По завершении обработки детали в рабочей .ПОЗИЦИИ 6 вышеописанный дикл действия робота повторяется.
Формула изобретения
Промышленный робот для разгрузочно-загрузочных работ, содержащий нодвижную руку с захватной головкой, о т л и ч а ю щ и и с я тем, что, с целью повышения .производительности, оя снабжен промежуточным перегружателем с ячей.ка;ми для .деталей, устаиовленным на подвижной руке, причем ячейки перегружателя выполнены подвижными, например, от индивидуальных гидроцилиндров.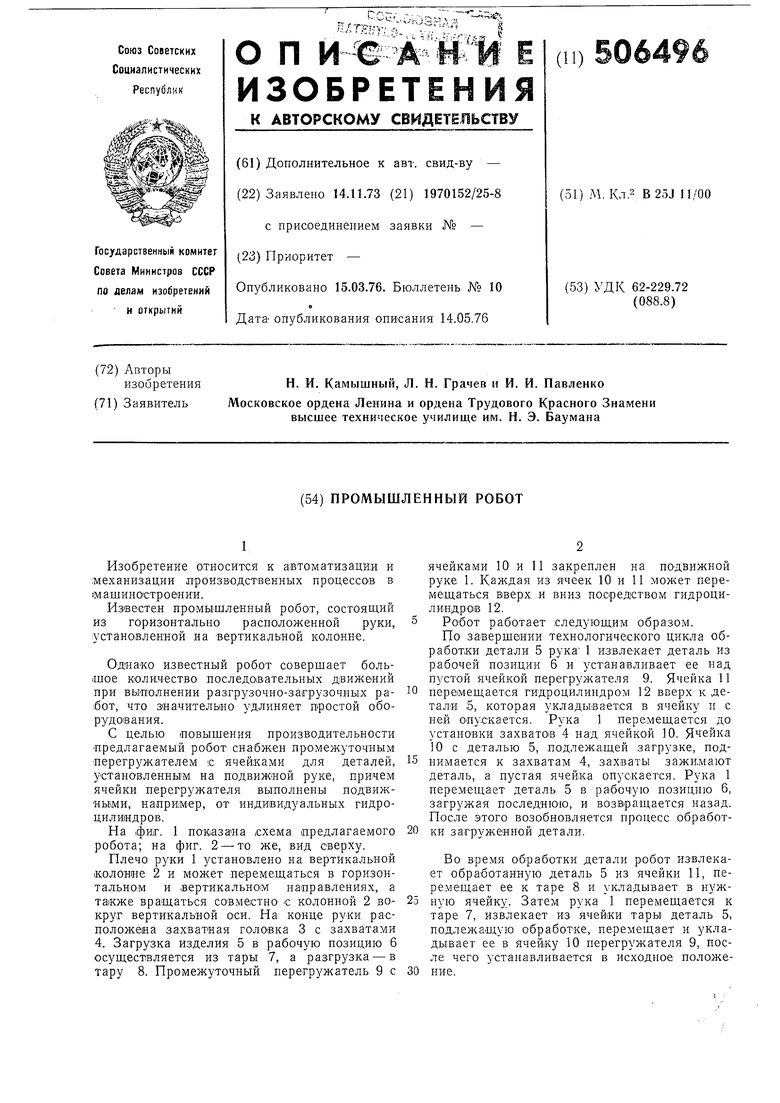
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1988 |
|
SU1530436A1 |
| Промышленный робот | 1985 |
|
SU1373562A1 |
| Промышленный робот | 1988 |
|
SU1616812A1 |
| Устройство для комплектации печатной корреспонденции | 1989 |
|
SU1678462A1 |
| Промышленный робот | 1986 |
|
SU1335446A1 |
| Манипулятор | 1982 |
|
SU1072989A1 |
| Роботизированный участок для обработки деталей | 1987 |
|
SU1416292A1 |
| Роботизированная линия горячей штамповки | 1982 |
|
SU1068265A1 |
| Устройство для автоматической смены инструментов | 1979 |
|
SU863303A1 |
| Способ уборки зернового сорго | 2022 |
|
RU2798242C1 |
иг.1
