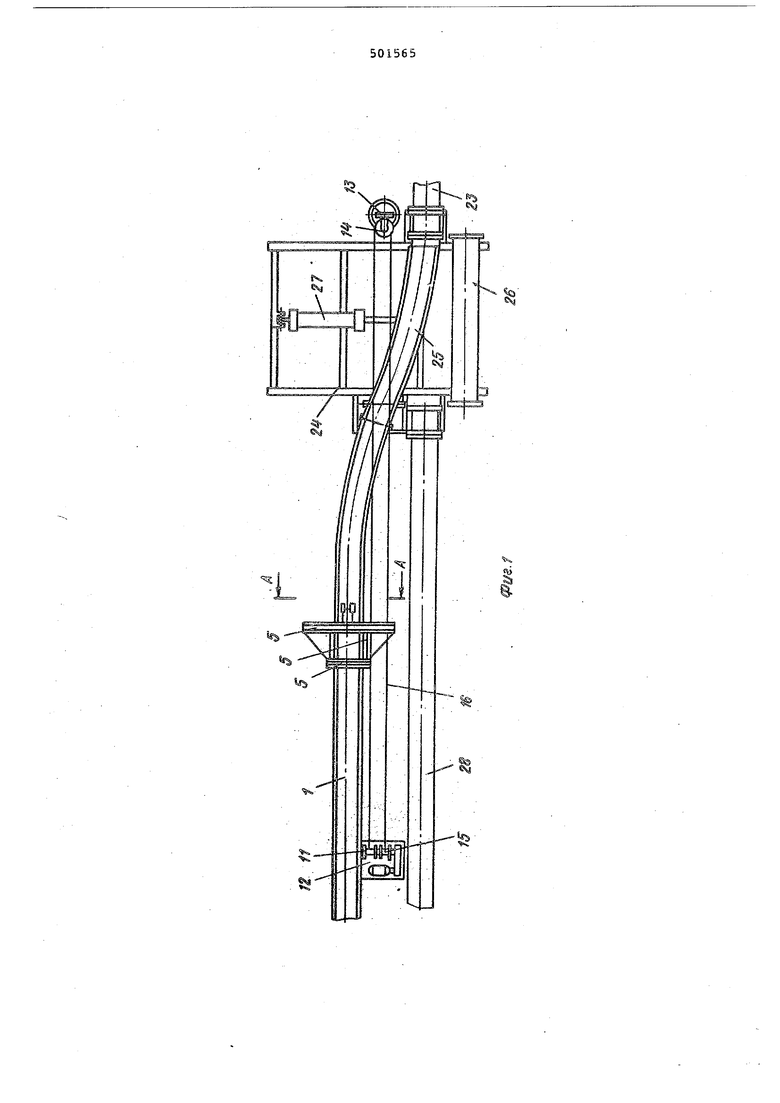
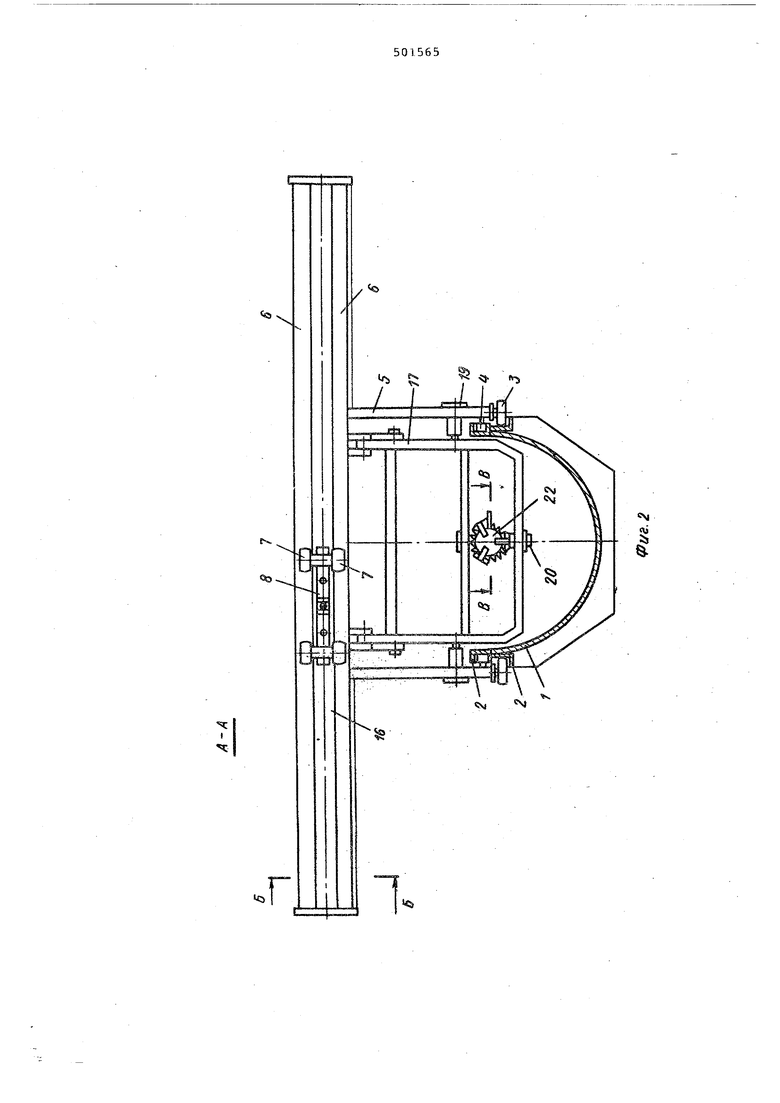
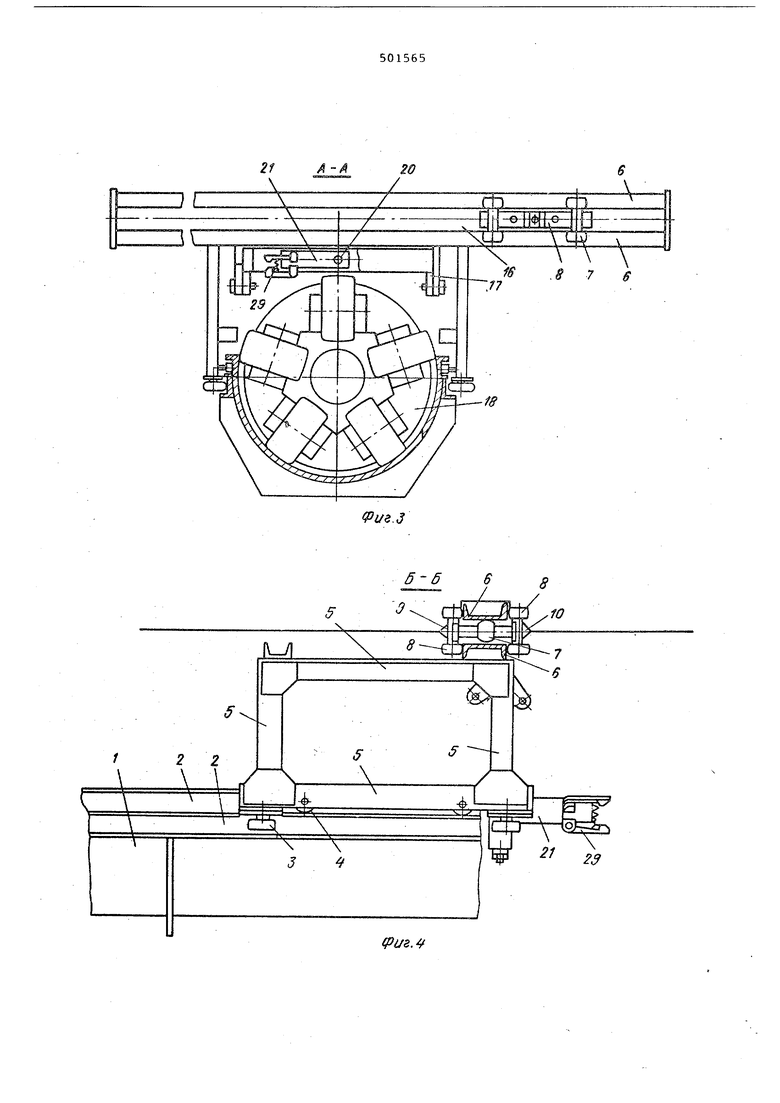
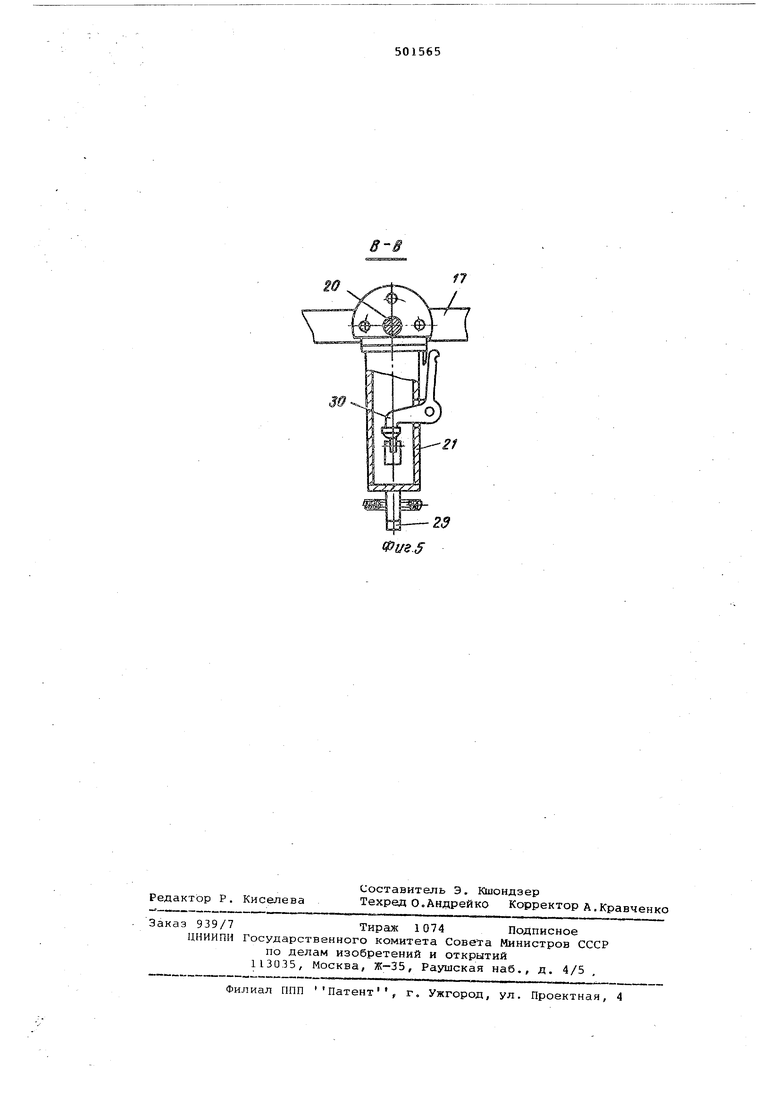
дотшна бьзгь кесколько больше расетоя- ння ме;эду осями транспортного трубо прозода и желоба 1. На направляющих б установлена подвижная на роликах 7 теЛежка 8, к которой с двух сторон закреплены концы 9 и 10 (фиг. 4)троса Конец 9 троса соединен с барабаном 11 (фиг. 1) лебедки 12. Конец 10 троса через закрепленный на неподвижном кронштейне 13 блок 14 соединен с барабаном 15 лебедки 12. Идущая от блока 14 к барабану 15 ветвь 16 (фигЛ,2) троса свободно размещается в зазоре между направляющими б, К раме каретки 5 под направляющими б шарнирно прикреплена поворотная ра ма 17 (фиг, 2,3), которая может за нимать рабочее положение, показанное на фиг 2р или. положение для свободного прохода контейнеров 18 под кареткой 5 при выводе их в .жалоб 1, показанное на фиг„;. 3 Оба положения рамы 17 фиксируются с ПОМОЩЬЮ: фн;ксаторов 19 раме каретки 5.-. На;-раме 17 шарнирно с помощью вертикальной оси 20. (фиг,2, .3,5) закреплен на полой штанге 21 (фиг. 3j5) пружинныйзахват 22 (фиг.2) Штанга 21 может занимать рабочее положение, показанное на-фиг. 2, или положение для свободного прохода контейнеров 18 под кареткой 5 .при выходе их в желоб 1, показанное на фиг, .3. Устройствор выполненное согласно настоящему изобретениЮр работает следующим образом. Для вывода контейнерного .