жестко установленным через полукольцо 1Г на шейку цапфы поперечной балки траяагора,
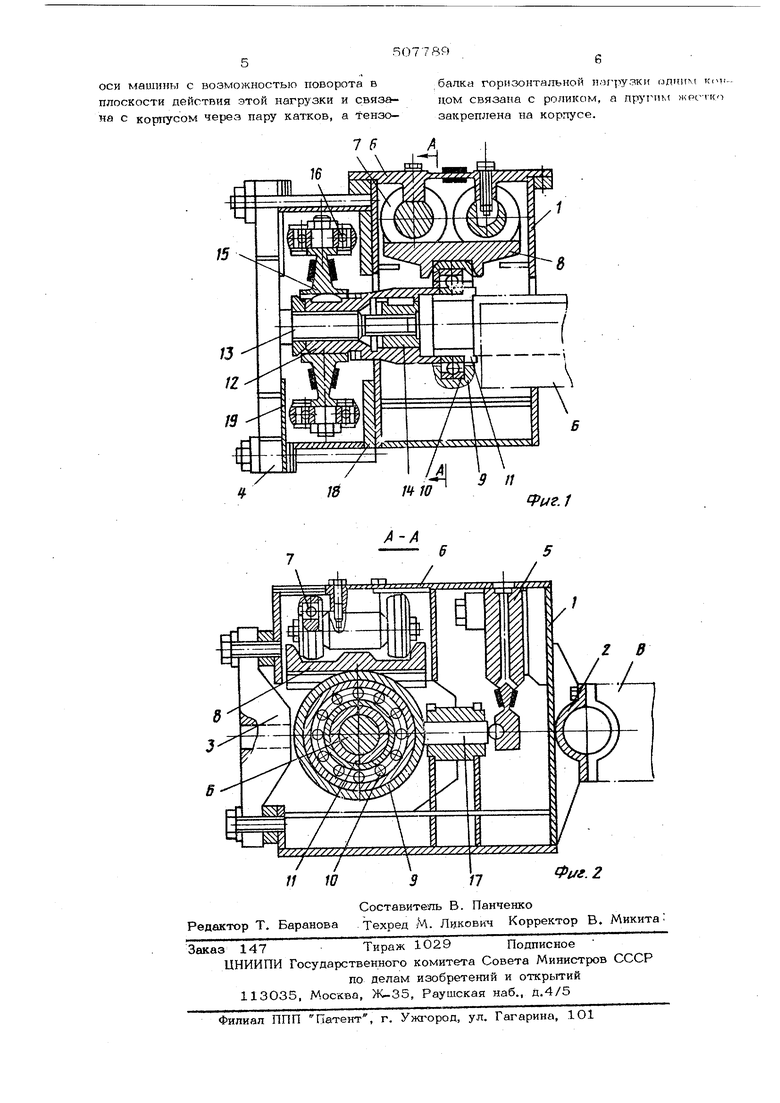
Стакан 12 с болтом 13, ввинченным в кругпую гайку 14, предотвращают смещение подшипника Юс роликом 9 вдоль поперечной балки. Гайка 14 жестко упирает с« Б торец поперечной балки. Стакан 12 удерживвется от прокручивания шпонкой, Наружный конеп стакана имеет овальную форму, на него устанавливается двусторонняя гензобапка 15 осевой нагрузки на катках 16, аналогичных каткам ,7. Между поддерживак FisiM роликом 9 и тенэобалкой 5 в гнезде нахо- палец 17, передающий толкающее усилие тягача полуприцепа.
При исследовании для замера составпя- юп1их сил, действующих на тягач со стороны полуприцепа,; используются два тензобло.ка: один устанавливается на первую цапфу поперечной балки Б тягача, другой левую. Корпус 1 тензоблоков крышками 2 соединяют с обхватьгоающей рамой, что обеспечивает взаимосвязь полуприцепа и тенэоблокоБ с тягачом. Силовую взаимосвязь рассмотрим аа примере одного тенаоблока,
Тензоблок работает следующим образом. Вертикальные нагрузки, возникающие от массы полуприцепа и сопротивления рабочего оборудования, воспринимаются тензобалкой 6 и передаются катками 7 через плавающий упор 8 на поддерживающий ролик 9 поперечной балки тягача. В результате нагрузки происходит деформация те№зобалки 6, которая вызывает разбаланс электрического моста, что ведет к прот&-. Кению тока по гальванометрам осциллографа. При работе по безусилительной электрической схеме необходимо, чтобы наклейка тензодатчикоБ на крышке производилась по cj.sfvie полного моста, асечение этого ЗЧистка крышки обеспечивало необходимую дагюрмагдаю и разбаланс его.
