ю
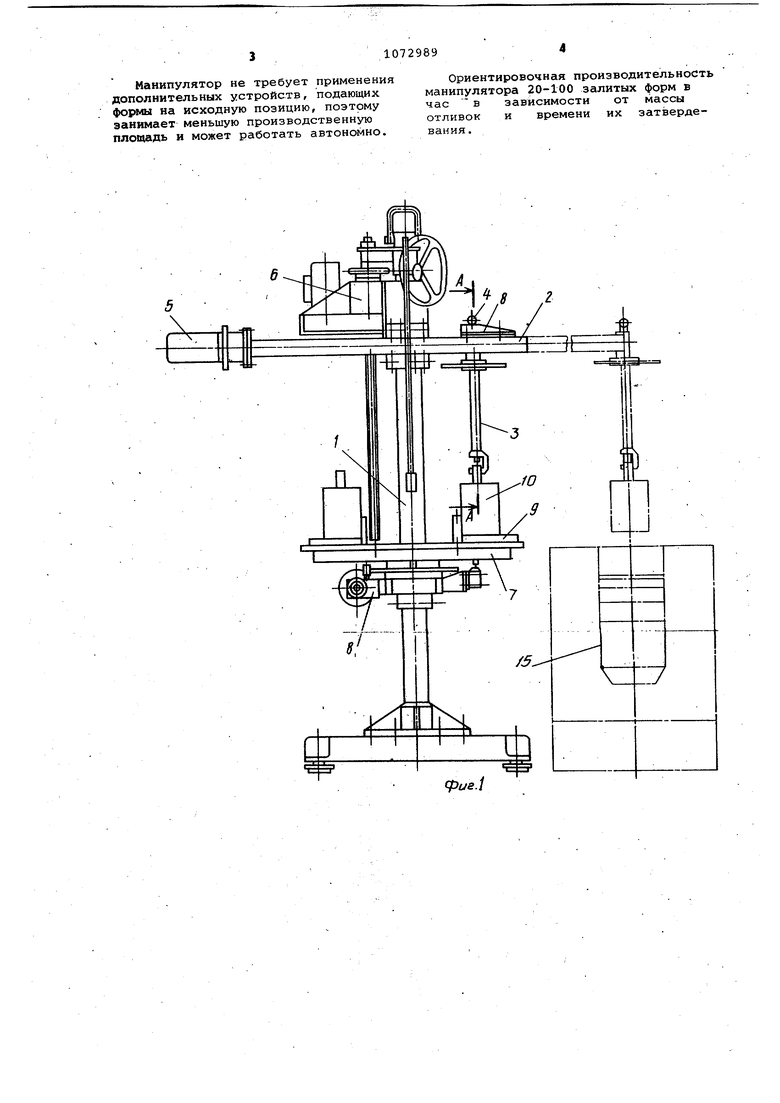
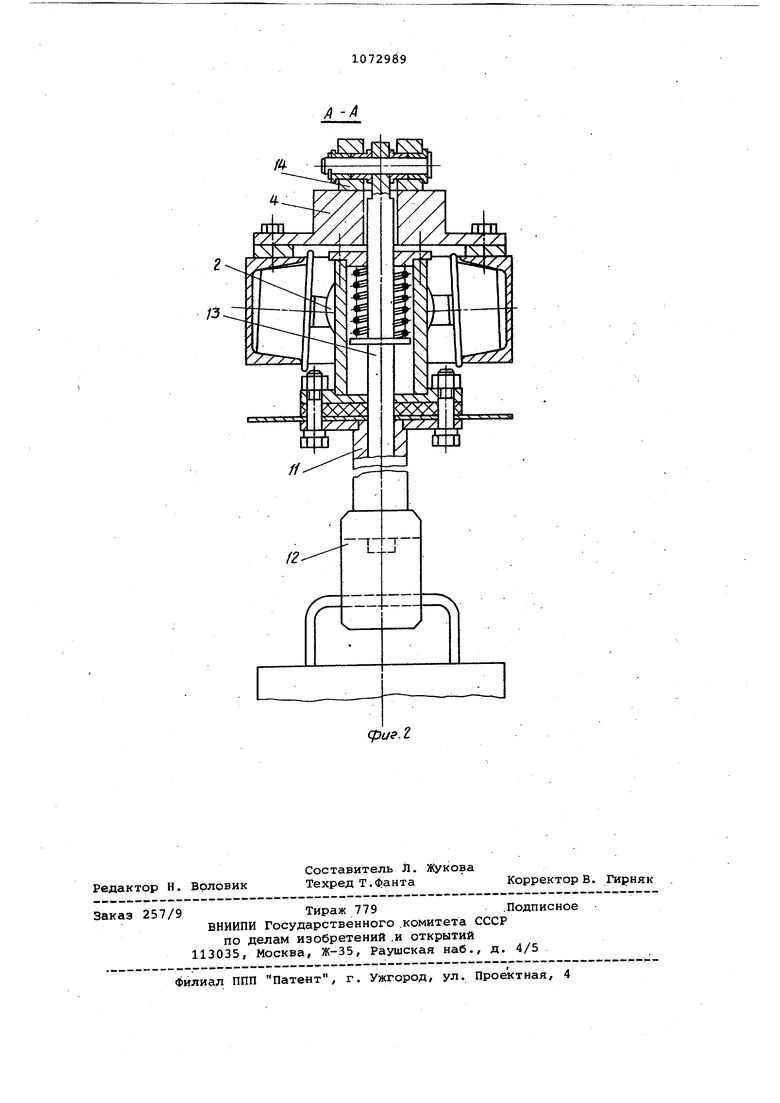
со СХ) ) Изобретение относится к литейному производству, в частности к меха низации и автоматизации процесса ли тья погружением. Известен промышленный робот моде РКТБ, включающий колонну и механиче кую руку с приводом 1. Однако при использовании робота в процессе литья погружением он име ет крайне ограниченные возможности и в промьшшенных условиях не дает п ложительного эффекта. Наиболее близким к изобретению я ляется прогФашпенный робот, содержащий колонну, установленную на ней механическую руку с захватом, приводы перемещения руки и промежуточный перегружатель с ячейками для де талей, имеюлдай высокую производител ность за счет сокращения количества движений при замене обрабатываемых деталей на станке f2 . Недостатке данного робота является невозможность ирпользования его для литья погружением из-за несовмещения, т.е. одновременного выполнения вспомогательных и машинных операций, относящихся к обработке детали. Цель изобретения - расширение те нологических возможностей. Поставленная цель достигается те что манипулятор, содержащий колонну установленную на ней механическую руку с захватом, приводы горизонтального и вертикального перемещения механической руки, снабжен столом, закрепленным на колонне с возможностью прерывистого поворота от привода. При этом стол снабжен теплоизоли уювдами подставками для форм, распо ложенньвити по окружности на расстояниях шага поворота стола. Захват выполнен в виде штанги с крюком и подпружиненного стержня, расположенного в штанге с возможностью взаимодействия одним концом с крюком и имеющего на другом конце ролики, при этом механическая рука снабжена клиновым копиром, закрепленным с возможностью взаимодействи с роликами. На фиг. 1 изображен манипулятор/ общий вид; на фиг. 2 - разрез А-А н ,фиг. 1. Манипулятор содержит колонну 1, механическую руку 2 с захватом 3 и клиновым копиром 4, привод 5 горизонтального перемещения руки 2, при вод б вертикального перемещения рук 2, поворотный стол 7, закрепленный на. колонне с возможностью прерывистого поворота, и привод 8 перемещения стола 7, на котором размещены теплоизолирующие подставки 9 для форм 10. Захват выполнен в виде шта .