1
с
Изобретение относится к подъемным
устройствам, преик ушествекно к грузозахватным элементам, конструктивно сопряженным с нкми, и может быть испольэовано Е копровых установках для подъема, опускания и отцепки грузов, снабженных цилиндрической осью.
Известно аахватное устройство для грузов, снабженных цилиндрической осью, содержащее корпус, подпружиненные захватные рычаги, шарнирно закрепленные на корпусе, и рычажный фиксатор положения рычагов.
Недостаток известного устройства - ненадежность соединения захвата с фиксатором, вследствие чего возможен срыв груза
Цель изобретения - повышение наг.еж.ности работы устройства.
Достигается это тем, что на внутрюнних сторонах захватных рычагов в их верхней части выполнены скосы, образующие паз для захода фиксатора, а в центральной части рычагов имеются полукруглые выем- ,ки для обхвата оси груза, над которыми (установлены упорные планки.
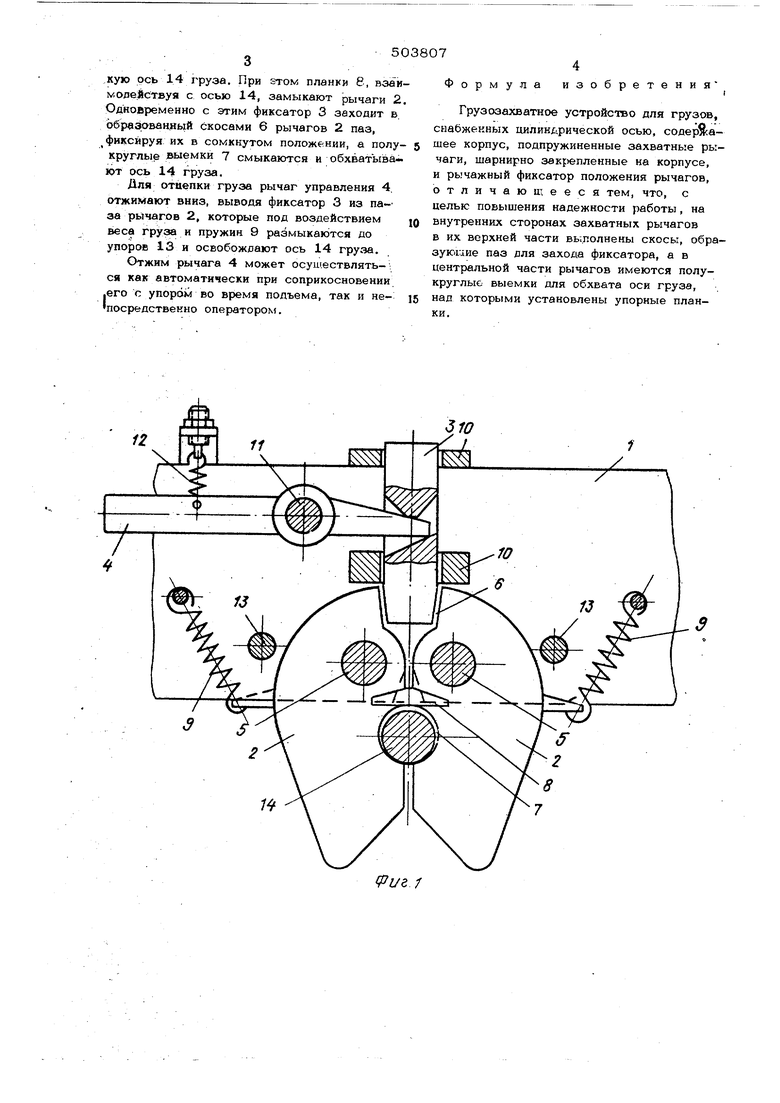
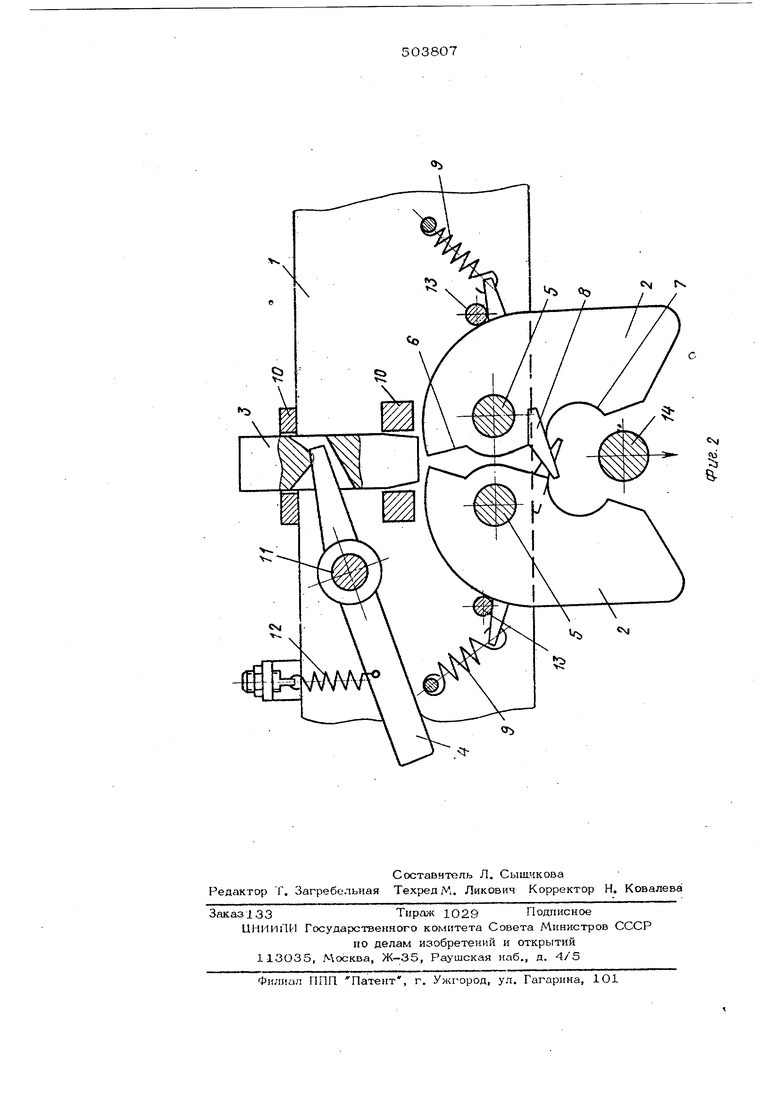
На фиг. 1 изображено предложенное устройство в момент подъема груза; на фиг. 2 то же, в момент захвата и отоепки груза. : Устройство содержит корпус 1, захват5 ные рычаги 2, рычажный фиксатор 3 и рычаг управления 4.
Захватные рычаги 2 выполнены в виде щек и шарнирно установлены на осях 5 в корпусе 1. На внутренних сторонах эахват0 ных рычагов 2 в их верхней части выполнены с;срсы 6, образующие паз для захода .фиксатора, а в центральной части рычагов 2 имеются полукруглые выемки 7, над которыми установлены планки 8, Рычаги 2 свя5 эаны с размыкающими их пружинами 9,
Фиксатор 3 выполнен в виде вертикального клина, подвижно установленного в направляющих 1О корпуса 1. Фиксатор 3 имеет профильное отверстие и взаимодействует че
рбз него с рычагом управления 4, вращаю- щимся на оси 11 и соединенным с пружиной 12.
