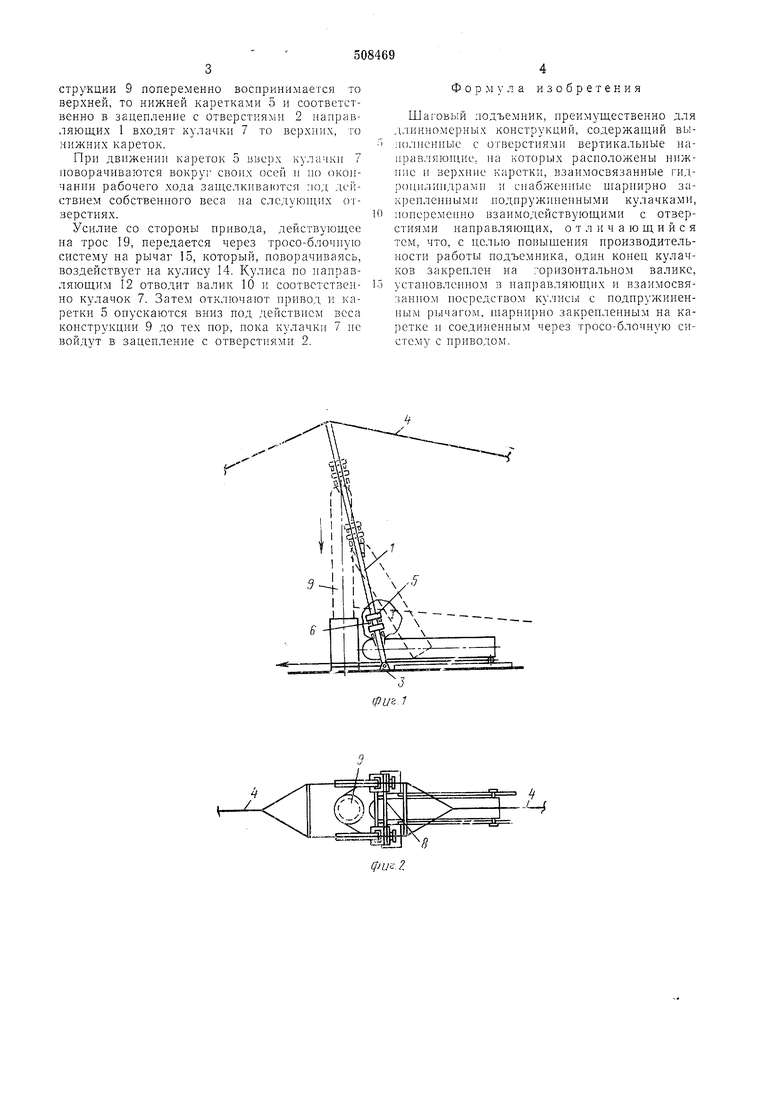
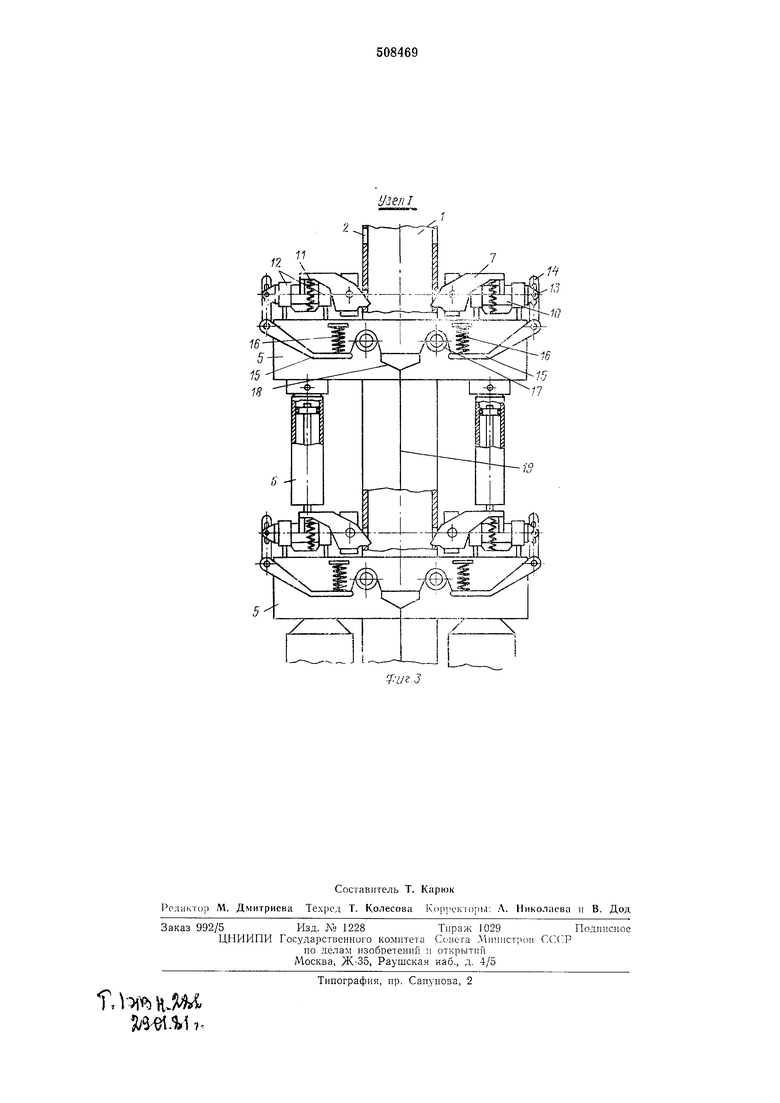
Изобретение относится к подъемно-транспортному машиностроению и люжет быть использовано в шаговых подъемниках. Известен шаговый подъемник для длинномерных конструкций, содержащий выполненные с отверстиями вертикальные наиравляюгцие, на которых расположены нижние и верхние каретки, взаимосвязанные гидроцилиндрами и снабженные шарнирно закреиленными подпружиненными кулачками, попеременно взаимодействующими с отверстиями направляющих. Однако для известпо1о подъемника характерна низкая производительность, обусловленная отсутствием возможности неремен1ения траверсы вниз. Цель изобретения - новысить производительность работы подъемника. Это достигается тем, что один конец кулачков закреплен на горизонтальном валике, установленном в направляющих и взаимосвязанном посредством кулисы с подпружиненным рычагом, шарнирпо закрепленным на каретке и соединенным через тросо-блочпую систему с приводом. На фиг. 1 изображеи предлагаемый шаговый подъемник, общий вид; на фиг. 2 - то же, вид сверху; па фиг. 3 - узел I на фиг. 1. Иодъемник содержит вертикальные направляющие 1, выполненные с отверстиями 2, опирающиеся на шарниры 3 и удерживаемые в нужном полол ении вантами 4. На наиравляющпх установлены верхняя и ннлшяя каретки 5. взаимосвязанные гидроцилиндрами 6 и снабженные щарнирно закрепленными кулачками 7, поочередно взаимодействующими с отверстиями 2. Каретки 5 соединены между собой траверсой 8, к которой кренится поднимаемая конструкция 9. Кулачки 7 одним концом закреплены )ia го)1г-юнтальных валиках 10, с которыми они также взанмосвязаны нружиной 11. Валики И) установлен 1)1 в направляющих 12, выполненных в виде ироу1пии. На одном конце валпкон смонтирован иа.тец 13, установленный в прорези кулисы 14, второй конец которой жестко соединен с шарнирно закрепленным на каретке 5 рычагом 15, нодпружиненным пружиной 16. Другой конец рычага 15 соединен с приводом через тросо-блочную систему, содержащую гибкую тягу, пропущенную через блок 17 и связанную через траверсу 18 с тросом 19. При этом унравляющие тросы 19 могут быть связаны между собой на верхних и каретках иоиарно н управляться одновременно. Подъемник работает следующим образом. При подъеме в зависимости от хода порщия гидроцилиндров 6 вес от поднимаемой конструкции 9 попеременно воспринимается то верхней, то нижней каретками 5 и соответственно в зацепление с отверстиями 2 направляющих 1 входят кулачки 7 то верхних, то нижних кареток.
