сл
оо со ел
05
ьо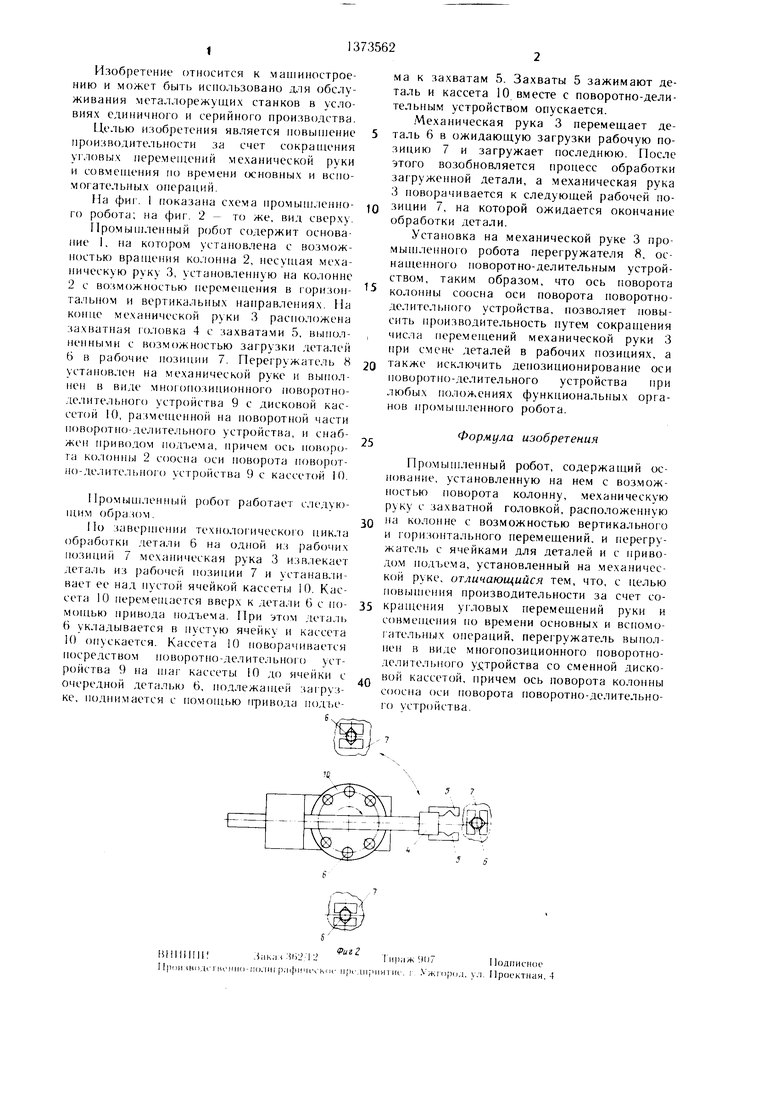
| название | год | авторы | номер документа |
|---|---|---|---|
| Робототехнический комплекс | 1987 |
|
SU1416244A1 |
| Многопозиционный магазин-накопитель | 1987 |
|
SU1531240A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Устройство для комплектации печатной корреспонденции | 1989 |
|
SU1678462A1 |
| Автоматизированная транспортно-накопительная система | 1987 |
|
SU1458163A2 |
| Автоматизированная линия для многопереходной листовой штамповки | 1988 |
|
SU1516198A1 |
| Магазинное устройство к промышленному роботу | 1985 |
|
SU1326374A1 |
| Магазинное устройство | 1986 |
|
SU1424919A1 |
| Многопозиционное поворотное приспособление | 1986 |
|
SU1404242A1 |
| Роботизированный технологический комплекс | 1986 |
|
SU1532148A1 |
Изобретение относится к машиностроению и может быть использовано для обслуживания металлорежущих станков в условиях единичного и серийного производства. Целью изобретения является ПОЕМЛИОНИС производительности промышленного робот; ui счет возможности обслуживания бо.и.пкип количества рабочих позиций. Упаиов.н н- ный на механической руке 3 псрсм ju/капмь 8 выполнен в виде многопозициониого ново ротно-делительного устройства со сменной кассетой 10, что позволяет обслуживать шч-- колько рабочих позиций 7 и производить разгрузку и загрузку каждой рабочей позиции 7 без поворота механической руки 3 за счет обеспечения соосности осей ii()B()- тов колонны 2 и поворотно-делительпого устройства 9. 2 ил.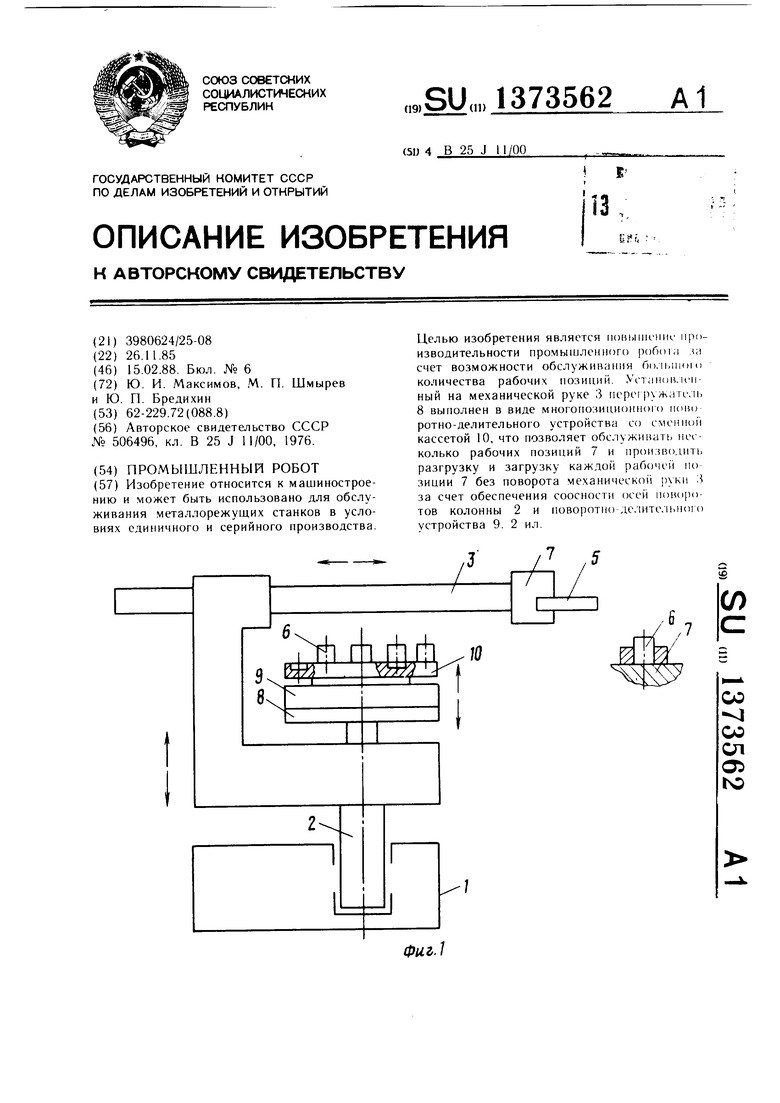
Фи1.1
Изобретение относится к машиностроению и может быть использовано для обслуживания мотал. о режущ их станков в условиях единичного и серийного производства.
Целью изобретения является новьлнение производительности за счет сокращения yiMOBbix перемещений механической руки и совменхения по времени скновных и всно- м огател ьн ы х онера ц и и.
На фиг. 1 показана схема нромьпиленно- го робота; на фиг. 2 - то же, вид сверху.
Промышленный робот содержит основание I. на котором установлена с возможностью вращения ко-лонна 2, несущая механическую руку 3, установленную на колонне 2 с возможностью перемещения в горизонтальном и вертикальных нанравлениях. Па конце механической руки 3 расположена захватная головка 4 с захвата.ми 5, выполненными с возможностью загрузки деталей 6 в рабочие позиции 7. Перегружатель 8 установлен на механической руке и выпол- в виде мнокяюзииионного поворотно- делительного устройства 9 с дисковой кассетой 10, размещенной на новоротиой части поворотно-делительного устройства, и снабжен приводом подъема, причем ось поворота колонпы 2 соосна оси поворота поворотно-делительного устройства 9 с кассетой 10.
