Изобретение относится к машиностроению и может быть использовано, например, для автоматической за1)узки многоишин/Кльных токарных полуавтоматов с горизонтальной осью и нинделей ферромагнитн 1)1 ми деталями.
Известно устройство для загрузки станка, например многошпиндельного токарного полуавтомата, ферромагнитными деталями, содержащее магазин, приемную призму и подаватель с электромагнитным захватом 1 Недостатками известного устройства являются: ограниченная номенклатура захватываемых деталей; ненадежный захват детали, ввиду взаимодействия последних с торцом захвата.
Цель изобретения - расширение технологических возможностей и повышение надежности устройства.
Указанная цель достигается тем, что в устройстве для загрузки станка, например многошпиндельного токарного нолуавтомата, ферромагнитными деталями, содержащем магазин, приемную призму и подаватель с электромагнитным захватом, пос-чедний выполнен в виде двух соединенных последовательно П-образнь х электромагнитов, нричем поверхности нижних полюсных наконечников соответствуют профилю обработанной детали, а катушки установлены на верхних нолюсных наконечниках.
Такое выполнение устройства позволяет вынести катушки из зоны приемной призмы и уве.тичить их до необходимых размеров. Кроме того, с деталью контактируют оба полюса электромагнита, что позволяет свести до минимума сопротивление цепи деталь-электромагнит магнитному потоку.
В результате но.менклатура деталей, которые могут быть установлены и извлечены после обработки с помощью предлагаемого устройства, значительно расширяется.
На фиг. 1 показано устройство, в аксонометрии, общий вид (установлено на .многошпиндельном токарном полуавтомате), на фиг. 2 - вид А на фиг. 1; на фи1-. 3 электромагнитный захват устройства.
Устройство для загрузки содержит магазин 1, смонтированный на станине 2 токарного полуавтомата, и закрепленные на плите 3 приемную призму 4, отводящий „юток Г), подаватель 6. Плита 3, в свою очередь, размещена в направляющих 7, уста 1овленн1зг на 1фодо,:1ьном суппорте 8 полуавтомата. Приводом подавателя G служит нневмоц|.линдр, корнус 9 которого с помо|цью нланки 10 п скалки 11 жестко связан со станиной 2. На штоке 12 пневмоцилиндра закреплен электромагнитный захват 13 подавателя. Электромагнитный захват содержит П-образных электромагнита 14 и 15. установленных с зазором .между ними на нсма|-нитп(ж плите 16 и соединенных последовательно с HO.MOHibio планки 17. Верхние полюсные наконечники 18 служа1 сердечникам.и KaTynjeK 19. Нижние полюсные наконечники 20 и 21, являющиеся разнои.менны.ми (севе1)ный и -- N и S), выполнены с поверхностями, соответствующими, нрофилю части обработанной .аетали. Для предотвращения нроворота захвата служит скалка 22.
Устройство работает в автоматическом режиме.
Заготовки 23 загружают в магазин 1. Включают устройство, при это.м отсекатель (не показан) выдает одну заготовку на нриемную призму 4. Подается команда на неремещение влево щтока 12 пнев.мопилиндра. Одновременно подается питание на катушки 19 э.пектромагнитов захвата 13. Захват, дойдя до упора в торец расположенной на призме 4 за1 отовки. притягивает ее к себе и задвигает в раскрытую цангу 24 пл1инделя 25 станка. Пос.те зажима заготовки цангой электромагнитный захват обесточивается в крайнее правое положение. Шпиндельный блок 26 станка поворачивается, перемещая заготовку в одну из рабочих позиций.
Производится обработка с помощью инструментов, установленных на продольном суппорте 8 и поперечных суппортах станка (на чертеже не показаны). При. перемещении продольного суппорта 8 плита 3 с закрепленными на ней подавателем 6, лотком 5, приз.мой 4 удерживается на месте планкой 10 и скалкой 11.
Обработка на станке производится одновре.менно на всех шпинделях (кроме позиции загрузки), и в результате iio.iHoro поворота шпиндельного блока 26 напротив захвата 13 оказывается обработанпая деталь.
Подается команда на пере.мещение влевс) штока 12 пневмоцилиндра с одновременным включением электромагнитного захвата 13. Захват перемещается до упора полюсных наконечников 20 и 21 в заплечик обработанной детали. Таким образом, деталь оказывается частично охваченной полюсными наконечниками, и значительная часть магнитного потока проходит через нее. Захватпритягивает деталь. Цанга 24 раскрывается, а шток 12 с захватом 13 и ,а,еталью перемешается вправо. В позиции над отБоднци1м лотком 5 электро.магнпт.ный захват обьчгочиваетси, и дегаль под действием сял,: тяжести падает в лоток.
Затем цикл повторяется.
