинематически соединенная с гидравлическим приводом поворота, расположенным в нижней опоре, и с поворотной головкой посредством кулачковой муфты, одна из поло-вин которой жестко прикреплена к поворотной головке, а другая подвижно установлена на поршне гидроцилиндра, встроенного в верхнем конце ве|ртикальной поворотной штанги, при этом трубопровод подачи рабочей жидкости в гидроцилиндр установлен внутри штанги.
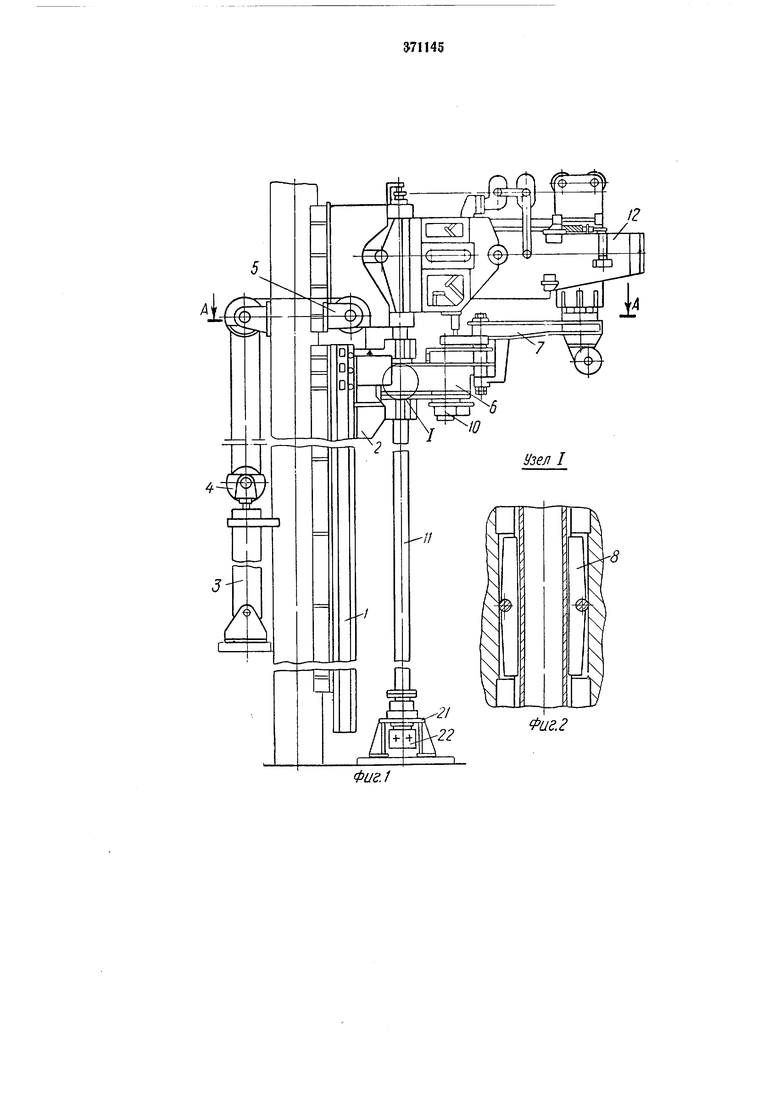
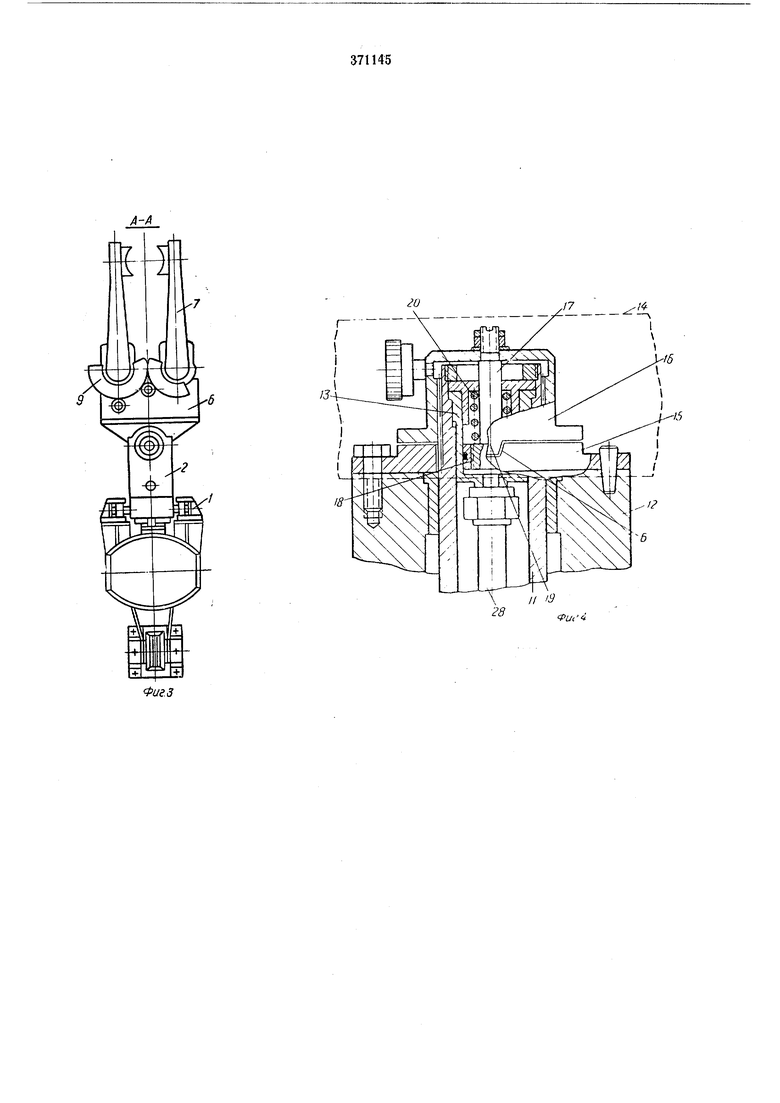
На фиг. 1 изображен описываемый подъемник, вид сбоку; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - разрез по А-А на фиг. 1; на фиг. 4 - разрез по оси гидроцилиндра муфты слежения; на фиг. 5 - разрез по оси нижней опоры поворотной штанги.
