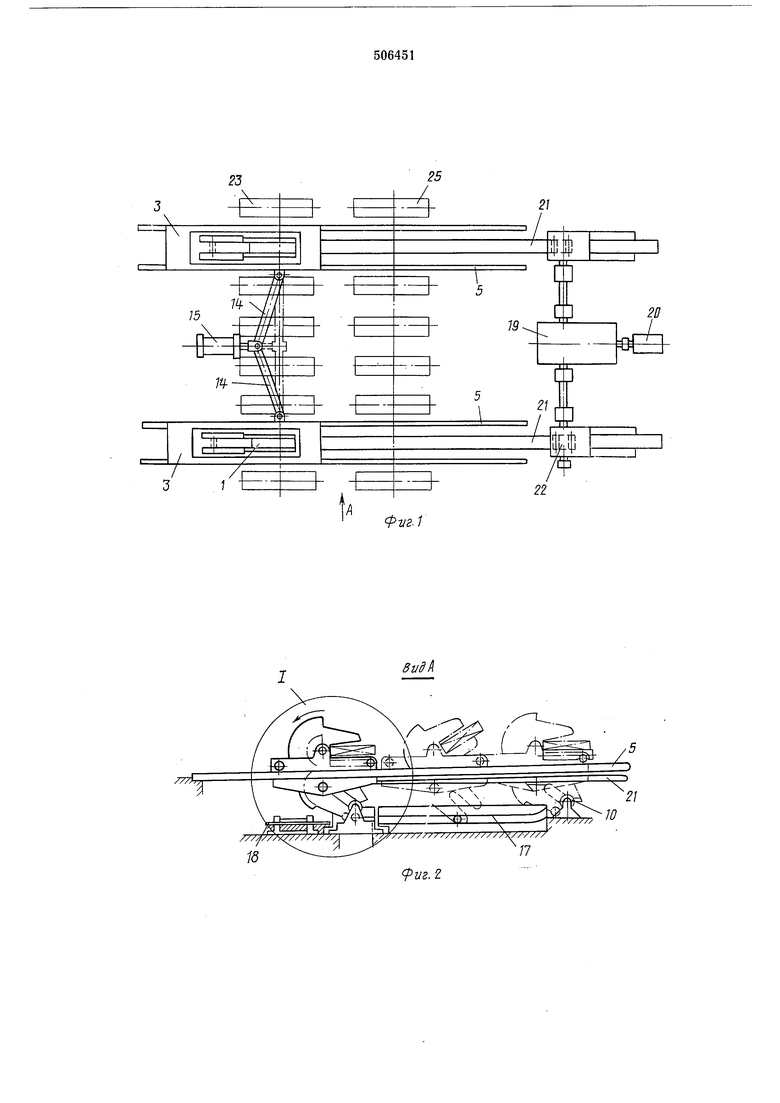
жет взаимодействовать со стационарным роликом 10 или с роликом И, корпус 12 которого смонтирован в направляющих 13 с возможностью перемещения. Корпус 12 имеет профильную направляющую. Корпуса 12 при помощи тяг 14 шарнирно соединены с приводом, например пневмоцилиндром 15. Кулачок 8 снабжен катком 16, который может взаимодействовать со стационарной профильной направляющей 17, рельсом 18 и с профильной направляющей корпуса 12 в случае, когда ролик И выведен из контакта с кулачком 8. Подвижные тележки 3 связаны с приводом 19, получающим крутящий момент от электродвигателя 20, например, при помощи реек 21, входящих в зацепление с шестернями 22 привода.
При выходе из контакта с роликом 10 или 11 кулачок 8 принимает такое положение, которое ему продиктуют профильные направляющие, так как в этом случае они взаимодействуют с катком 16 кулачка. При перемещении тележки 3 механизма в ремонтную позицию кулачок 8 сохраняет свое положение благодаря тому, что его каток 16 взаимодействует с рельсом 18.
Кантующий механизм работает следующим образом.
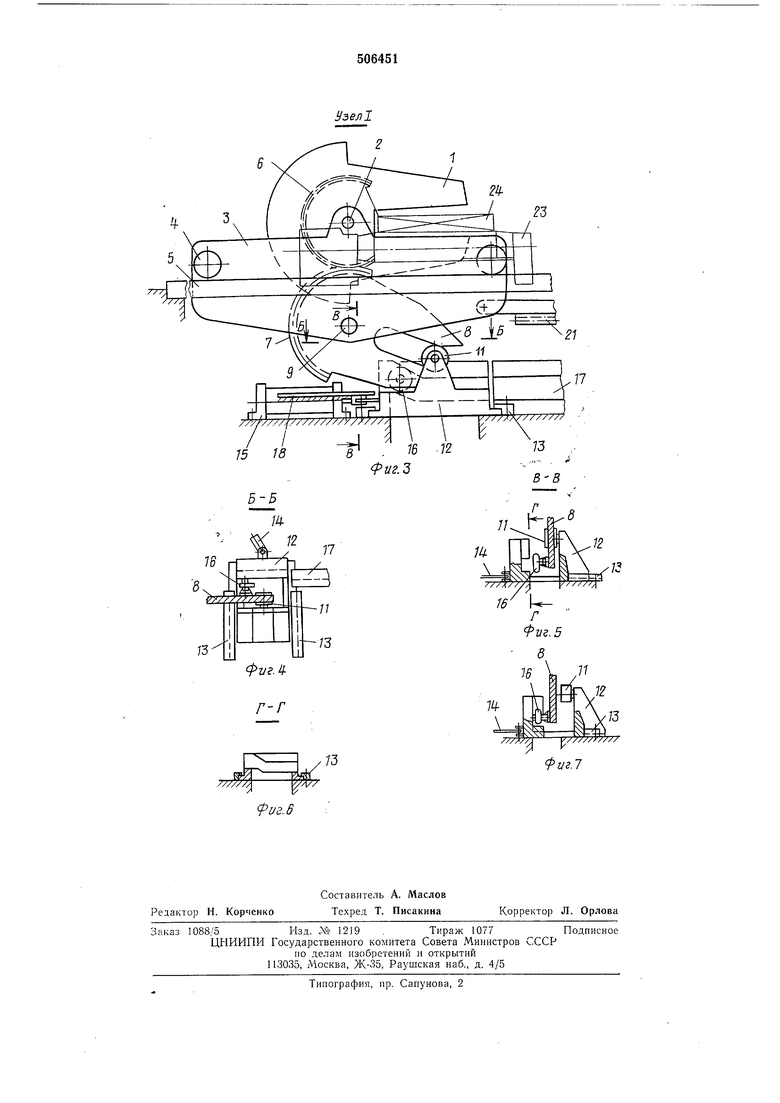
В исходном положении тележки 3 кантующего механизма расположены, например, в зоне рольганга 23. При этом пневмоцилиндр 15 через тяги 14 удерживает корпуса 12 в таком положении, что их ролики 11 находятся в сцеплении с кулачками 8. По роликам рольганга 23 изделие 24 подается в район кантовки и останавливается. Включается привод 19. При помощи реек 21 тележки 3 на направляющих 5 перемещаются направо. При этом движении кулачки 8 поворачиваются на своих осях 9 и тем самым через зубчатые секторы 6 и 7 вращают скобы 1 вместе с изделием, расположенным в их зевах. Передаточное число зубчатых секторов 6 и 7 выбирается таким, что за проходимый тележками 3 путь, равный длине бочки ролика рольганга, кантующие скобы 1 поворачиваются на 180° и укладывают скантованное изделие на тот же рольганг.
При необходимости переукладки изделия на другой рольганг (по требованиям сортировки, отбраковки, передачи на другие технологические операции и т. п.) включается пневмоцилиндр 15, шток которого перемещается вправо и тем самым через тяги 14 раздвигает корпуса 12 в направляющих 13 так, что их ролики 11 выходят из сцепления с кулачками 8. Однако при этом катки 16 кулачков 8 входят в сцепление с профильной направляющей корпусов 12. Затем посредством привода 19 и реек 21 тележки 3 кантующего механизма перемещаются в зону рольганга 25. В начальный период этого перемещения