ги 11 с крюком 12.и подпружиненного стержня 13 с роликами 14, расположенного в штанге. Для заливки форм установлен тигель 15 с расплавом. Манипулятор работает следующим образом. В исходном положении на поворотном столе 7 стоят на теплоизолирующих подставках 9 литейные формы 10. Захват 3 при этом отведен в сторону. При включении манипулятора в работу захват 3 на подвижной руке 2 перемещается к столу и входит в зацепление со скобой формы 10. Рука с помощью привода 6 вертикального перемещения поднимается по колонне 1 и, снимая форму 10 со стола 7, перемещается в горизонтальном направлении к тиглю 15с расплавом. В процессе выдвижения руки с захватом ролики 14, скатываясь по клиновому копиру 4, освобождают подоружиненный стержень 13, который под действием пружины опускается вниз и зажимает скобу формы. Рука с помощью привода б вертикального перемещения опускается вниз по колонне и погружает - .форму 10 в расплав до определенного уровня. После технол|огической выдержки формы 10 в расплаве рука 2 совершает движения в обратной последовательности: перемещает форму 10 вверх, затем горизонтально к столу, опуска ет ее на стол 7 на подставку 9 и отводит расжатый захват в сторону. При этом в процессе горизонтального перемещения руки ролики 14 набегают на клиновый копир 4 и.поднимают стер жень 13, разжимая захват 3. После того, как захват 3, освободившись от формы, отходит в сторону, привод 8 поворачивает стол на один угловой шаг и перемещает очередную форму на исходную позицию. Далее цикл работы манипулятора повторяется. Предлагаемое изобретение позволяет повысить производительность процесса литья погружением, наличие поворотного стола позволяет заблаговременно разместить в фиксированном положении много форм, например на одну плавку, что в процессе работы исключает необходимость угловых поворотов руки. Рука работает только в одной плоскости, перемещая форму на минимальное расстояние. Поворот стола при подаче очередной формц на исходную позицию происходит йлстро, так как угловой шаг небольшой, например 1/10 круга или меньше. Повышению . производительности спо собствует также имеющаяся возможность регулирования стола по высоте в соответствий с уровнем краев печи, вследствие обеспечивается минилальная длинапути перемещения формы.
