1
Изобретение относится к электротехнической промышленности, в частности к оборудованию для производства электровакуумных приборов, например ламп накаливания общего назначения, и предназначено для изготовления тарелок.
Известны автоматы развертки тарелок карусельного типа периодического действия, содержащие патроны для зажима и вращения дрота, механизмы загрузки и установки дрота по высоте развертки тарелок, малого и больщого ножей.
Технологические операции на известных автоматах выполняются в момент остановки карусели.
Цель изобретения - увеличение производительности изготовления тарелок.
Это достигается тем, что автомат выполнен в виде конвейера с двумя звездочками, на одной из которых смонтирован по крайней мере один механизм развертки тарелок, а на другой - механизм малого и больщого ножей, причем звездочки связаны непрерывно движущейся с постоянной скоростью цепью, на которой размещены патроны и механизмы для загрузки и установки дрота но высоте.
Для обеспечения загрузки и установки по высоте дротов, а также развертки и отрезки тарелок, в устройстве на пути движения патронов установлены неподвижные кулаки,
неподвижные зубчатые рейки и транспортеры с гибкими элементами, например из стальной ленты.
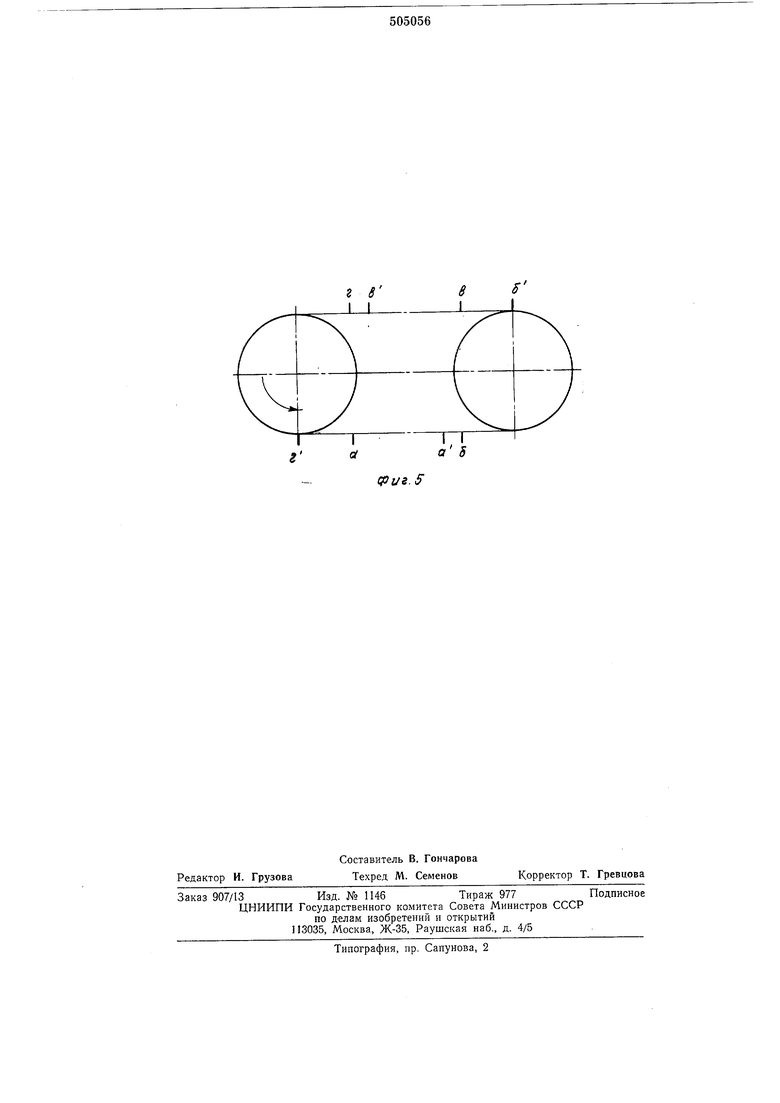
На фиг. 1 схематически изображен предлагаемый автомат; на фиг. 2 - разрез по А-А на фиг. 1; на фиг. 3 - разрез по Б-Б на фиг. 1; на фиг. 4 - кинематическая схема автомата; на фиг. 5 - его технологическая схема.
