1
Изобретение относится к области машиностроения, а именно к области станкостроения, и может быть применено в гидрофицированных металлорежущих станках с целью компенсации упругих деформаций в системе СПИД (станок - приспособление - инструмент - деталь).
Известны накладные столы, измеряющие усилие резания и снабженные системой регулирования подачи для стабилизации сил резания.
Однако известные устройства имеют сложную конструкцию, обеспечивают сравнительно малую точность обработки, осуществление статической поднастройки инструмента относительно детали затруднено.
Цель изобретения - устранение указанных недостатков.
Это достигается тем, что в накладном столе с компенсирующим приводом применен стол на упругих опорах, жестко связанный с двумя компенсирующими двигателями поступательного перемещения соответственно вдоль осей X и Y перемещения стола станка от основных приводных двигателей поступательного или вращательного движения.
Причем компенсирующие двигатели расположены на основном столе станка и подключены к соответствующим основным приводным двигателям так, что усилие деформаций упругих элементов накладного стола под действием компенсирующих двигателей направлено в одну сторону с деформациями наиболее податливого звена системы СПИД.
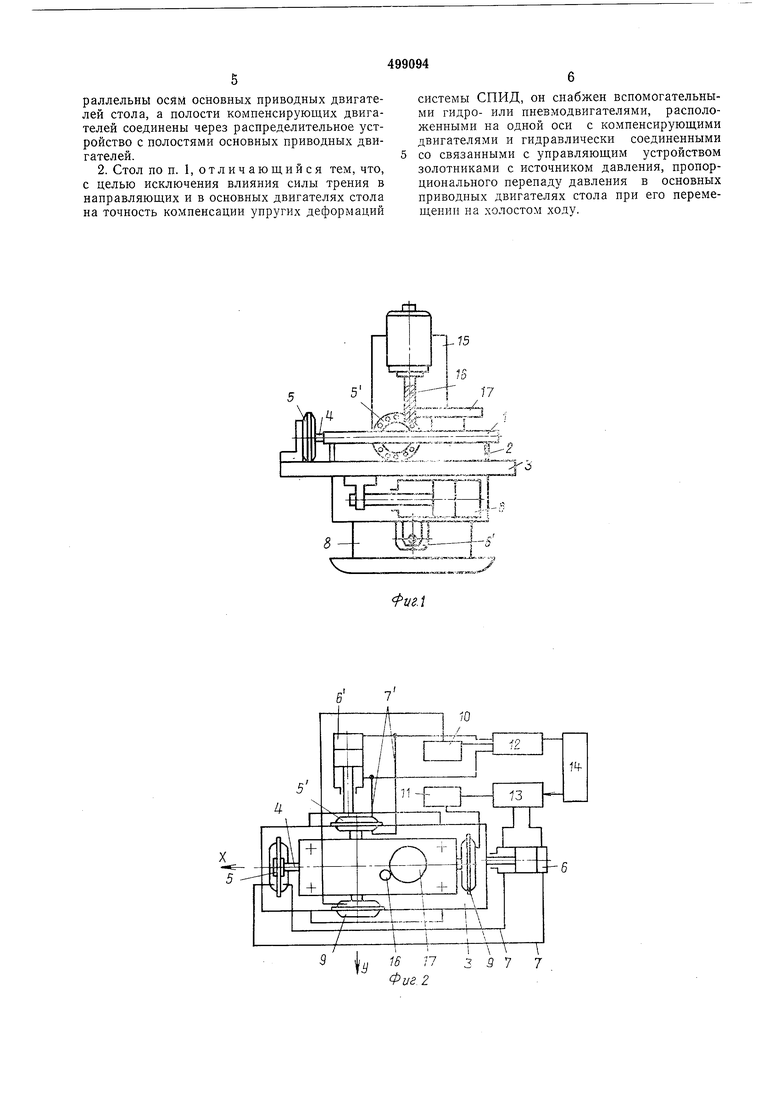
На фиг. 1 схематично изображен вертикально-фрезерный станок с накладным столом с компенсирующим приводом (вспомогательные двигатели условно не показаны); на фиг. 2 - схема расположения накладного стола, основных, компенсирующих и вспомогательных двигателей, а также соединения между основными, вспомогательными и компенсирующими двигателями. Накладной стол с компенсирующим приводом состоит из накладного стола 1 на упругих опорах 2, закрепленных одним концом в столе 3 станка, а другим - в накладном столе 1. С накладным столом жестко соединены щтоки 4 компенсирующих гидравлических или пневматических двигателей перемещения 5, 5, например мембранного типа. Компенсирующие двигатели 5, 5 располагаются соответственно вдоль взаимно перпендикулярных осей X ц Y перемещения стола 3 станка (см. фиг. 2).