Для захвата груза устройство с разомкнутыми до упоров 13 под воздействием пружиа 9 рычагами 2 опускают на цилиндрическую ось 14 груза. При зтом планки 8, вэаисодействуя с осью 14, замыкают рычаги 2. Одновременно с этим фиксатор 3 заходит в образованный скосами 6 рычагов 2 паз, фиксируя их в сомкнутом положении, а полукруглые выемки 7 смыкаются и обхватыва- KJT ось 14 груза. Для отцепки груза рычаг управления 4, отжимают вниз, выводя фиксатор 3 из паза рычагов 2, которые под воздействием веса грузе и пружин 9 размыкакэтся до упоров 13 и освобождают ось 14 груза. Отжим рычага 4 может осуществлять- ся как автоматически при соприкосновении .его с упором во время подъема, так и непосредственно onepaTOpONi. 50 7 рмула изобретения Ф Грузозахватное устройство для грузов, снабженных цилиндрической осью, содерЙ:ашее корпус, подпружиненные захватные рычаги, шарнирно закрепленные на корпусе, и рычажный фиксатор положения рычагов, отличающееся тем, что, с целью повышения надежности работы, на внутренних сторонах захватных рычагов в их верхней части выполнены скосы, образующие паз для захода фиксатора, а в центральной части рычагов имеются полукруглые выемки для обхвата оси груза, над которыми установлены упорные планки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1990 |
|
SU1773846A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Захватное устройство для грузов с цапфами | 1985 |
|
SU1316972A1 |
| МЕХАНИЗМ ФИКСАЦИИ ГРУЗОЗАХВАТНОГО УСТРОЙСТВА | 1992 |
|
RU2035380C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Траверса с захватами за бугели | 2016 |
|
RU2652761C1 |
| Грузозахватное устройство | 1988 |
|
SU1652277A1 |
| Контейнер для сыпучих грузов | 1980 |
|
SU982986A1 |
| Грузозахватное устройство | 1982 |
|
SU1126525A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
27г/г /
оъ