Использование изобретения |)асп1пряет технологические возможности устройства для загрузки. Это связано, во первых, с тем, что катушки вынесен) из 1рием К)й призмь, что позволяет не О -ранп -1Ч нат) их габарит диаметром .ча1-ружаем)х дета;1ей. Во-в орых, деталь ко ггактир ет с обо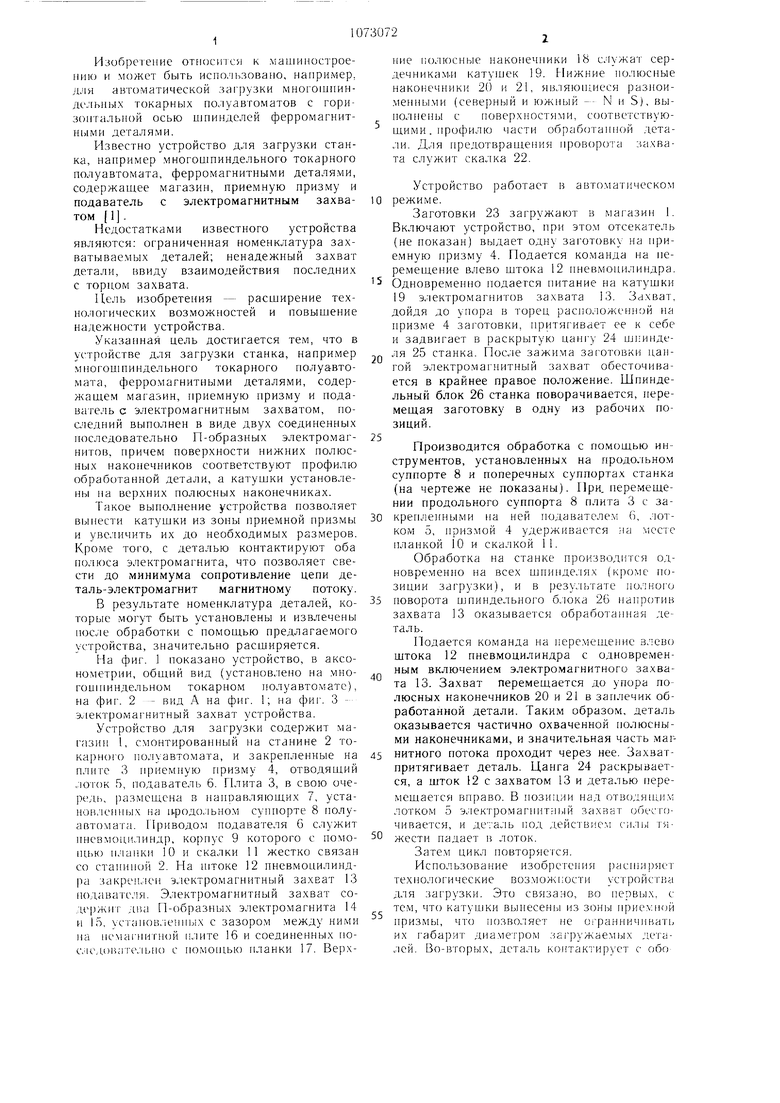

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ проектирования автооператоров | 1959 |
|
SU142131A1 |
| Устройство для загрузки и разгрузки многошпиндельных токарных полуавтоматов | 1973 |
|
SU512024A1 |
| Загрузочное устройство | 1974 |
|
SU500020A1 |
| Устройство для базирования деталей на токарном многошпиндельном станке | 1981 |
|
SU992123A2 |
| ЗАГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО | 1997 |
|
RU2138368C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ТОКАРНОГО АВТОМАТА ШТУЧНЫМИ ЗАГОТОВКАМИ НЕМЕРНОЙ ДЛИНЫ | 1966 |
|
SU224254A1 |
| Устройство для механической обработки деталей | 1981 |
|
SU992122A1 |
| Автоматизированная технологическая единица | 1984 |
|
SU1197818A1 |
| Загрузочно-разгрузочное устройство | 1985 |
|
SU1247230A1 |
| ТОКАРНЫЙ ГОРИЗОНТАЛЬНЫЙ МНОГОШПИНДЕЛЬНЫЙАВТОМАТ | 1971 |
|
SU305960A1 |
УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ (ZTAHK.A-, например многошпиндельного токарного нолуватомата, ферромагнитными деталями, содержащее магазин, ириемную призму и подаватель с электромагнитным захватом, отличающееся тем, что, с целью расширения технологических возможностей и повышения надежности устройства, электромагнитный захват выполнен в виде двух соединенных последовательно П-образных электромагнитов, причем поверхности нижних полюсных наконечников соответствуют профилю обработанной детали, а катушки установлены на верхних полюсных наконечниках. (Л со о v3 Ю
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Камьинный Н | |||
| И | |||
| Автоматизация загрузки станков, М., «Машиностроение, 1977, с.115, р | |||
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU105A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
