1
. Изобретение относится к клещевым захватам, применяемым в сборочных автомагах, : .транспортных, устройствах и машинах-длкпе- редачи изделий и заготовок.
..5
Известны клешевые захваты с автомати4;.ческим раскрыванием губок с помощью кулачковых.упоров, применяемые для передачи изделий сложной формы. Однако в этих захватах нельзя управлять раскрыванием и за- jO крыванием губок в одном из крайних положений.
Для упрощения системы управления механизмом раскрывания губок предлагаетсяjg клещевой захват, механизм раскрывания губок которого снабжен стационарно установленной подпружиненной собачкой одностороннего действия, взаимодействующей с хво,стовиками губок. 20
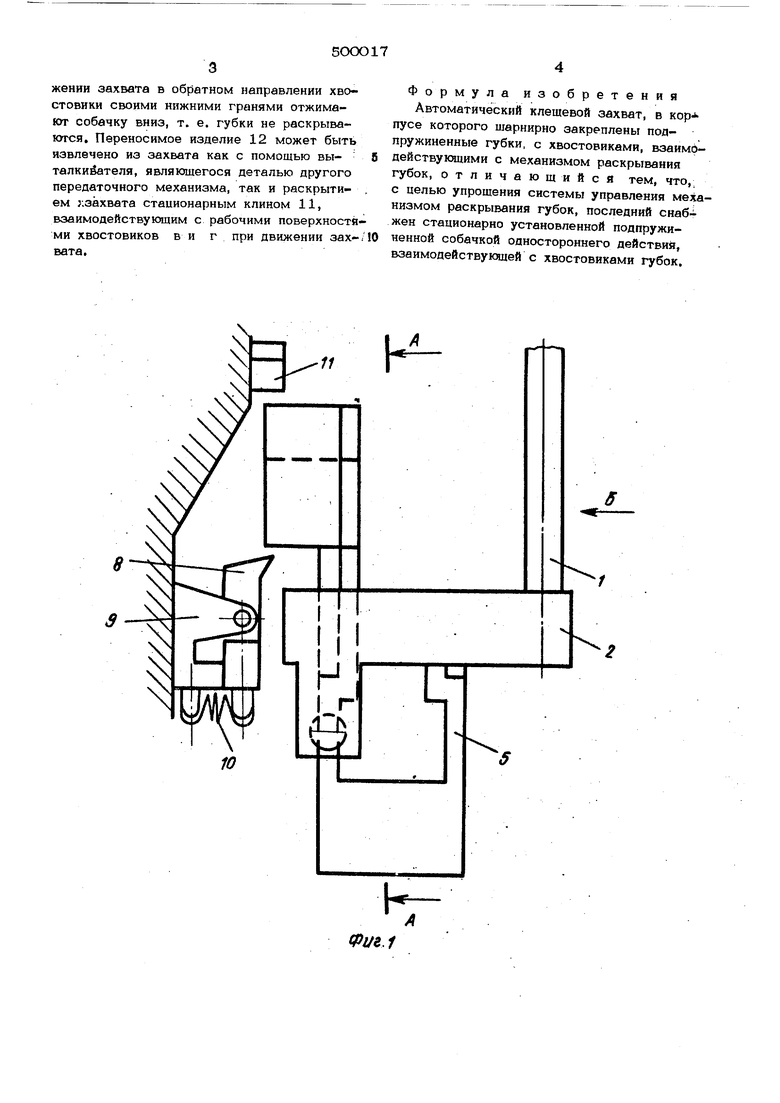
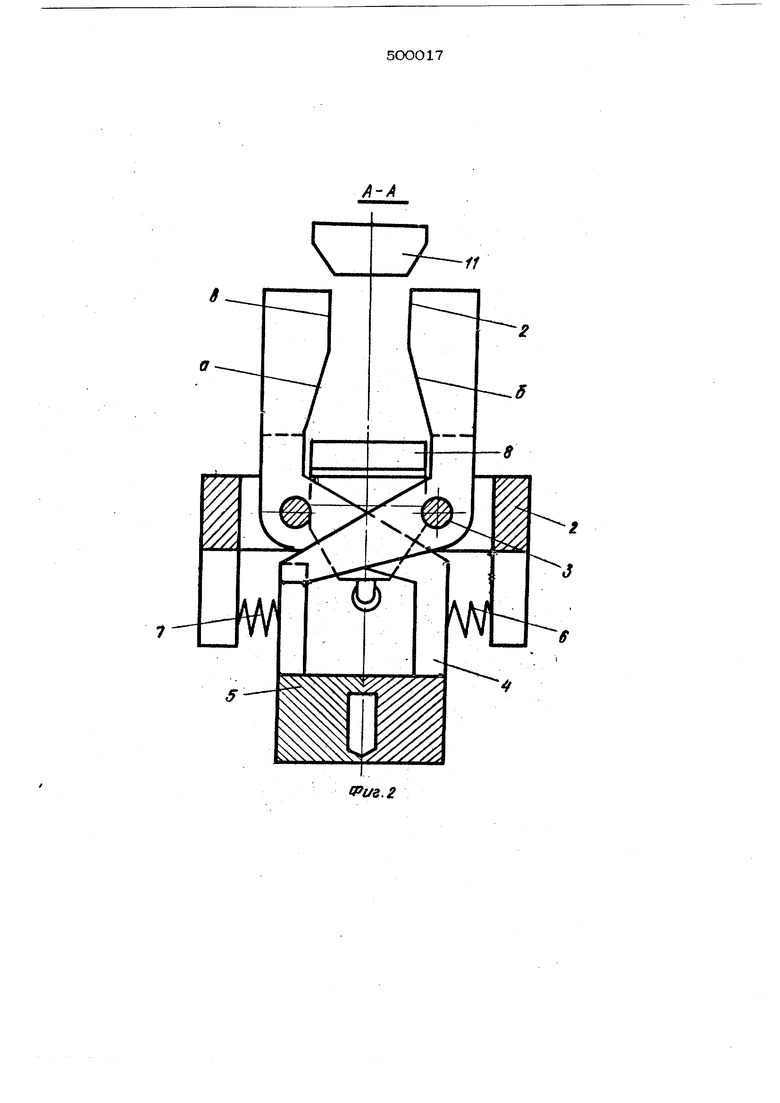
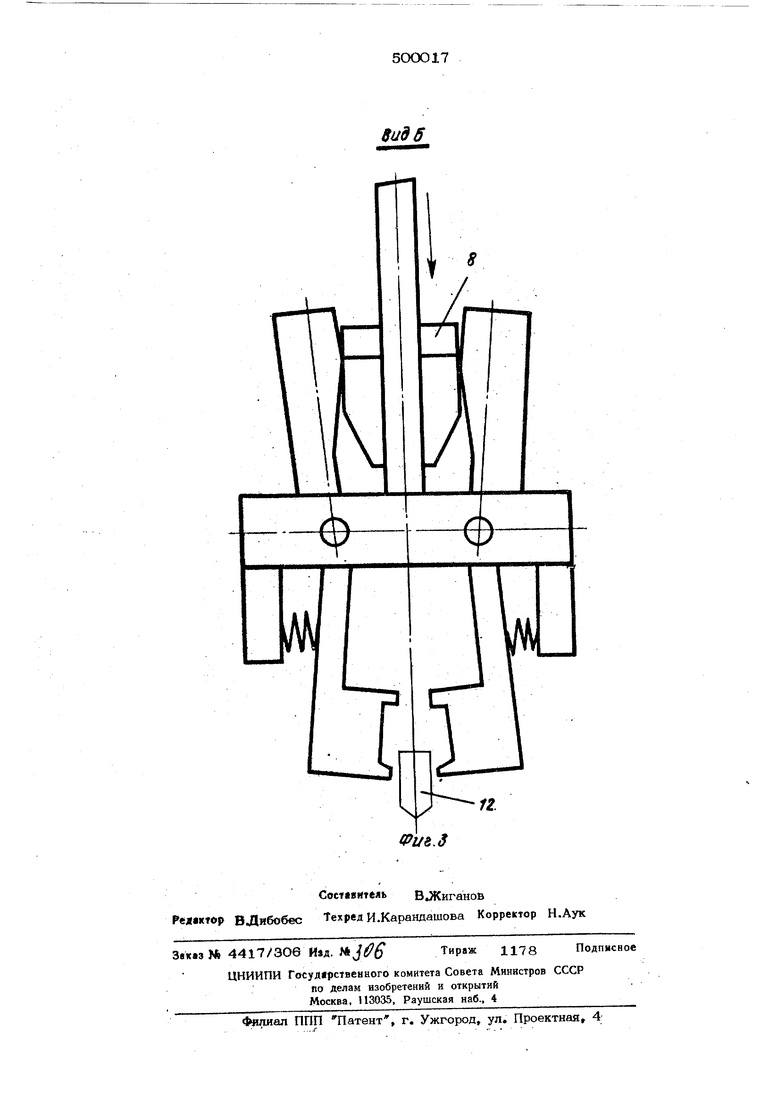
На фиг. 1 изображен клещевой захват, вид сбоку; на фиг. 2 - разрез по А-А на фиг; 1; на фиг. 3 - вид по стрелке Б на фиг. 1 (момент раскрытия губок).25
Стержень 1 механизма перемещения . захвата соединен с корпусом захвата 2, В корпусе на осях 3 установлены губки 4 ид , прижимаемые друг к другу пружинами в I и 7. Собачка 8 находится в неподвижной стойке 9 и прижимается ., к ней