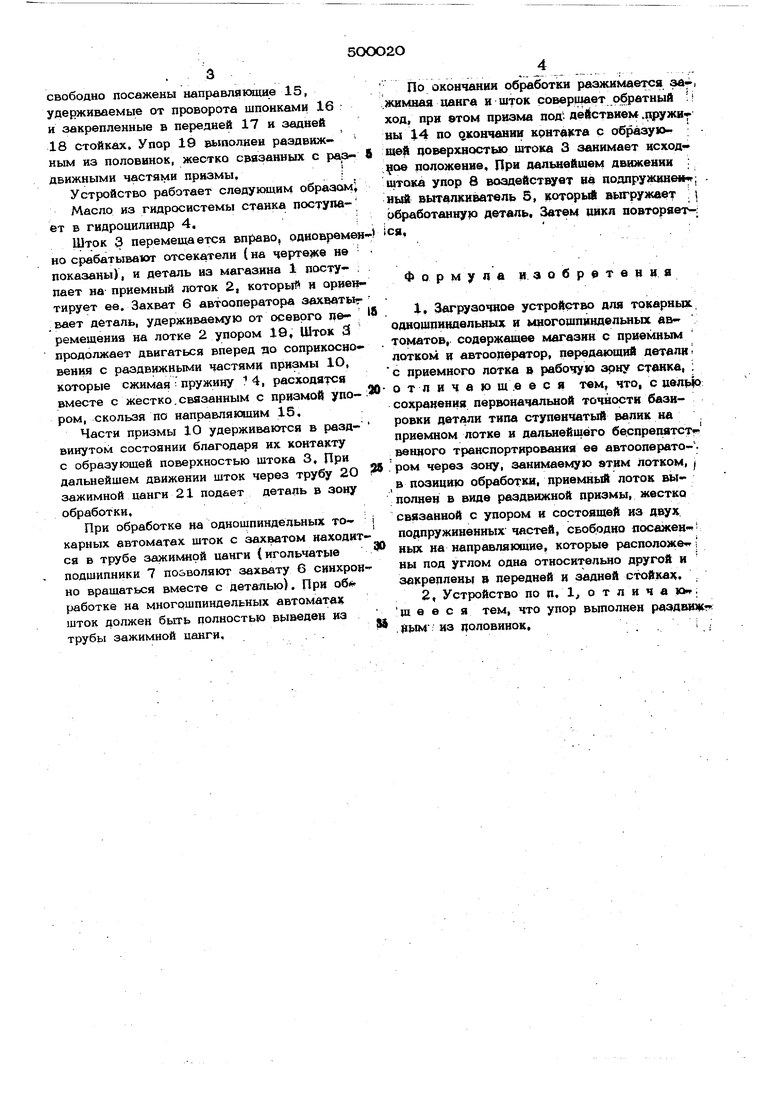
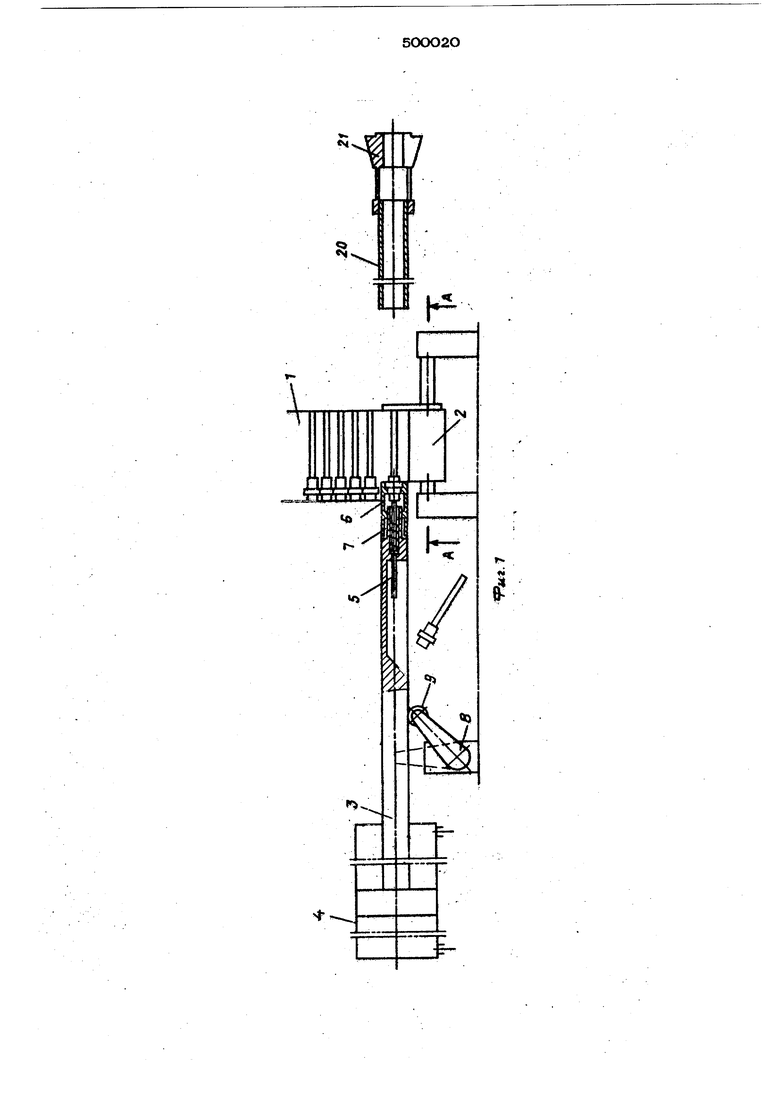
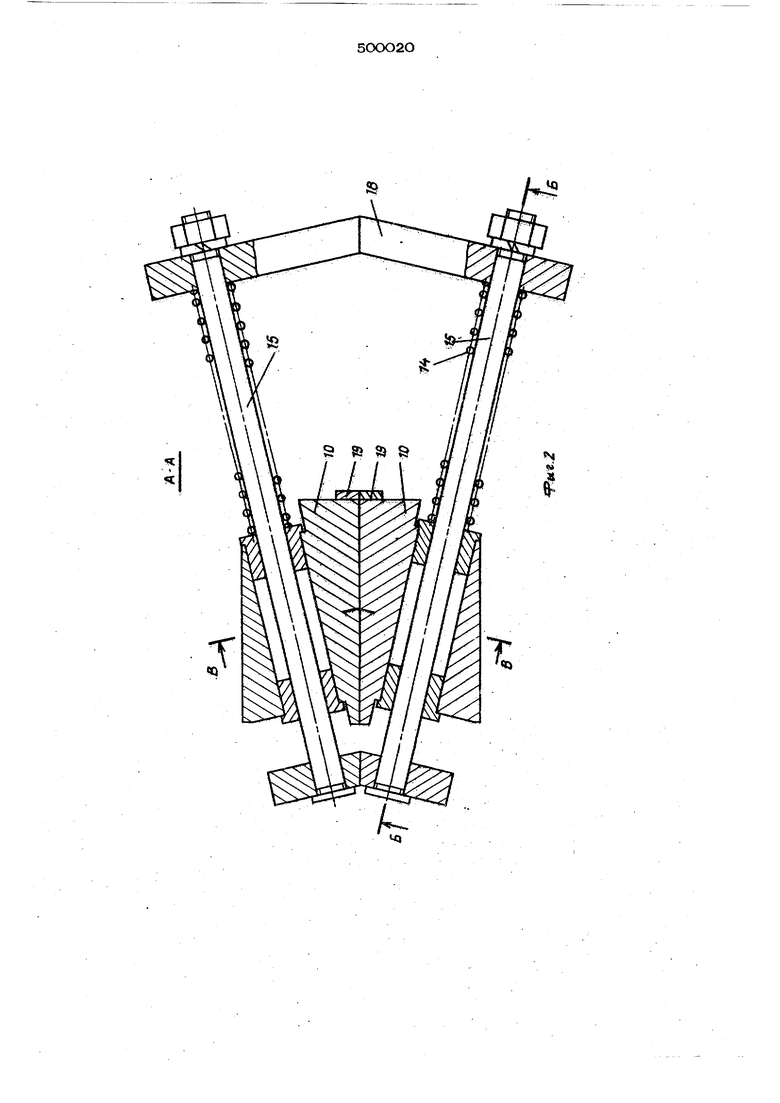
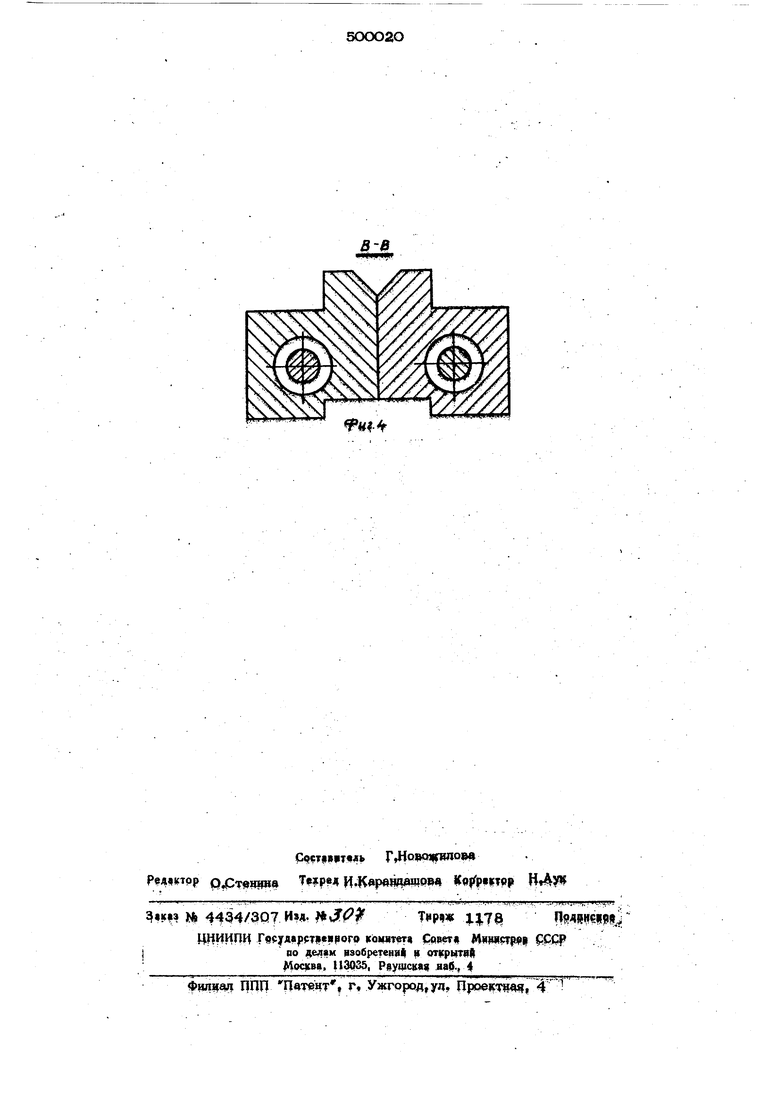
Изобретение относится к средствам ав тонатйзации aerpyaiiis метаплорежущих стан , KDB и может найти применение для подачи : Р рабочую зону одношпиндельных и многоi шпиндельных токарньрс автоматов штучных деталей типа ступенчатый валик, загружае мэ|х с заднего конца шпинделя. : Известны загрузочные устройства для I токарных одношпиндельных и многошпиндел ; ных автоматов, содержащие магазин с прИ I емным лотком и автооператор, передающий I детали с приемного лотка в рабочую зону .станка. ; Недостатком этих устройств является j невозможность обеспечения точного осевого (положения загружаемой детали типа ступен Iчатый валик в процессе ее транспортиро;эания до места закрепления. ; Цель изобретения обеспечить сохранение первоначальной точности базировки детали типа ступенчатый валик на приемном лотке, а также дальнейшее беспрелятствен- Ное транспортирование ее автооператором |через зону, занимаемую лотком, в позицию обработки. Это достигается тем,, что приемный iTOK загрузочного устройства ВЫПРЛНЙН внде раздвижной призмы с упором, состАя-. ;шей. из двух подпружиненных частей, СБОбодно посаженных на направляющие, кото .