0 Автомат развертки тарелок (фиг. 1) имеет стол 1, на котором смонтированы ведущая 2 и ведомая 3 звездочки, приводящие в движение цепь 4 с закрепленными на ней патронами 5. Патроны взаимодействуют с неподвижными кулаками 6 и 7 при загрузке и установке дрота по высоте и с неподвижными рейками 8, 9 при развертке и отрезке тарелок. Транспортер 10, система И газового оснащения и лоток 12 для перегрузки тарелок в печь
0 13 отжига размещены на столе 1.
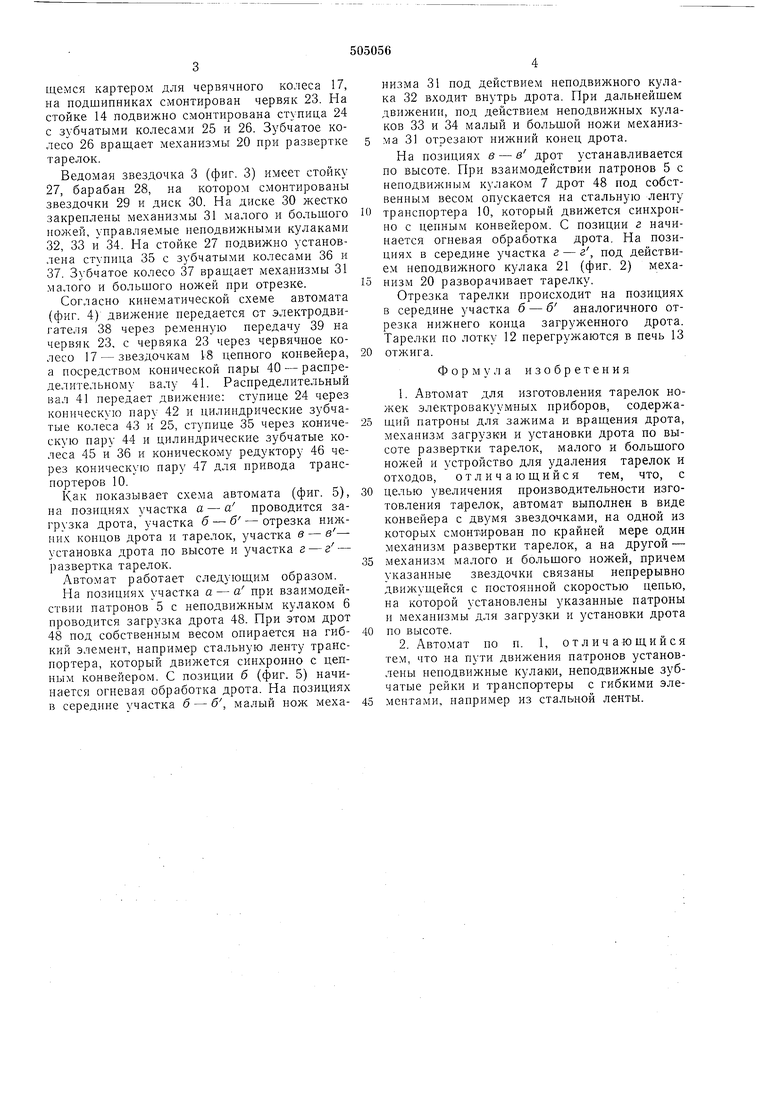
Ведущая звездочка 2 (фиг. 2) имеет стойку 14, внутри которой на подщипниках установлен вал 15. Па верхнем конце вала 15 смонтирован барабан 16, а на нижнем конце -
5 червячное колесо 17.
Па барабане 16 жестко закреплены звездочки 18 для привода цеш-i 4 с патронами 5 и диск 19, на котором установлены механизмы 20 развертки тарелок, управляемые непод0 вижным кулаком 21. В корпусе 22, являющемся картером для червячного колеса 17, на подшипниках смонтирован червяк 23. На стойке 14 подвижно смонтирована ступица 24 с зубчатыми колесами 25 и 26. Зубчатое колесо 26 вращает механизмы 20 при развертке тарелок.