При движении ка)еток 5 вьсрх кулачки 7 поворачиваются вокруг своих осей и по окопчании рабочего хода заи1,елкива отся под действием собственного веса ia следуюииьх отверстиях.
Усилие со стороны привода, действующее на трос 19, передается через тросо-блочпую систему на рычаг 15, который, поворачиваясь, воздействует на кулису 14. Кулиса по направляющим 12 отводит валик 10 и соответственно кулачок 7. Затем отключают привод и каретки 5 опускаются вниз под действием веса 1соиструкции 9 до тех пор, пока кулачки 7 не войдут в зацепление с отверстиями 2.
Формула изобретения
Шаговый подъемник, преимущественно для д;шнномерных конструкций, содержащий вы:к)лнснные с отверстиями вертикальные )iaиравляюп ие. на которых расиоложены нижliHC и верхние каретки, взаимосвязанные гидроцилипдрами и снабженные шариирпо закреи лепным иодпружинепными кулачками,
иопеременно взаимодействующими с отверстиями нанравляющих, отличающийся тем, что, с целью повышения производительпости работы подъемника, один конец кулачков закреплен на горизонтальном валике,
установленном в направляющих и взаимосвязаппол1 посредством кулисы с подпружиненным рычагом, и.арни)но закрепленным на каретке и соединенным через тросо-блочную систему с приводом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для сварки электрозаклепками | 1978 |
|
SU827285A1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| Стеллаж для сыра | 1988 |
|
SU1519600A1 |
| УСТРОЙСТВО для ПЕРЕГРУЗКИ ШТУЧНЫХ ГРУЗОВ | 1968 |
|
SU213307A1 |
| Автокран | 2018 |
|
RU2674214C1 |
| Телескопический подъемник | 1990 |
|
SU1754641A1 |
| Поточная линия формирования колесных пар подвижного состава | 1972 |
|
SU490701A1 |
| Автоматизированный склад | 1978 |
|
SU710874A1 |
| Устройство для автоматического управления исполнительным механизмом | 1974 |
|
SU535551A1 |
| УКЛАДОЧНЫЙ АГРЕГАТ | 1968 |
|
SU210738A1 |
Г
