1
Изобретение относится к роботостроению и может быть использовано при создапин различных мапипуляторов и приспособлений для временного закрепления деталей и предметов (например, во время обработки на станках или транснортнровки).
По осиовному авт. св. № 498156 известен исполнительный орган маиинулятора, содержащий захватные рычаги с приводным механизмом и герметичные тонкостенные губки из эластичной пленки. Губки наполнепы сыпучим материалом, закреплены на рабочей стороне рычагов и соединеиы с устройством для создания в них пониженного давления.
Недостатком известного исполнительного органа является невозможность схватывания нредметов с острыми кромками из-за быстрого износа и разрыва эластичной пленки.
С целью новышения надежности его работы, увеличения срока службы и получения возможности для закреплепия предметов с острыми кромками наружная поверхность губок предлагаемого пснолнительного органа манипулятора выполнена в виде протектора, имеющего рисунок, например, в виде рифлений.
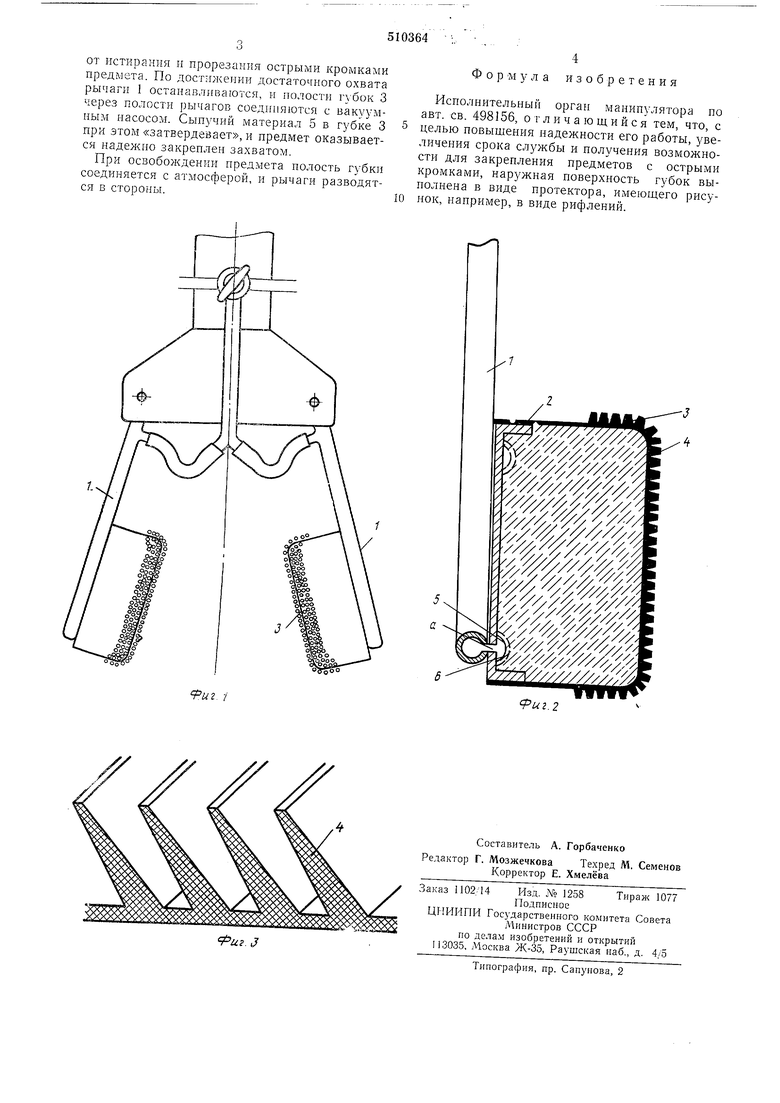
На фиг. 1 показан предлагаемый исполнительный орган манипулятора, общий впд; на фиг. 2 - поперечное сечение губки; на фиг. 3 - вариант выполнения протектора.
На жестком трубчатом рычаге 1 жестко закреплен фланец 2 с герметнчно закреплепной па нем губкой 3. Наружная новерхность губкн выполнена в виде протектора, имеющего рисунок, напрпмер, в виде рифлений. Выступы 4 могут быть выполнены как нз того же материала, что и протектор, так и из другого, более прочного пли твердого материала. Нространство, ограниченное фланцем 2 н стенкой губки 3, занолнено сыпучим материалом и соединено с внутренней полостью рычага 1 (и далее через нее с вакуумным насосом) отверстием а. Это отверстие (или отверстия) закрыто закрепленным на дне фланца 2 перевернутым перфорированным кольцевым же.юбом 5, па поверхность которого со стороны баллона установлена ненодвнжная сетка 6. способная задержать сыпучий матернал.