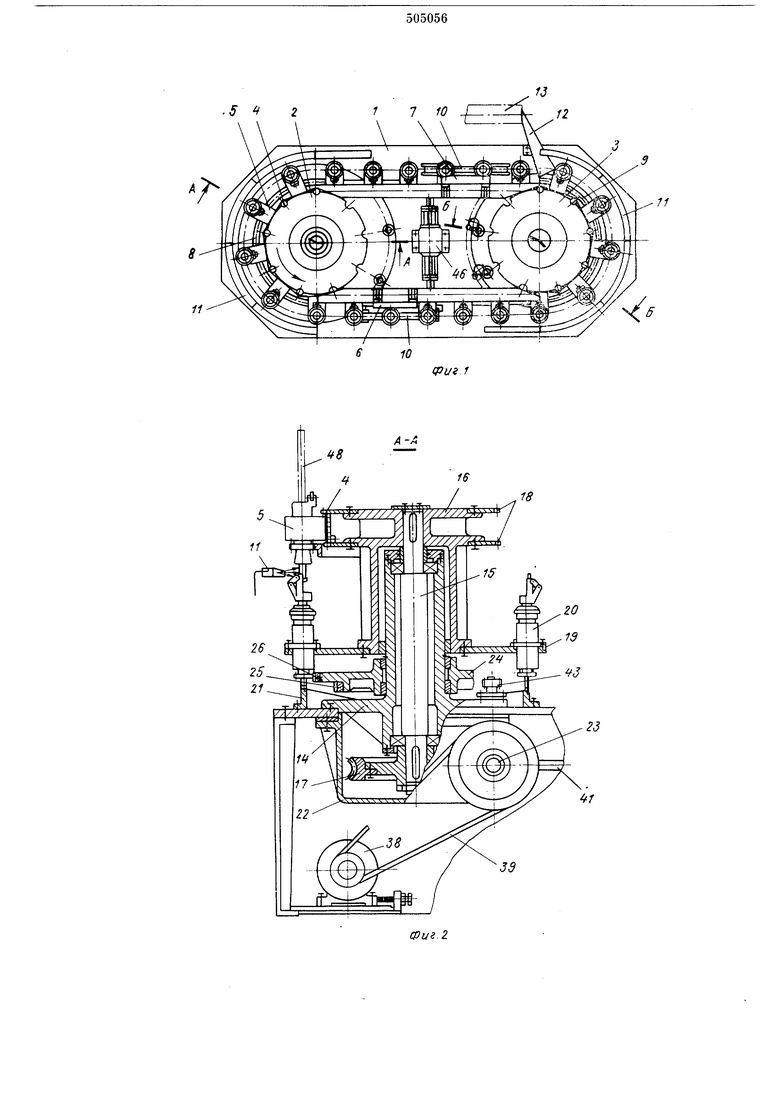
Ведомая звездочка 3 (фиг. 3) имеет стойку 27, барабан 28, на котором смонтированы звездочки 29 и диск 30. На диске 30 жестко закреплены механизмы 31 малого и большого ножей, управляемые неподвижными кулаками 32, 33 и 34. На стойке 27 подвижно установлена ступица 35 с зубчатыми колесами 36 и 37. Зубчатое колесо 37 вращает механизмы 31 малого и большого ножей нри отрезке.
