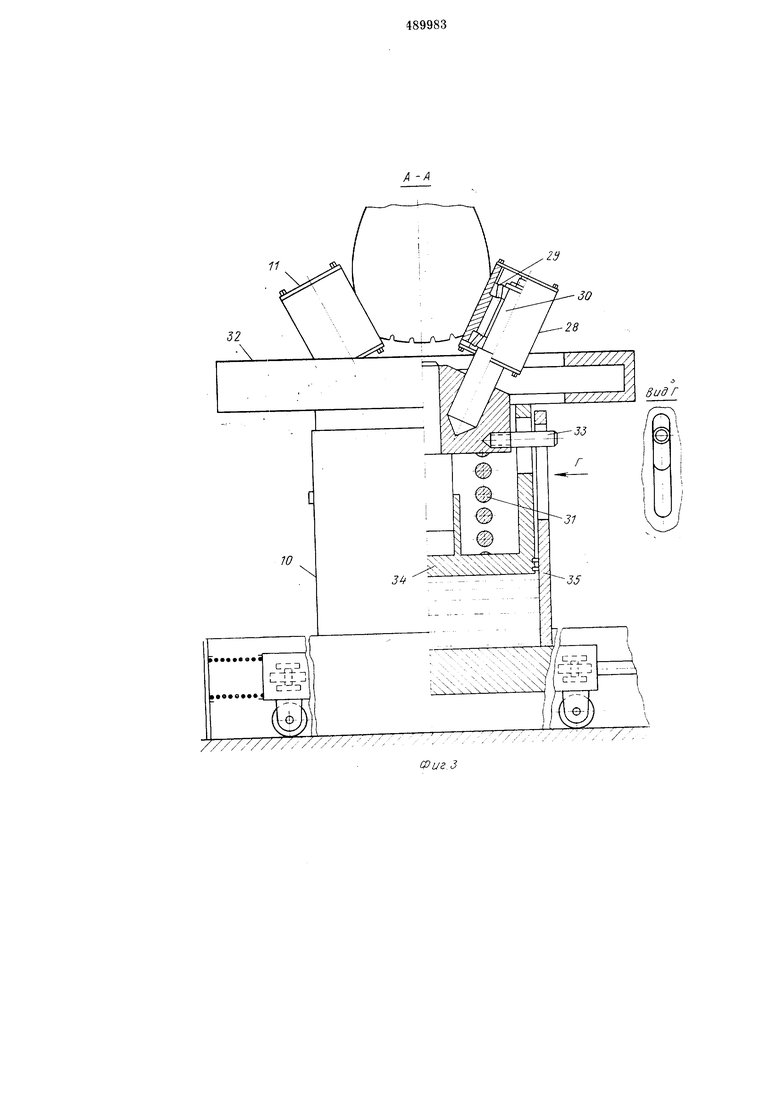
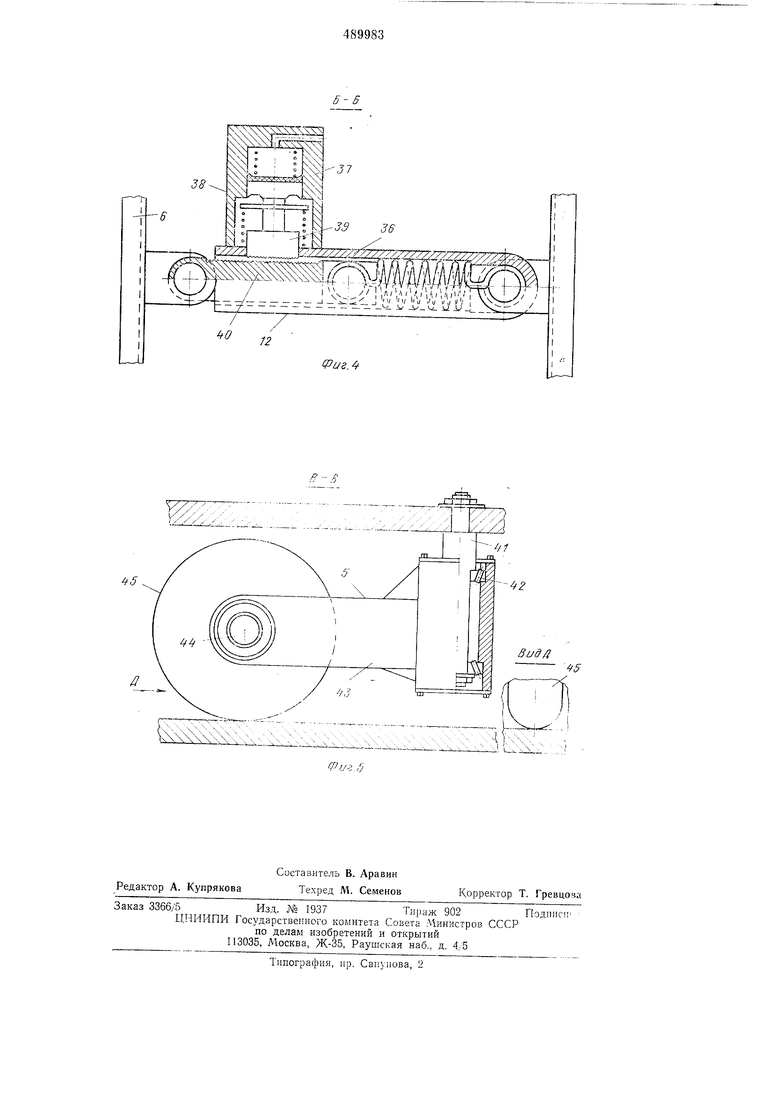
подъемники 10 с подпружиисииыми роликовыми вилками 11 (см. фиг. 3). Между иодвижиыми тележками 15 и станиной 1 установлены пружины 18. Инерцнонныс барабаны 2 расноложсны на валу 19. Инерцноипыс барабаны сосдннсны между собой кардан 10Й нС()сдачей, состоиним из раздвижного пала 20 и И1арннро: 21 рагных угловых скоростей. Пары инерционных барабанов 2 и 7 кинсматическн связаны между собой носрсдство.м раздвижного вала 22, шарниров 21 paBiibix угловых скоростей и двух пар кони-- сск;1х шестерен 23. Каждый на ноддержнваюи1,их барабанов 3 снабжен стонориым устройством из вала 24, зубчатой шестерни 25 и стонорного гнд)оннлиндра 26, установленного на станнне 1 и содержаш,его подиружиненный норшень 27. Поднружиненная роликовая вилка 11 содержит ролики 28, уста}ювленные на нодшипииках 29, размендениых на налвиах 30. Конструктивно каждая нодиружииенная роликовая вилка 11 совместно с нружниой 31 объединена в одни узел с оиорной площадкой 32 вертикального иодъемника 10, установленного соответственно на подвижной тележке 15, между беговыми барабанами 2 и 3 и на нодвнжной платформе 6, между беговвьмн барабанами 7 и 8. От проворачивания вилка И зафикеирована ирн иомоидн штифта 33, входящего в вертикальные прорези, выполиенные в поршие 34 и цилиндре 35 вертикального гидроподъемника 10 (ем. фиг. 3). Подвижиые платформы 6 связаны со стаиииой 1 раздвижиыми тягами 12, концы которых закреплены шарнирно (см. фиг. 4). На трубе 36 каждой тяги установлен стопор 37, содержащий гндроцилиндр 38, рифлеиная новерхноеть подпружиненного норшня 39 которого взаимодейетвует е рифленной поверхностью штока 40. Каждая роликовая опора содержит жестко ирнкрепленную к платформе 6 вертикальную оеь 41, на которой на нодшниииках 42 установлена вилка 43 е поперечиой осью 44, сиабжеииой опорньш роликом 45, имеющим сферическую наружную новерхиоеть (ем. фиг. 5). Для подачи кома.ид во.тителю в процессе иепытаннй етенд оборудован световым табло (на чертежах «е показано), управлепие еигнализацией которого выиеееио на нульт управления етеидом. В завиеимоети от целей и программы испытаний етенд оборудуетея датчиками и указ г :1телями параметров двнження автомобнля, уетройетвами для регистрации этих параметров, а также устройствами, позволяюш,ими сравнивать время н характер сигиалов CBL-TOвого табло е временем и характером параметров «движения (на чертежах не показаны. Работает опиеанный стенд следующим образом. Автомобиль перед заездом на стенд проходит мойку, еушку, у него проверяется и доводнтся до нормы давление воздуха в шннах всех колее. По еледам колес нрн прямолинейном проезде но площад1;е с чистым и гладки.