Манипулятор не требует применения дополнительных устройств, подающих формы на исходную позицию, поэтому занимает меньшую производственную площадь и может работать автономно.
Ориентировочная производительность манипулятора 20-100 залитых форм в час в зависимости от массы отливок и времени их затвердевания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1985 |
|
SU1256855A2 |
| Установка для изготовления биметаллических деталей | 1982 |
|
SU1069941A1 |
| Устройство для подачи заготовок | 1988 |
|
SU1576276A1 |
| МАНИПУЛЯТОР | 1992 |
|
RU2022772C1 |
| Манипулятор к прессу | 1986 |
|
SU1339011A1 |
| КОЛЛАБОРАТИВНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ПЕРЕМЕЩЕНИЯ ПРОДУКЦИИ ПОДВЕСНОГО РАЗМЕЩЕНИЯ | 2024 |
|
RU2841086C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Сверлильный робот | 1985 |
|
SU1321578A1 |
| Индукционная установка | 1981 |
|
SU1057556A1 |
1. МАНИПУЛЯТОР, содержащий колонну, установленную на ней механическую руку с захватом, приводы горизонтального и вертикального перемещения руки, отличающийся тем, что, с целью расширения технологических возможностей он снабжен столом, закрепленным на колонне с возможностью прерывистого поворота от привода. 2.Манипулятор по п. 1, отличающийся тем, что стол снабжен теплоизолирующими подставками для форм, расположенными по окружности на расстоянии шага поворота стола. 3.Манипулятор по п. 1, отличающийся тем, что захват выполнен в видештанги с крюком и .подпружиненнсз(го стержня, расположенного в штанге с возможностью взаимодействия- одним концом с крюком и имеющего на другом конце ролики, при этом механическая рука снабжена кли- § HOBbBvi копиром, закрепленным с возмож (Л ностью взаимодействия с роликами.
/4
//
i2q3u9.l
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Каталог | |||
| М., Минстанкопром, 1978, с | |||
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Промышленный робот | 1973 |
|
SU506496A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