рые расположены под углом одна относи- , тельно другой и закреплены в передней и { задней стойках; кроме того, упор вьшолне (раздвижным из половинок. i На фиг. 1 показано предлагаемое устр;ройство, общий вид; на фиг. 2 - то же, р з1рез по А-А; на фиг. 3 - то же, разрез по; Б-Б; на фиг, 4 -; то же, разрез по . ; : Устройство состоит из магазина 1, . | приемного лотка 2, аптооператора 3, выполненного в виде щтока гидроцилиндра 4 и снабженного выталкивателем 5 и захватом 6 в игольчатых подшипниках 7, качающегося упора 3 и ролика 9, J Приемный лоток выполнен в виде раз- вижной призмы 1О, состоящей из двух частей, которые удерживаются от поворота шпонками 11, фиксируемые винтами 12. Во втулках 13, запрессованных в тело . ; призмы и поапружиненных пружинами 14, свободно посажены направляющие 15, удерживаемые от проворота шпонками 16 и закрепленные в передней 17 и задней 18 стойках. Упор 19 выполнен раздвижным из половинок, жестко сказанных с ра,э ДБИжными частями призмы.I Устройство работает следующим образсал Масло из гидросистемы станка поступает в гидроцилиндр 4, Шток 3 перемещается вправо, рдиовреме но срабатывают отсекатели (на чертеже не показаны), и деталь из магазина 1 поступает на приемный лоток 2, который и ориен тирует ее. Захват 6 автооператора захватьь вает деталь, удерживаемую от осевого перемещения на лотке 2 упором 19, Шток 3 