м покрытием у автомобиля проверяется иерекос :,1остов, приводящий к несовпадению колен нередних и задиих колес, причем несовпадение колеи более, чем иа половнну ширины ноперечпого профиля П1ины, не допускается во нзбежанне иоломкн роликовых вилок для зад1П-1Х колес. Испытательный етенд перед заездом автомобнля приводится в исходное иоложение. ;Тля этого оператор е нульта управления включает ириводы вертикальных нодъемников 10 и етопориых гидроцилиндров 26 и 38, в результате чего подъемные площадки 32 совмеетно е нодпружинеиными ролнковыми внлкамн 11 крайнее верхнее ноложеиие, а поддерживающие беговые барабаны 3 блокнруютея. При этом подпружииенные раздвнжиые стонорные тяги 12 также блокируются, фиксируя подвижные платформы 6 в исходиом положении. После окоичания подготовительных работ автомобиль по эстакадам 4 и 9 заезжает иа стеид, колеса автомобиля останавливаются иа опорных площадках 32 между беговыми барабаиа: 1и стенда. При этом, если колея передних колес не совпадает е колеей задних колее, то подпружиненные роликовые вилки 11 иа нодвижиых тележках 15 под действием наезжающих колес перемещаютея в поперечном наиравлении, преодолевая еопротивлеиие нружин 18. Одновременно е STHA-J под дейетвием вееа наезжающих колее автомобиля подпружиненные роликовые вилки 11 в прорезях подъемных площадок 32 перемещаются вниз, преодолевая сопротивление пружин 3. Оператор с пульта управления выключает приводы вертикальных подъемников 10 и гндроцилиндров 26 и 38. В результате этого прекращаетея блокировка поддерживающих барабанов 3 и подпружиненных раздвижных стопорных тяг 12. Под дейетвием веса колеса автомооиля совместпо е роликовыми вилками 11 ог1ускаются до унора в опорные иоверхноетп беговых барабанов. При этом под действием чаетп весовой нагрузки, передаваемой через роликовые внлки 11 и пружины 31, подъемные площадки 32 еовмеетно с поршнями 34 опускаются до ynojia в днища цилиндров н выходят из контакта с колесами. Одновременно с барабаны 7 и 8 Енжных нлатформах 6 совмеетно с ными эстакадами 9 еамоуетанавливаютея но правляемым колесам автомобнля. По сигналу оператора воднтель включает сред.ачу и начннает «двнжение. При этом 1ра;ценне от ведундих зад.них колес автомоиля через инерциоииые барабаны 2, вал 19, ары коннческнх шестерен 23, раздвижные алы 20 н 22, шарниры 21 равных угловых коростей, инерционные барабаны 7 передатся на ведомые нередние колеса.
