15
6 - 13 14 12
05 N3
СО ьо
И;(обретение относится к машинострое- jiii .n), а именно к конструкции роботизирован- noio участка для обработки деталей, который может быть использован, например, при ;сварке деталей, объемной штамповке и т.п. Цель изобретения - повышение производительности путем сокраш.ения времени на выгрузку обработанной детали с рабочей позиции на отводящий транспортер.
На фиг. 1 изображен роботизированный
: участок, вид свер.ху; на фиг. 2 - разрез
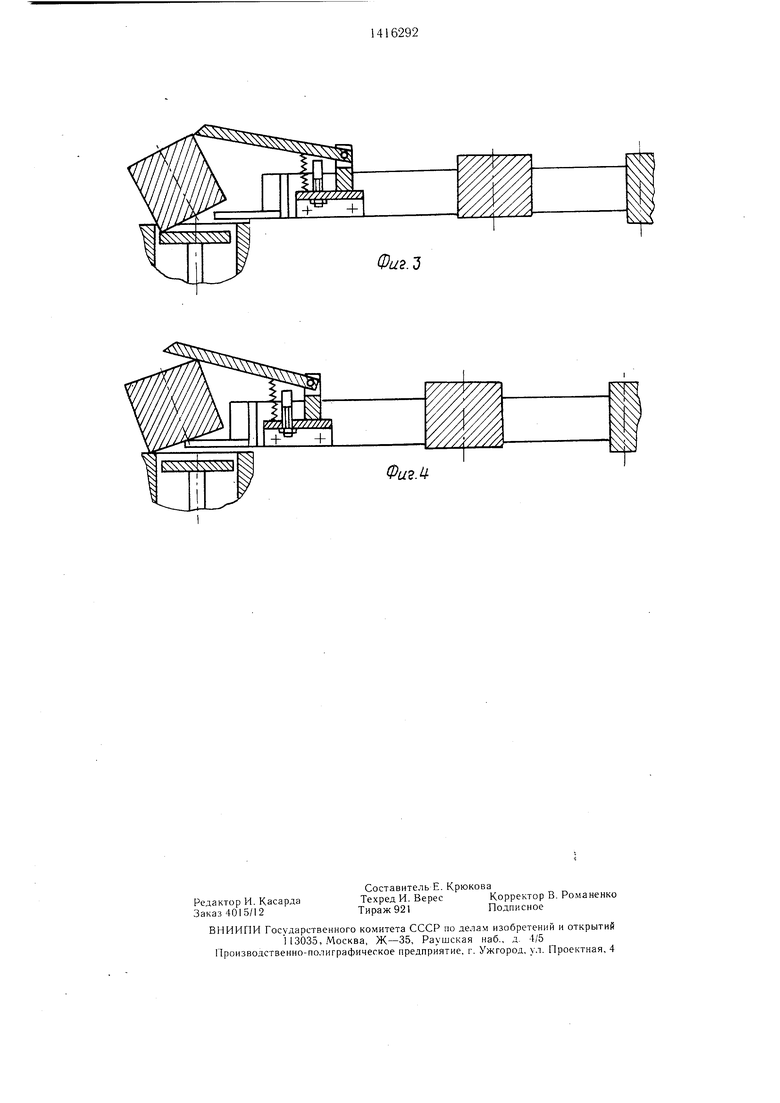
А-А на фиг. 1; на фиг. 3 и 4 - то же, в
резличны.ч фазах выгрузки обработанных
деталей.
Роботизированный участок для обработки деталей содержит смонтированные на I основании между подводящим 1 и отводя- I шим 2 транспортерами рабочую позицию 3 I и перегружатель деталей 4 с подводящего I транспортера 1 на рабочую позицию 3 и с I рабочей позиции на отводящий транспор- I тер 2.
I Перегружатель выполнен в виде выдвиж- i ной руки 5 робота с поворотными рычагами i 6, снабженными губками 7 для захвата деталей 4. Рука 5 робота оснащена опрокидывателем 8 и выталкивателем 9. Последний выполнен в виде планок, закрепленных с помощью 1ластин 10 и 11 на губках 7 и расположенных параллельно основанию.
Опрокидыватель 8 выполнен в виде упора смонтированного на одной из планок выталкивателя 9 с возможностью поворота на оси 12 в плоскости, перпендикулярной основанию, и подпружиненного пружиной 13 относительно этой планки выталкивателя 9. Опрокидыватель 8 в исходном положении опирается на регулировочный винт 14. Готовая деталь обозначена позицией 15.
Роботизированный участок для обработки деталей работает следующим образом.
Деталь 4 по транспортеру 1 попадает на исходную позицию, после чего зажимается губками 7 руки 5 робота и переносится на рабочую позицию 3. При этом опрокидыватель 8 упирается в обработанную деталь 15, находящуюся на рабочей позиции 3, в результате чего она наклоняется.
При дальнейшем движении руки 5 робота
планки выталкивателя 9 попадают под нижний торец детали 15 и она сбрасывается на отводящий транспортер 2, а деталь 4 оказывается над рабочей позицией 3, после чего губки 7 руки 5 робота раскрываются и
деталь 4 укладывается на рабочую позицию 3. Затем цикл работы роботизированного участка повторяется.
Использование предлагаемого изобретения повышает производительность благодаря сокращению времени на выгрузку обработанной детали с рабочей позиции на отводящий транспортер и установке детали в рабочую позицию за одно движение руки робота.