продолжает двигаться вперед до соприкосновения с раздвижными частями призмы Ю, которые сжимая пружину 4, расходятся вместе с жестко, связанным с призмой упором, скользя по направляющим 15, Части призмы 10 удерживаются в раздвинутом состоянии благодаря их контакту с образующей поверхностью штока 3, При дальнейшем движении шток через трубу 2О зажимной цанги 21 подает деталь в зону обработки. При обработке на одношпиндельных токарных автоматах шток с захватом находит ся в трубе зажимной цанги {игольчатые подшипники 7 позволяют захвату 6 синхроЯ но вращаться вместе с деталью), ПрИ об работке на многошпиндельных автоматах шток должен быть полностью выведен из трубы зажимной цанги. По окончании обработки разжимается aaf, .жнмная цанга и шток соверщает обратный : I ход, при 8ТОМ призма под , действием .гфужи« вы 14 по окончании крнтв|ста с образу1О щей цоверхностью штока 3 занимает исходое положение. При дальнейшем движении : штока упор 8 воздействует на подпружинен ; иый выталкиватель 5, }(оторый выгружает | Ьбработанну|о деталь. Затем иикл повторяет -; сы, : Формула изобретения 1,Загрузочное устройотво для токарных одношпиндельных н многошпиндельных автоматов, содержащее магазин с пр1 емным лотком и автооператор, передающий детали с приемного лотка в рабочую арку стенка, : отличающееся тем, что, с цели сохранения