Промышленный робот работает следую- П1им образом.
По завершении техп(.)логическо1О никла обработки детали 6 на одной из рабочих позиций 7 механическая рука 3 извлекает деталь из рабочей позиции 7 и устапавли- вает ее над нустой ячейкой кассеты 10. Кассета 10 перемеп1ается вверх к детали 6 с помощью привода подъема. При этом дегаль 6 укладывается в пустую ячейку и кассета К) опускается. Кассета 10 поворачивается посредством поворотно-делительного устройства 9 на таг кассеты 10 до ячейки с очередной деталью 6, подлежаП1ей загрузке, поднимается с помощью привода подъе6
ма к захватам 5. Захваты 5 зажимают деталь и кассета 10 вместе с поворотно-делительным устройством опускается.
Механическая рука 3 перемещает деталь 6 в ожидающую загрузки рабочую позицию 7 и загружает последнюю. После этого возобновляется процесс обработки загруже1щой детали, а механическая рука 3 поворачивается к следующей рабочей но- зиции 7, на которой ожидается окончание обработки детали.
Установка на механической руке 3 про- мьипленног О робота перегружателя 8, оснащенного поворотно-делительным устройством, таким образом, что ось поворота колонны соосна оси поворота поворотно- делительного устройства, позволяет повысить производительность путем сокращения числа перемещений механической руки 3 при смене деталей в рабочих позициях, а также исключить депозиционирование оси поворотно-делительного устройства при любых положениях функциональных органов промышленного робота.
25
Формула изобретения
Промышленный робот, содержащий основание, установленную на нем с воз.мож- р{остью поворота колонну, механическую руку с захватной головкой, расположенную
па колонне с возможностью вертикального и горизонтального перемещений, и перегружатель с ячейками для деталей и с приводом подъема, установленный на механической руке, отличающийся тем, что, с целью повышения производительности за счет сокрашения у| ловых перемещений руки и сов.мещения по вре.мени основных и вспомогательных операций, перегружатель выполнен в виде многопозиционного поворотно- делительного у ;тройства со сменной дисковой кассетой, приче.м ось поворота колонны соосна оси поворота поворотно-делительного устройства.
| Промышленный робот | 1973 |
|
SU506496A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