20
Формула изобретения
Роботизированный участок для обработки деталей, содержащий смонтированные на основании между подводящим и отводящим транспортерами рабочую позицию и перегружатель деталей с подводящего транспортера на рабочую позицию и с рабочей позиции на отводящий транспортер, выполненный в виде выдвижной руки робота с поворотными рычагами, снабженными губками
для захвата деталей, отличающийся тем, что, с целью повышения производительности путем сокращения времени на выгрузку обработанной детали с рабочей позиции на отводящий транспортер, рука робота оснащена опрокидывателем и выталкивателем деталей, при этом выталкиватель деталей выполнен в виде планок, закрепленных на за хватах и расположенных-параллельно основанию, а опрокидыватель выполнен в виде упора, смонтированного на одной из планок
с возможностью поворота в плоскости, перпендикулярной основанию, и подпружиненного относительно этой планки.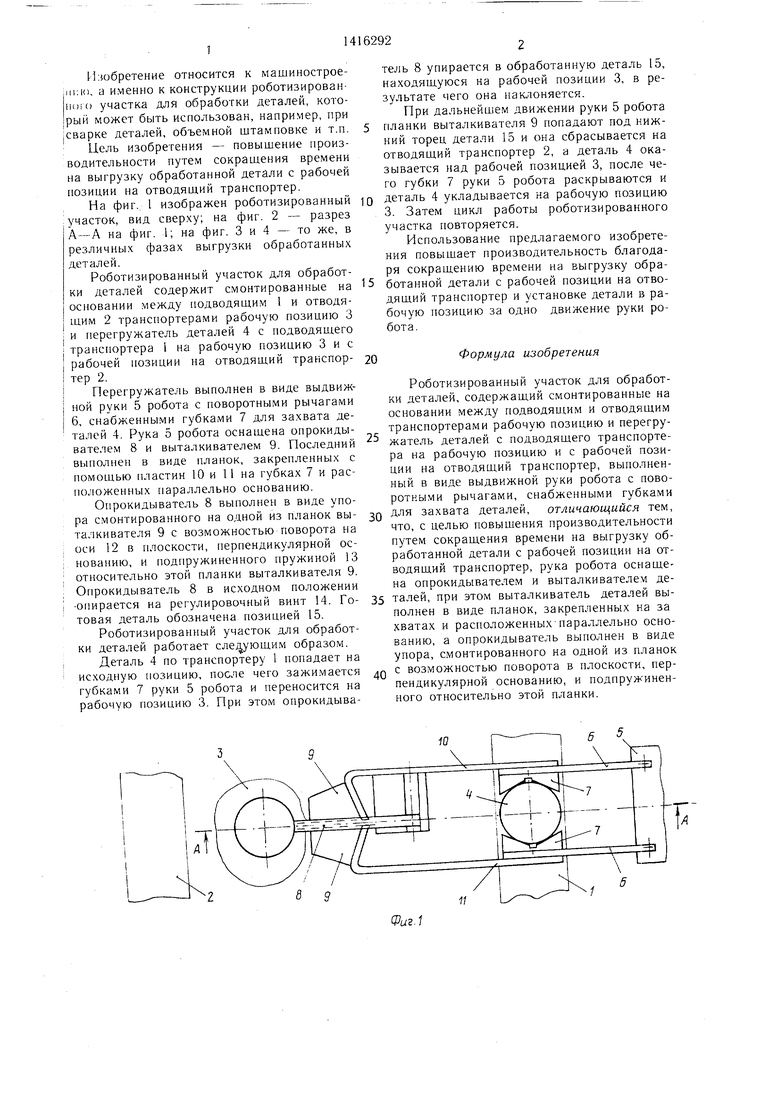
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи заготовок и удаления изделий из штампа | 1989 |
|
SU1738440A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Гибкая производственная система для обработки деталей типа валов | 1986 |
|
SU1371868A1 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| Токарный роботизированный технологический комплекс | 1985 |
|
SU1291291A1 |
| Комплекс плоскошлифовальный автоматический для двухсторонней обработки деталей | 1983 |
|
SU1183361A1 |
| Промышленный робот | 1986 |
|
SU1348166A1 |
| Загрузочное устройство | 1990 |
|
SU1756105A1 |
| Автоматическая линия для обработки деталей типа валов | 1983 |
|
SU1175672A1 |
| МЕХАНИЗМ ЗАГРУЗКИ И ВЫГРУЗКИ | 1972 |
|
SU344961A1 |
Изобретение относится к области ма шиностроения, а именно к конструкции роботизированного участка для обработки деталей, который может быть использован, например, при сварке деталей, объемной штамповке и т.п.. Цель изобретения - повышение производительности. Роботизированный участок содержит смонтированные на основании между подводяш.им 1 и отводящим 2 транспортерами рабочую позицию 3, перегружатель деталей 4 с подводящего транспортера на рабочую позицию 3, выгрузку обработанной детали 15 с рабочей позиции 3 на отводящий транспортер. При движении руки робота 5 с зажатой деталью 4 опрокидыватель 8 упирается в обработанную деталь 15, в результате чего она наклоняется. Планки выталкивателя 9 попадают под нижний торец детали 15, и она сбрасывается на отводящий транспортер 2. Деталь 4 оказывается над рабочей позицией 3. После этого губки руки 5 робота раскрываются и деталь 4 укладывается на рабочую позицию 3, что сокращает время на выгрузку летали 15 с рабочей позиции 3. 4 ил. (Л
Фи2.
| Владзиевский А | |||
| П | |||
| Автоматические линии в машиностроении, т | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
| I, 32. | |||