В состав нсполиительного органа входит два таких устройства, причем рычаги 1 могут сближаться и расходиться под действием приводного механизма механического, э.тектромсханического или гидродинамического .
Захват располагается таким образом, чтобы предмет находился между губками 3. Прн этом рычаги разведены, а полость губок сообщается с атмосферой. Рычаги 1 сближаются с помощью приводного механизма. Нри этом стенка губки касается нредмета лнщь верщинами выстунов 4. Такнм образом, благодаря рифлениям протектора губка предохраняется
от истирания н прорезаиия острыми кромками предмета. По достижении достаточиого охвата рычаги 1 останавливаются, и иолости губок 3 через полости рычагов соединяются с вакуумным иасосом. Сыиучий материал 5 в губке 3 при этом «затвердевает, и предмет оказывается наделано закреплен захватом.
При освобождеиии предмета полость губки соединяется с атмосферой, и рычаги разводятся в стороиы.
Формула изобретения
Исполнительный орган манипулятора по авт. св. 498156, отличающийся тем, что, с целью повышения надежности его работы, Звеличения срока сл)жбы и получения возможности для закрепления предметов с острыми кромками, наружная поверхность губок выполнена в виде протектора, имеющего рисунок, например, в виде рифлений.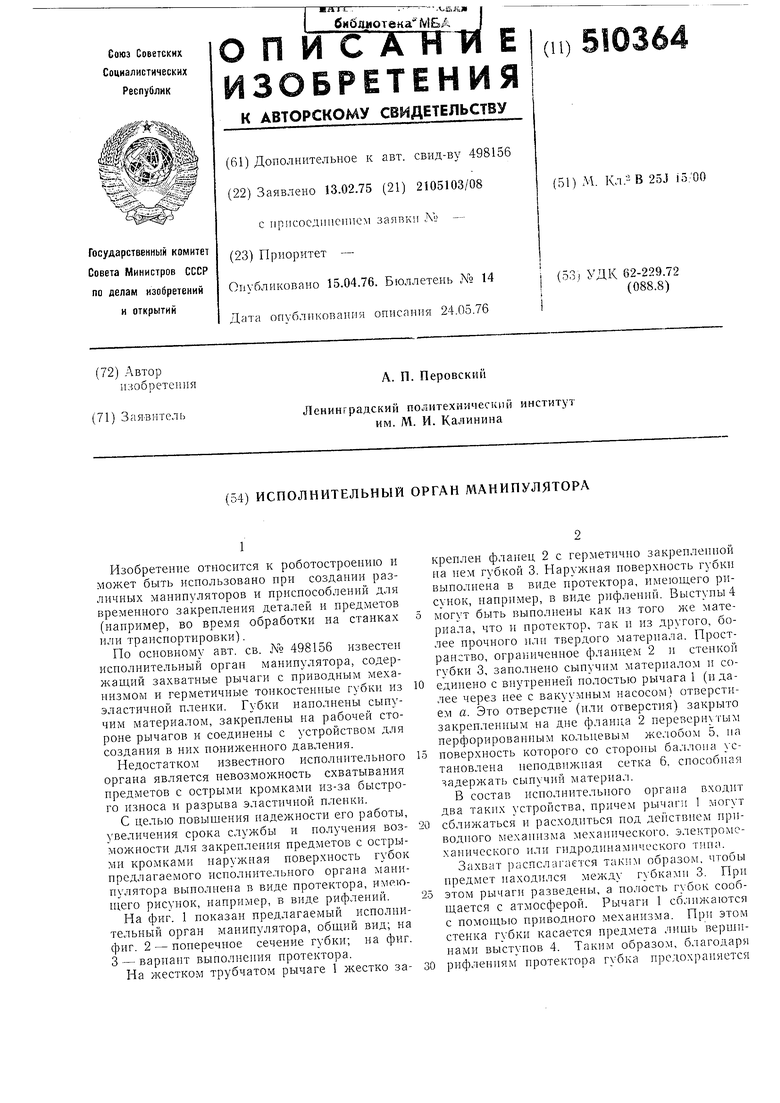
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1979 |
|
SU854709A2 |
| Исполнительный орган манипулятора | 1978 |
|
SU770789A2 |
| Исполнительный орган манипулятора | 1979 |
|
SU831611A2 |
| Исполнительный орлан манипулятора | 1975 |
|
SU510365A2 |
| Схват манипулятора | 1983 |
|
SU1098792A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Устройство для резки тонкостенных труб | 1989 |
|
SU1687381A2 |
| Схват манипулятора | 1988 |
|
SU1576310A1 |
| ВАКУУМНО-УПАКОВОЧНАЯ МАШИНА | 1995 |
|
RU2080273C1 |
| Устройство для демонтажа футеровки алюминиевых электролизеров | 1986 |
|
SU1371989A1 |