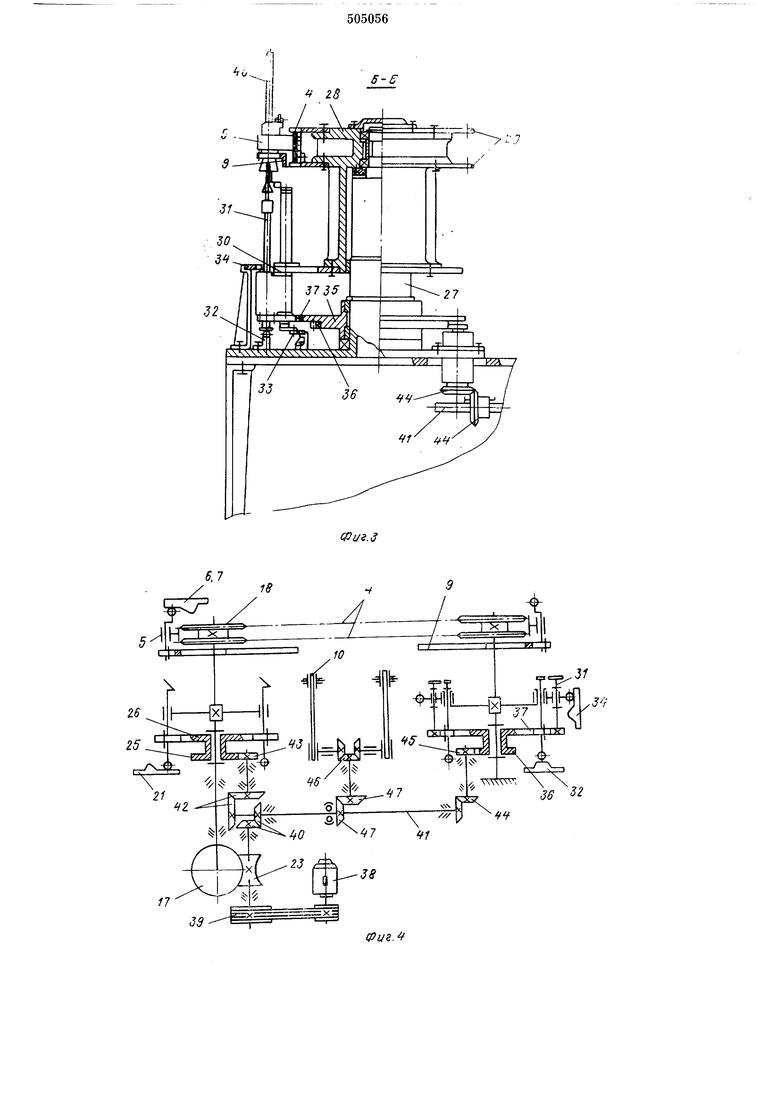
Согласно кинематической схеме автомата (фиг. 4) движение передается от электродвигателя 38 через ременную передачу 39 на червяк 23, с червяка 23 через червячное колесо 17 - звездочкам 18 цепного конвейера, а посредством конической пары 40 - распределительному валу 41. Распределительный вал 41 передает движение: ступице 24 через коническую пару 42 и цилиндрические зубчатые колеса 43 и 25, ступице 35 через коническую пару 44 и цилиндрические зубчатые колеса 45 и 36 и коническому редуктору 46 через коническую пару 47 для привода транспортеров 10.
Как показывает схема автомата (фиг. 5), па позициях участка а-а проводится загрузка дрота, участка б - б - отрезка нижних концов дрота и тарелок, участка в - в- установка дрота по высоте и участка г - г - развертка тарелок.
Автомат работает следующим образом.
На позициях участка а - а при взаимодействии патронов 5 с неподвижным кулаком 6 проводится загрузка дрота 48. При этом дрот 48 под собственным весом онирается на гибкий элемент, например стальную ленту транснортера, который движется синхронно с цецным конвейером. С позиции б (фиг. 5) начинается огневая обработка дрота. На позициях в середине участка б - б , малый нож механизма 31 под действием неподвижного кулака 32 входит внутрь дрота. При дальнейшем движении, под действием неподвижных кулаков 33 и 34 малый и большой иожи механизма 31 отрезают нижний конец дрота.
На позициях в - в дрот устанавливается по высоте. При взаимодействии патронов 5 с неподвиясным кулаком 7 дрот 48 под собственным весом опускается на стальную ленту
транспортера 10, который движется синхронно с цепным конвейером. С позиции г начинается огневая обработка дрота. На позициях в середине участка г - г , под действием неподвижного кулака 21 (фиг. 2) механизм 20 разворачивает тарелку.
Отрезка тарелки происходит на позициях в середине участка б - б аналогичного отрезка нижнего конца загруженного дрота. ТарелКИ по лотку 12 перегружаются в печь 13
отжига.
Формула изобретения
1. Автомат для изготовления тарелок ножек электровакуумных нриборов, содержаший патроны для зажима и вращения дрота, механизм загрузки и установки дрота по высоте развертки тарелок, малого и большого иожей и устройство для удаления тарелок и отходов, отличающийся тем, что, с
целью увеличения производительности изготовления тарелок, автомат выполнен в виде конвейера с двумя звездочками, на одной из которых смонтирован по крайней мере один механизм развертки тарелок, а на другой -
механизм малого и большого ножей, причем указанные звездочки связаны непрерывно движущейся с постоянной скоростью ценью, на которой установлены указанные патроны и механизмы для загрузки и установки дрота
по высоте.