пружиной 10. Клин 11 расположен в зоне извлечеj ния перемещаемых изделий 12 изг-убок заК; вата. Губки 4 и 5 снабжены хвостовиками, боковые поверхности которых заходные А и б И рабочие виг расположены на уровне боковых граней собачки и клина.
Стержень 1 механизма перемещения 1 двигает корпус Захвата 2 с губками 4 и 5. При этом движении хвостовики губок 4 и 5 соприкасаются с собачкой сначала за- ходными частями боковых поверхностей ,а и б, а затем рабочими виг.
Во время соприкосновения с собачкой поверхностей виг угол раскрытия остается примерно постоянным. После того, как хвостовики уходят с боковых собачки, губки под действием пружин сжимаются и захватывают деталь. При
жении захвата в обратном направлении хвостовики своими нижними гранями отжимают собачку вниз, т. е. губки не раскрываются. Переносимое изделие 12 может быть извлечено из захвата как с помощью выталкийателя, являющегося деталью другого передаточного механизма, так и раскрытием ;.захвата стационарным клином 11, взаимодействующим с рабочими поверхностями хвостовиков в и г при движении захвата.
Формула изобретения Автоматический клещевой захват, в кор- пусе которого щарнирно закреплены подпружиненные губки, с хвостовиками, взаимодействуклцими с механизмом раскрывания губок, отличающийся тем, что, с целью упрощения системы управления механизмом раскрывания губок, последний снабжен стационарно установленной подпружиненной собачкой одностороннего действия, взаимодействующей с хвостовиками губок.
| название | год | авторы | номер документа |
|---|---|---|---|
| Клещевой захват | 1989 |
|
SU1761460A1 |
| Клещевой захват | 1985 |
|
SU1301694A1 |
| РЫЧАЖНО-КЛЕЩЕВОЙ ЗАХВАТ ДЛЯ ЗАКРЕПЛЕНИЯ ОБРАЗЦОВ ПРИ ИСПЫТАНИИ НА РАСТЯЖЕНИЕ | 1990 |
|
RU2017112C1 |
| АГРЕГАТ ДЛЯ ЗАКАЛКИ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 1972 |
|
SU330203A1 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ ДЛЯ НАЛОЖЕНИЯ МЕХАНИЧЕСКОГО ОБВИВНОГО ШВА | 1993 |
|
RU2106816C1 |
| АВТОМАТИЧЕСКОЕ ПРОТИВОУГОННОЕ УСТРОЙСТВО | 1972 |
|
SU360311A1 |
| Схват | 1981 |
|
SU1013201A1 |
| Устройства для подачи проволоки на холодно-высадочных автоматах для изготовления гвоздей и т. п. Изделий | 1957 |
|
SU115735A1 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Устройство для автоматической сборки плавких предохранителей | 1977 |
|
SU681475A1 |
;/
V
I г
в
А
Фиг, 1
СРиг.г