состава из транспортного трубопровода 23 (фиг. 1) в желоб 1 последний подклю-. чается к трубопроводу 23 с помощью стрелочного перевода 2.4, имеющего элемент 25 желоба и отрезок 26 трубы. С помощью привода 27 обеспечивается соединение трубопровода 23 посредством элемента 25 с желобом 1 или посредством отрезка 26 трубы с трубопроводом 28 „ Вывод контейнеров осуществляется вьадуванием его из трубопрово да 23, При этом поворотная рама 17 . и штанга 21 захвата 22 занимают нерабочее положение, показанное на Фиг.З. В зависимости от положения каретки 5 для ввода контейнеров в трубопровод 23 включается лебедка 12, с помощью которой каретка выставляется в положе ние за контейнерным сЬставом, считая, что первый (головной) контейнер находится - в желобе 1 перед стрелочным liep водом 24 о Поворотная рама 17 и захват 22 при водятся в рабочее положение. Включает ся лебедка 12.такимобразом, что трос наматыв.ается на барабан 15 и .сматывается с барабана 11, перемещая каретку 5 в направлении к стрелочному перевод . 24. Движение каретке 5 передается от тележки 8, к которой, прикреплен трос своими концами 9 (фиг, 4) и 10. При этом захват 22 встречается с буфером (не показан) заднего контейнера,сцепляется с ним и дальнейшее дв жeниe каретки 5 происходит вместе с контейнерами до тех пор, пока последний контейнер не войдет в трубопровод 23 При движении каретки 5 на криволинейном участке желоба 1 и стрелочного перевода 24 тележка 8 свободно перемещается в поперечном направлении относительно каретки 