По сигналам светового табло водитель осуществляет разгон, переключение передач, торможение, движеине задним ходом и поворот рулевого колеса. При этом инерционные массы, заключенные в беговых барабанах 2 и 7, обеспечивают динамику движения такую же, как на реальной дороге, а поперечные реакции беговых барабанов 7 и 8, возникающие при отклонении плоскости качения колеса от плоскости качения бегового барабана, обеспечивают поворот беговых барабанов 7 и 8 на подвижных платформах 6 синхронно с поворотом управляемых колес.
В процессе испытаний снимаются и фиксируются показания датчиков параметров «движения автомобиля, по которым судят о состоянии автомобиля и изменении этого состояния в течение испытаний.
В случае использования испытательного стенда в качестве тренажера для нроверки и обучения водителей по показаниям устройства, сопоставляющего время и характер задачи для водителя (сигнал светового табло) с временем и характером фактического выполнения этой задачи (параметры «движения), можно судить о качестве управления автомобиля водителем.
После окончания испытаний оператор с пульта управления включает приводы вертикальных подъемников 10 и стопорящих порщней 27 и 39. Стенд переводится в исходное поло ;-;ение, и автомобиль съезжает с него своим ходом.
После съезда автомобиля роликовые вилки И для задних колес под действием пружин 18 занимают первоначальное положение.
Для перевода подвижных платформ 6 в первоначальное положение оператор кратковременно выключает гидроцилиндры 38. В результате этого стопорные тяги 12 разблокируются, и под действием пружин подвижные платформы 6 занимают первоначальное положение.
15
Предмет изобретения
Стенд для пспытання автомобилей, содержащий станину и установленные на ней нонарно беговые барабаны, смонтированные иа отдельных подвижных самоустанавливающихся платформах, снабженных роликовыми опорами, от л ич а ю или и ся тем, что, с целью воспроизведения реальиой динамики движеиия автомобиля при повороте управляемых колес во время испытаний, роликовые сиоры установлены с возможностью иоворота на вертикальных осях, прнкреилегнчых к упомянутым илатформам.
/ . -
cpus.J
1
21 22
г±:1Г
12
.
JSSSS
.iSS
X
I ч V , I 1 1 It i I I
i i J K If/ I
t:.-i,r;, - V -V li. U iJ-I
f
12
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания автомобилей | 1972 |
|
SU569891A2 |
| Автомобильный тренажер | 1973 |
|
SU546927A1 |
| Испытательный стенд для диагностики технического состояния автомобилей | 1977 |
|
SU678378A2 |
| Стенд для испытания автомобилей | 1957 |
|
SU115268A1 |
| Участок контроля технического состояния транспортных средств | 1976 |
|
SU653530A1 |
| ПЕРЕДВИЖНОЙ ПРИЦЕП-СТЕНД ДЛЯ ДИАГНОСТИКИ, РЕГУЛИРОВКИ, РЕМОНТА, УСТАНОВКИ УГЛОВ СХОЖДЕНИЯ И РАЗВАЛА КОЛЕС АВТОМОБИЛЕЙ | 2010 |
|
RU2442127C1 |
| Стенд для испытания автомобилей | 1972 |
|
SU491863A1 |
| Испытательный стенд для определения параметров, влияющих на плавность хода автомобиля | 1956 |
|
SU109129A1 |
| Испытательный стенд для диагностики технического состояния автомобилей | 1971 |
|
SU471522A1 |
| ДИНАМИЧЕСКИЙ СТЕНД-ТРЕНАЖЕР УСТОЙЧИВОГО ВОЖДЕНИЯ АВТОМОБИЛЯ | 2018 |
|
RU2694427C1 |

5
Д
...