Два компенсирующих двигателя 5,5 (см. фиг. 2) гидравлически соединены с полостями основных приводных двигателей 6, 6 стола, в качестве которых используются, например, гидроцилиндры с трубопроводами 7, Т таким
образом, что при перемещении стола 3 станка
8 в компенсирующих двигателях 5, 5 возникает перепад давления, перемещающий на определенную величину накладной стол 1 в направлении, противоположном направлению перемещения стола от основных приводных двигателей 6, 6 стола 3. Два гидравлических или пневматических вспомогательных двигателя 9, 9 линейного перемещения, например мембранного типа, расположены вдоль одной оси с соответствующими компенсирующими двигателями 5, 5 и соединены с источником постоянного давления золотниками 10 и 11, сблокированными с электрогидравлическими усилителями 12 и 13, контролируемыми устройством 14 управления станка.
Вспомогательные двигатели 9, 9 предназначены для устранения влияния сил трения в основных приводных двигателях 6, 6 и в направляющих 15 стола 3 станка. Так как направление силы трения зависит от направления перемещения стола 3, золотники 10 и 11, управляемые электрогидравлическими усилителями 12 и 13, подают рабочую среду под давлением или в ту или в иную полость вспомогательных гидродвигателей 9, 9 в зависимости от направления движения стола 3 станка с инструментом 16 и обрабатываемой деталью 17 (так как сила трения Ртр направлена против движения стола).
Накладной стол с компенсирующим приводом работает следующим образом. При обработке детали 17 на станке 8 возникают упругие деформации системы СПИД, приводящие к погрещностям обработки. Для компенсации упругих деформаций системы СПИД разность давлений из основных приводных двигателей 6, 6, пропорциональная усилию обработки и упругим перемщениям системы СПИД, направленным в одну сторону с перемещениями стола 3 станка 8, передается в полости компенсирующих двигателей 5, 5, которые деформирую упругие опоры 2 накладного стола 1, компенсируя таким образом упругие перемещения системы СПИД. Для устранения влияния сил трения в направляющих стола 3 станка 8, а также сил трения в основных приводных двигателях 6, 6 используются два вспомогательных двигателя 9, 9.
Таким образом, упругие дформации системы СПИД компенсируются подачей разности давлений А/ из основных приводных двигателей 6, 6 в полости компенсирующих двигателей 5, 5, которые деформируют упругие опоры 2 накладного стола 1; при этом упругие опоры 2 за счет ориентированного расположения компенсирующих двигателей 5, 5 и соединения их с рабочими полостями основных приводных двигателей 6, 6 деформируются в противоположном направлении по отнощению к деформациям, вызываемым силами резания. Для устранения влияния сил трения на величину дефюрмаций упругих опор 2 применены вспомогательные двигателя 9, 9, в которые давление рабочей среды подается двумя золотниками 10 и 11. Золотники 10 и И подают
рабочее давление в ту или иную полость вспомогательных двигателей в зависимости от направления (знака) перемещений.
Золотники 10 и И управляются; например, от электрогидравлических усилителей 12 и 13 и подают рабочее постоянное давление в ту или иную полость вспомогательных двигателей, обеспечивая исключение влияния силы трения в направляющих и основных приводных двигателях стола на дополнительные перемещения упругих опор 2 от компенсирующих двигателей 5, 5.