катки 16, взаимодействуя с наклонным участком профиля направляющей корпуса 12, поворачивают кулачки 8 на угол около 15°. Поворот кулачков 8 вызывает (через зубчатые секторы 6 и 7) поворот кантующих скоб 1, в результате чего последние снимают изделие с роликов рольганга. Дальнейшее перемещение тележки 3 в зону рольганга 25 сопровождается тем, что катки 16 кулачков 8 взаимодействуют с прямолинейными участками направляющих, благодаря чему изделие в зевах кантующих скоб 1 перемещается к рольгангу. При подходе тележки к рольгангу 25 катки 16, взаимодействуя с наклонным участком стационарной направляющей 17, поворачивают кулачки 8 в исходное положение, в результате чего скобы 1 тоже поворачиваются и плавно укладывают изделие на ролики рольганга.
Кантовка изделий на рольганге 25 осуществляется за счет того, что кулачки 8 при перемещепии тележек 3 (на пути, равном длине бочки рольганга) входят в сцепление со стационарным роликом 10.
Для обеспечения готовности механизма к очередной кантовке изделий на рольганге 23 необходимо механизм кантования возвратить в его зону и при помощи пневмоцилиндр а 15 ролики 11 ввести в сцепление с кулачками 8. При необходимости вывода механизма в ремонтную позицию тележки 3 перемещаются приводом налево. При этом катки 16 кулачков 8 катятся по рельсу 18.
Формула изобретения
Кантующий механизм по авт. св. № 457503,, отличающийся тем, что, с целью осуществления механизмом сортировки и переукладки изделий с одного транспортного органа на другой, подвижные корпуса роликов снабжены профильной направляющей, взаимодействующей с катком кулачка, а между роликами смонтированы профильные направляющие, также взаимодействующие с катками кулачков.
fpm-l
| название | год | авторы | номер документа |
|---|---|---|---|
| КАНТУЮЩИЙ МЕХАНИЗМи_-:Л.;и=и.:Л-!АНГ'5;;;.-п •:Гг1:-"Ч?Лй• .;_.1>&:.:^ . „,'\::;ii :u- Ч.Ш::brbjlHOYEKA i | 1971 |
|
SU318421A1 |
| Кантующий механизм | 1974 |
|
SU457503A1 |
| Устройство для кантовки и поперечного перемещения круглых и граненых слитков | 1974 |
|
SU533415A1 |
| Механизированная линия гибки и правки остряков | 1989 |
|
SU1704889A1 |
| Манипулятор ковочных вальцов | 1990 |
|
SU1756012A1 |
| Устройство для перемещения проката в линии отделки | 1990 |
|
SU1713704A1 |
| Кантователь | 1973 |
|
SU510285A1 |
| Кантователь | 1976 |
|
SU599873A2 |
| Кантователь сортового проката | 1980 |
|
SU1011292A1 |
| Кантователь труб | 1990 |
|
SU1726082A1 |
(///////
18
8t/d/
/7 //Х/У///У// ///////// II75 /5в иг.З 7Т /////У//// Фиг.7