2. Автомат по п. 1, отличающийся тем, что на пути движения патронов установлены неподвижные кулак1и, неподвижные зубчатые рейки и транспортеры с гибкими элементами, например из стальной ленты. 5
S10 2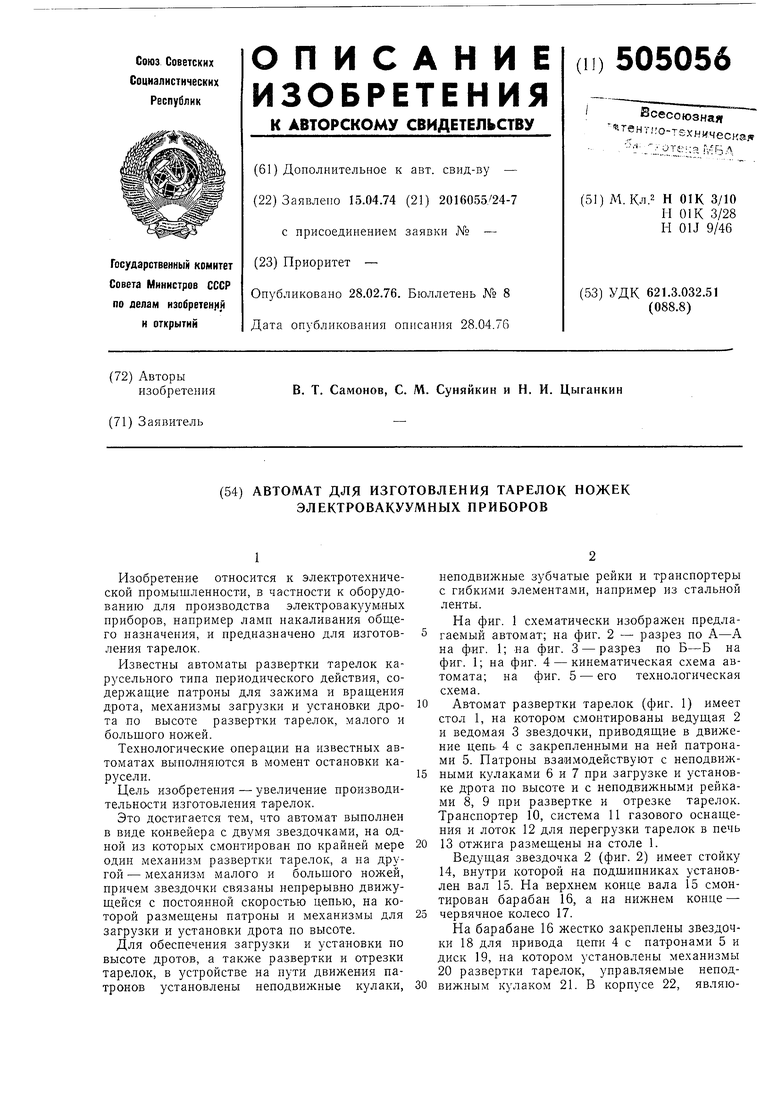
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для изготовления тарелок ножек электрических источников света | 1975 |
|
SU675485A1 |
| Машина для обработки стеклоизделий | 1977 |
|
SU941324A1 |
| Автомат для изготовления тарелок ножек для электрических источников света | 1986 |
|
SU1453478A1 |
| Автомат для изготовления тарелок ножек электрических источников света | 1982 |
|
SU1070627A1 |
| Автомат для изготовления стеклоизоляторов к цоколям ламп накаливания | 1973 |
|
SU496621A2 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ СТЕКЛОИЗОЛЯТОРОВ К цоколям ЛАМП НАКАЛИВАНИЯ | 1973 |
|
SU386459A1 |
| Механизм выгрузки цоколей | 1976 |
|
SU752557A1 |
| Автомат для сборки ножек электрических ламп | 1972 |
|
SU526971A1 |
| Автомат для монтажа ножек электровакуумных приборов | 1972 |
|
SU527772A1 |
| Машина для ориентации и резки плодов | 1978 |
|
SU774533A1 |
IS
18
r
ЗЭ
4(.„
5-5
/ j 36 32