Назначение вспомогательных двигателей 9, 9 - компенсировать составляющую разности
давлений в полостях основных приводных двигателей 6, 6, идущую на преодоление сил трения в направляющих 15 стола и сил трения в основных приводных двигателях 6, 6 стола 3 станка 8.
В полости вспомогательных двигателей 9, 9 подается разность давлений основных приводных двигателей стола станка, возникающая в процессе перемещения стола на холостом ходу без резания (давление холостого
хода). Таким образом, с помощью двух золотников 10 и 11 осуществляется подача давления холостого хода в полости вспомогательных двигателей 9, 9 от отдельного источника питания. Золотники 10 и 11 сблокированы с
электрогидравлическими усилителями 12 и 13 так, чтобы знак разности давлений во вспомогательныхдвигателях 9, 9 менялся при изменении направления перемещения стола 3 станка 8 от основных приводных двигателей
6, 6.
Золотники 10 и и могут переключаться, например, при помощи двух поляризованных реле, включенных в управляющие обмотки электрогидравлических усилителей 12 и 13.
Рабочие усилия компенсирующих двигателей 5, 5 и жесткость упругих элементов 2 подбираются таким образом, чтобы перемещения накладного стола 1 были равны суммарным деформациям системы СПИД вдоль осей X и
У соответственно от действия усилий резания в процессе обработки детали.
Предмет изобретения
1. Накладной стол с компенсирующим приводом упругих деформаций системы СПИД станка, закрепленный через упругие опоры на столе станка и имеющий основной гидравлический или пневматический привод, компенсирующие двигатели для дополнительного смещения закрепленной на накладном столе детали и управляющее устройство для управления основными приводными двигателями стола, отличающееся тем, что, с целью обеспечения статической поднастройки режущего инструмента относительно обрабатываемой детали и компенсации упругих деформаций системы СПИД, компенсирующие двигатели расположены между столом станка и накладным
столом, оси компенсирующих двигателей параллельны осям основных приводных двигателей стола, а полости компенсирующих двигателей соединены через распределительное устройство с полостями основных приводных двигателей.
2. Стол по п. 1, отличающийся тем, что, с целью исключения влияния силы трения в направляющих и в основных двигателях стола на точность компенсации упругих деформаций
системы СПИД, он снабжен вспомогательными гидро- или пневмодвигателями, расположенными на одной оси с компенсирующими двигателями и гидравлически соединенными со связанными с управляющим устройством золотниками с источником давления, пропорционального перепаду давления в основных приводных двигателях стола при его перемещении на холостом ходу.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самоподнастраивающийся линейный шаговый электрогидравлический привод | 1975 |
|
SU735832A1 |
| СИСТЕМА ДЛЯ АКТИВНОГО КОНТРОЛЯ РАЗМЕРОВ ДЕТАЛЕЙ И РЕГУЛИРОВАНИЯ ДЕФОРМАЦИЙ КРУГЛОШЛИФОВАЛЬНОГО СТАНКА | 1989 |
|
RU2014208C1 |
| Система управления упругими перемещениями круглошлифовального станка | 1980 |
|
SU931437A1 |
| СТАНОК ПОРТАЛЬНОГО ТИПА С УСТРОЙСТВОМАВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ УПРУГИХПЕРЕМЕЩЕНИЙ | 1972 |
|
SU427832A1 |
| ПЕРЕДВИЖНАЯ УСТАНОВКА ДЛЯ ВОЗБУЖДЕНИЯ СЕЙСМИЧЕСКИХ ВОЛН | 2005 |
|
RU2289150C1 |
| Устройство для разгрузки механизмов | 1982 |
|
SU1038077A2 |
| Система активного контроля | 1986 |
|
SU1414592A1 |
| Механизм подачи шлифовальной бабки | 1980 |
|
SU941167A2 |
| УНИВЕРСАЛЬНЫЙ КРУГЛОШЛИФОВАЛЬНЫЙ СТАНОК | 1992 |
|
RU2050248C1 |
| Устройство для управления деформациями в системе СПИД | 1982 |
|
SU1071371A1 |
т ,
.. - -l.i«t.
,fc,tii-v---- --J -1
Jdk™;:....L,j..™/
-ГЗ