Земер боковых сил. В начальный мо- (Viesj-r движения машины при возникновении бс;;.:овых -сил, действующих на тягач, обхв,атывающая рама В с корпусом 1 начинает лсрйДБИгаться (перекатываться) на катках 7 по верхнему пазу плавающего упора 8. Зелнчина свободного перемещения равна зезору между катками 16 и боковой стен-; т.ой 18 корпуса 1 или боковой--стенкой 19| paivSH 4 (зазор .4 -г ), что зависит j направления действующих боковых сил, j После свободного перемещения стенка 18.; л.ортуса 1 или 19 рамка 4 через катки 16; передает боковые, наг рузки двусторонней 15, а последняя через стакан 12 и поперечную балку Б - тягачу.
Тензобалка 15 в плоскости, перпендикулярной к продольным осям опорных поверхностей тягача, имеет возможность некоторого качания (наклона), что обеспечивает
равномерность нагружения ее обоих концов. Это достигается приданием овальной формы поверхности наружного конца стакана 12 и применением сферической шайбы для болта 13. Наличие катков 7 и 16 и ролика 9 обеспечивает поворот обхватывающей рамы вокруг поперечной балки тягача без влияния сил трения на боковую нагрузку и деформацию тензобалки.
Замер продольных сил. Начальный момент движения тягача вперед поддерживающий ролик 9 на шарикоподщйпнике 10 перекатывается по нижнему пазу плавающего упора 8 и толкает палец 17. Свободное перекатывание ролика происходит до тех пор, пока палец не достигнет щарового упора тенаобалки 5 (свободный ход - 4-6 мм), которая, в свою очередь, через корпус 1 воспринимает продольную составляюхцую сопротивления полуприцепа и производит его перемещение вперед.
Для замера продольных усилий при движении машинь( назад необходимо тензобалку 5 и палец 17 установить на рамку 3, которая имеет для этого специальные посадочные места, или же дополнительно устанавливать тензобалКу на указанные места одновременно с течзобалкой 15.
Тензобалки 5, 6 и 13 легкосъемные и обеспечивают измерение ортогональных составляющих силы, наличие плавающего упора 8, каткоп 7 и 16 и поддерживающего ролика 9 исключает влияние перекосов обхватывающей рамы и трения на точность измерю ния.
Формула изобретения
Тензометрическое устройство для пространственного динамометрирования сельскохозяйственных мащин, содержащее неподвижный корпус, связанный с осью машины тремя взаимно-перпендикулярными тензометрическими балками, отличающееся тем, что, с целью повышения точности и надежности измерения оносанаб-
жено плаваюитим упором, роликом, устано&ленным на оси динамометрируемой машины, и тремя парами катков, причем тензобалка вертикальной нагрузки связана с роликом через плавающий упор и две пары катков,
{тензобалка осевой нагрузки установлена на
| название | год | авторы | номер документа |
|---|---|---|---|
| Автопоезд | 1989 |
|
SU1689185A1 |
| Устройство для поворота колес полуприцепа транспортного средства | 1982 |
|
SU1039782A1 |
| ПЕРЕГРУЗОЧНАЯ СИСТЕМА | 1997 |
|
RU2191714C2 |
| Рабочий орган бульдозера | 1977 |
|
SU692944A1 |
| Автопоезд для перевозки грузов | 1989 |
|
SU1659281A1 |
| Сочлененное транспортное средство для перевозки крупногабаритных грузов | 1981 |
|
SU962083A1 |
| Автопоезд | 1981 |
|
SU998206A1 |
| ДОРОЖНО-РЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА | 1990 |
|
RU2110427C1 |
| Сцепное устройство полуприцепа и грузовой платформы автопоезда | 1989 |
|
SU1614835A1 |
| Транспортное средство для перевозки тяжеловесных крупногабаритных грузов | 1973 |
|
SU695864A1 |