5, обеспечивая неизменное направление ветвей троса,определяемое положением лебедки 12 и блока 14, Когда все контейнеры вошли в трубопровод 23, рычаги 29 (фиг. 3,4,5) захвата 22 разжимаются с помощью рычажного механизма 30 (фиг. 5), Лебедка реверсируется (включается так, что трос наматывается на барабан 11 и сматывается с барабана 15) и каретка 5 отводится в заднее положение. Поворотная рама 17.и захват 22 устанавливаются в нерабочее положение, обеспечивающее посЛёдук щий вывод контейнеров из трубопровода 23 и желоб 1. Стрелочный перевод 24 пербстйвляется в положение, обеспечивающее соосноё соединение отрезка 26 трубы с трубопроводами 23 и 28, после чего контейнеры под действием перепада давления, создаваемого воздуходувной станцией (не показана),следуют в заданном направлении. Формула .изобретения 1,Ремонтно-монтажная станция контейнерной пневмотранспортной установки, содержащая транспортный трубопровод, связанный стрелочным переводом с ремонтно-монтажным желобом, и лебедку, отличающаяся тем, что, с целью облегчения и ускорения операции ввода контейнеров из желоба в трубопровод, на боковых стенках желоба укреплены направляющие, на которых установлена на роликах подвижная вдоль оси желоба каретка с .пружинным захватом .контейнера, обращенным в сторону стрелочного перевода, причем в верхней части каретки расположены поперек оси желоба направляющие штанги;, имеющие длину не меньше, чем расстояние между осями транспортного трубопровода и желоба, на которых