первоначальной точности базнровки детали типа ступенчатый эалик на приемном лотке и дальнейшего беспрепятстг венного транспортирования ее автооперато-ром через зону, занимаемую этим Лотком, j ,в позицню обработки, приемный лоток выполнен в виде раздвижной призмы, жестко связанной с упором н состоящей из я«ук подпружиненных частей, свободно лосажен ньрс на направляющие, которые расположен ны под углом одна относительно другой и закреплены в передней и задней стойках, 2,Устройство по п, 1 о т л и ч а щ е е с я тем, что упор вьтолнен раздвиж . HbiM из половинок,i :
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ДЛЯ СБОРКИ УЗЛОВ | 1991 |
|
RU2022752C1 |
| Устройство съема и передачи деталей на токарном автомате | 1989 |
|
SU1712126A1 |
| АВТООПЕРАТОР ДЛЯ ЗАГРУЗКИ И РАЗГРУЗКИ ДЕТАЛЕЙ12 | 1969 |
|
SU258003A1 |
| Н И. В. PoiiiiiU.oii | 1972 |
|
SU327973A1 |
| Устройство для загрузки станка | 1983 |
|
SU1073072A1 |
| Загрузочное устройство к токарному многошпиндельному станку | 1991 |
|
SU1816637A1 |
| Автоматическая линия для обработки деталей типа дисков | 1973 |
|
SU459324A1 |
| Автооператор для токарного многошпиндельного автомата для двусторонней обработки колец | 1987 |
|
SU1505750A1 |
| Автооператор | 1970 |
|
SU355848A1 |
| Автооператор для многошпиндельных станков | 1986 |
|
SU1465248A1 |
tq
«О