Гидравлический подъемник содержит вертикальные направляющие /, на которых установлена каретка 2. Последняя кинематически соединена с гидроцилиндром 3 подъема посредством полиспаста 4, свободный конец которого пропущен через блок 5 и закреплен на каретке 2. Вилочный захват 6, закрепленный в подшипниках каретки, оборудован рычагами 7 для захвата и удержания груза и двумя самоустанавливающимися шпонками 8. Сведение и разведение рычагов 7, связанных зубчатыми секторами 9, осуществляется электродвигателем с червячным редуктором 10.
Через захват 6 пропуш,ена поворотная
5 штанга // с шпоночными пазами, взаимодействующими с шпонкамн 8. Верхний конец штанги вставлен в подшипниковую опору
12 и служит осью
поворотной головки штанги 11 располо0 поворота. Внутри 13 для управления жен гидроцилиндр 14. Одна из полокулачковой муфтой вин 15 муфты жестко закреплена на головке 12, а другая половина 16 находится на штоке 17 поршня 18 и имеет подвижное шлицевое
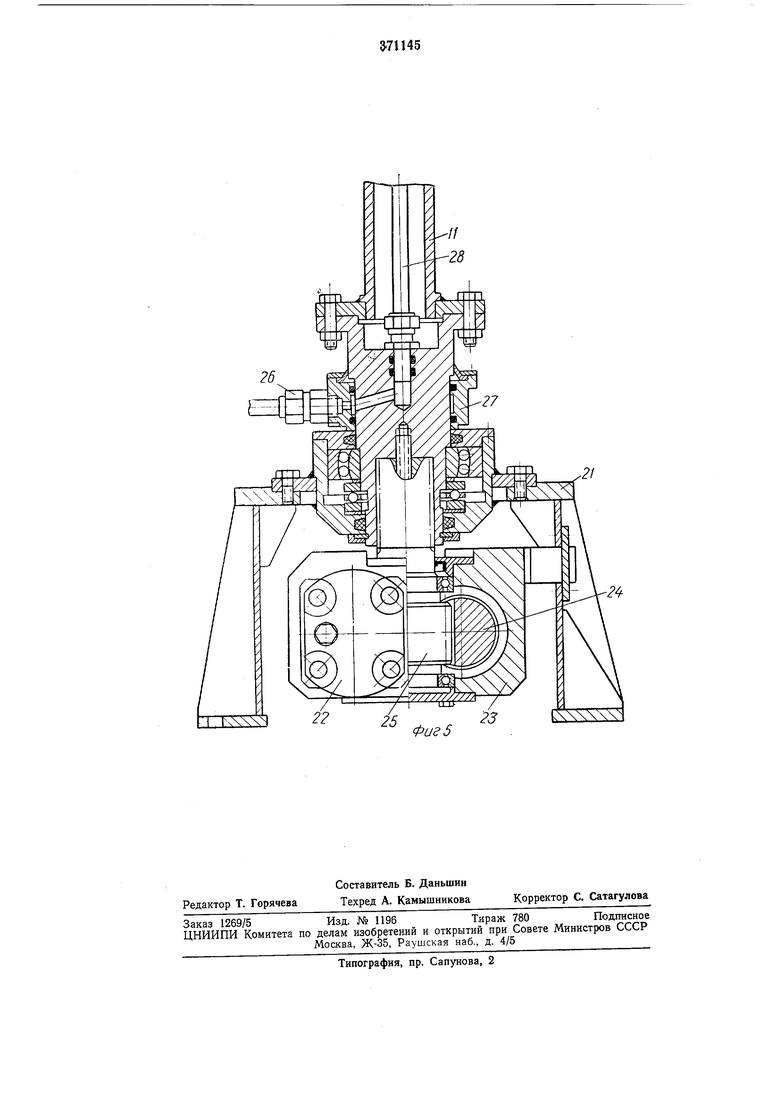
5 соединение с верхним концом штанги //. Половина 15 муфты имеет кулачок 19, а половина 16 - паз Б. Поршень поджат пружиной 20. В основании штанги расположена нижняя опора 21 с гидравлическим приво0
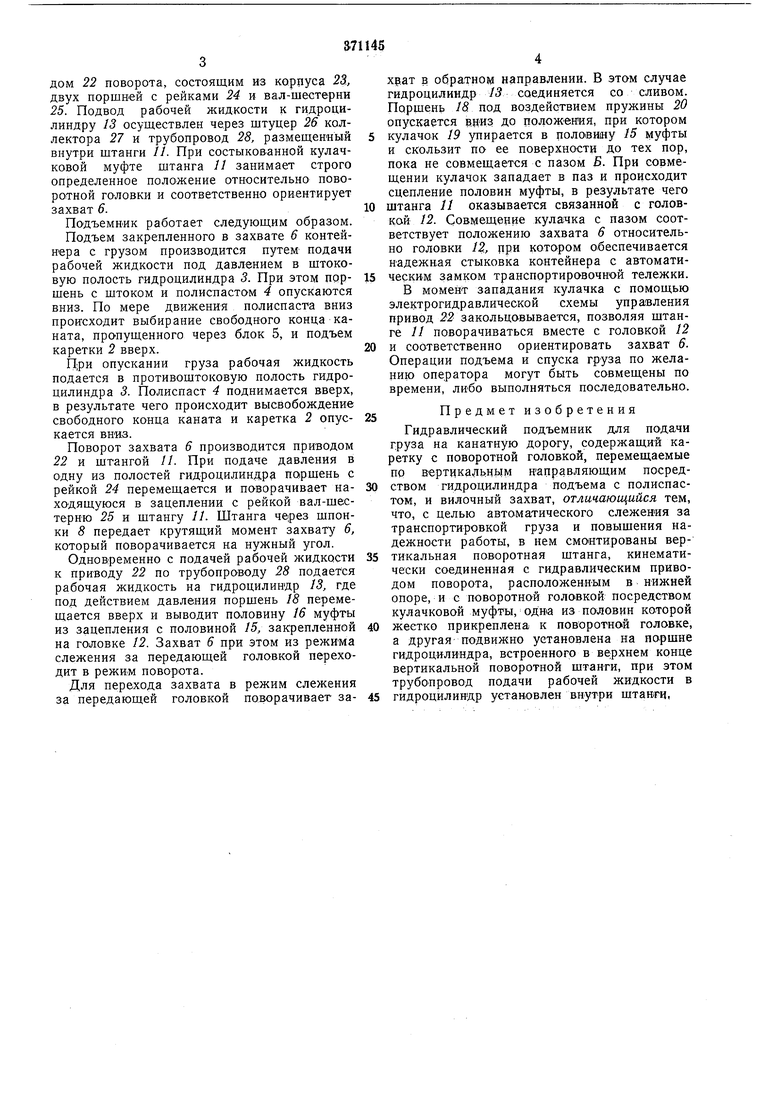
дом 22 поворота, состоящим из корпуса 23,, двух поршней с рейками 24 и вал-шестерни 25. Подвод рабочей жидкости к гидроцилиндру 13 осуществлен через щтуцер 26 коллектора 27 и трубопровод 28, размещенный внутри штанги 11. При состыкованной кулачковой муфте штанга // занимает строго определенное положение относительно поворотной го-ловки и соответственно ориентирует захват 6.