установленаподвижная тележка с закрепленными на ней концами троса, другие концыкоторого связаны с барабанами лебедки, 2,Станция по пЛ, отличающаяся тем, что, с целью обеспечения беспрепятственного прохода контейнеров по желобу при их выводе из трубопровода, захват расположен На откидной раме, ось поворота которой параллельна штангам каретки и расположена выше габаритов, находящихся в желобе контейнеров.
r
m
ooSC
I
N
I
M
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для возведения насыпи | 1987 |
|
SU1523501A1 |
| РЕЛЬСОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ МОНТАЖА И ДЕМОНТАЖА ПРОВОДОВ КОНТАКТНОЙ ПОДВЕСКИ ПОД ЗАДАННЫМ НАТЯЖЕНИЕМ И СПОСОБЫ МОНТАЖА ПРОВОДОВ КОНТАКТНОЙ ПОДВЕСКИ ПРИ ПОМОЩИ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2097218C1 |
| Устройство дл ориентированной укладки в тару кольцеобразных предметов | 1988 |
|
SU1555191A2 |
| Устройство для разгрузки штучных грузов | 1989 |
|
SU1640079A1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА КОНТАКТНОЙ СЕТИ ЭЛЕКТРИФИЦИРОВАННЫХ ЖЕЛЕЗНЫХ ДОРОГ | 2001 |
|
RU2223184C2 |
| Устройство для натяжения ленты конвейера | 1987 |
|
SU1512880A1 |
| Трубопроводная пневмотранспортная контейнерная система | 1978 |
|
SU1022908A1 |
| Промежуточная станция контейнерной пневмотранспортной установки | 1986 |
|
SU1357324A1 |
| СИСТЕМА ОБЕСПЫЛИВАНИЯ К ГРУЗОПОДЪЕМНОЙ МАШИНЕ С ГРУЗОВОЙ ЛЕБЕДКОЙ | 1992 |
|
RU2068384C1 |
| УБОРОЧНЫЙ ПРИЦЕП | 1969 |
|
SU241338A1 |
.Г
4 (риг.21
23
(ffi/s.5