Подъемник работает следующим образом.
Подъем закрепленного в захвате 6 контейнера с грузом производится путем подачи рабочей жидкости под давлением в штоковую полость гидроцилиндра 3. При этом поршень с штоком и полиспастом 4 опускаются вниз. По мере движения полиспаста вниз происходит выбирание свободного конца каната, пропущенного через блок 5, и подъем каретки 2 вверх.
При опускании груза рабочая жидкость подается в противощтоковую полость гидроцилиндра 3. Полиспаст 4 поднимается вверх, в результате чего происходит высвобождение свободного конца каната и каретка 2 опускается вниз.
Поворот захвата 6 производится приводом 22 и штангой 11. При подаче давления в одну из полостей гидроцилиндрэ П0|ршень С рейкой 24 перемещается и поворачивает находящуюся в зацеплении с рейкой вал-щестерню 25 и штангу //. Штанга через шпонки 8 передает крутящий момент захвату 6, который поворачивается на нужный угол.
Одновременно с подачей рабочей жидкости к приводу 22 по трубопроводу 28 подаемся рабочая жидкость на гидроцилиндр 13, где под действием давления поршень 18 перемещается вверх и выводит половину 16 муфты из зацепления с половиной 15, закрепленной на головке 12. Захват 6 при этом из режима слежения за передающей головкой переходит в режим поворота.
Для перехода захвата в режим слежения за передающей головкой поворачивает захр.ат в обратном направлении. В этом случае гидроцилиндр /5 соединяется со сливом. Поршень /8 под воздействием пружины 20 опускается вн«з до положения, при котором кулачок 19 упирается в половину 15 муфты и скользит по ее поверхности до тех пор, пока не совмещается с пазом В. При совмещении кулачок западает в паз и происходит сцепление половин муфты, в результате чего
штанга // оказывается связанной с головкой 12. Совмещение кулачка с пазом соответствует положению захвата 6 относительно головки 12., при котором обеспечивается надежная стыковка контейнера с автоматическим замком транспортировочной тележки. В момент западания кулачка с помощью электрогидравлической схемы управления привод 22 закольцовывается, позволяя штанге // поворачиваться вместе с головкой 12
и соответственно ориентировать захват 6. Операции подъема и спуска груза по желанию оператора могут быть совмещены по времени, либо выполняться последовательно.
Предмет изобретения
Гидравлический подъемник для подачи груза на канатную дорогу, содержащий каретку с поворотной головкой, перемещаемые по вертикальным нацравляющим посредством гидроцилиндра подъема с полиспастом, и вилочный захват, отличающийся тем, что, с целью автоматического слежения за транспортировкой груза и повышения надежности работы, в нем смонтированы вертикальная поворотная щтанга, кинематически соединенная с гидравлическим приводом поворота, расположенным в нижней опоре, и с поворотной головкой посредством кулачковой муфты, одва из половин которой
жестко прикреплена к поворотной головке, а другая подвижно установлена на поршне гидроцилиндра, встроенного в верхнем конце вертикальной поворотной щтанги, при этом трубопровод подачи рабочей жидкости в
гидроцилиндр установлен внутри штанги,
Фид.1
xl-xl
-t6
fU(.t
21
Фиг 5
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический подъемник для приемапередачи груза с канатной дороги | 1972 |
|
SU483340A1 |
| Гидроподъемник для приема передачи груза с канатной дороги | 1976 |
|
SU686935A1 |
| Башенный кран | 1978 |
|
SU775043A1 |
| САМОХОДНАЯ МАШИНА ДЛЯ ТРАНСПОРТИРОВКИ И СМЕНЫ БОЙКОВ И ШТАМПОВ | 1972 |
|
SU329936A1 |
| Поворотное устройство вилочного захвата погрузчика | 1982 |
|
SU1041507A1 |
| УСТРОЙСТВО для ВУЛКАНИЗАЦИИ РЕЗИНОВОГО НИЗАНА ОБУВИ | 1965 |
|
SU170333A1 |
| Полуавтомат для чистки валяной обуви | 1961 |
|
SU150636A1 |
| СТАНОК ДЛЯ УПАКОВКИ кип БУМАГИ В ЩИТКИ | 1966 |
|
SU189737A1 |
| Устройство для многоколенной пространственной гибки труб | 1985 |
|
SU1268245A1 |
| Механизм вертикального перемещения грузоподъемника крана-штабелера | 1989 |
|
SU1677020A1 |