Изобретение относится к манипуляторам для механизации и автоматизации технологических процессов, в частности к грузозахватным устройствам манипуляторов.
Известен схват, содержащий корпус, 1-убки, привод перемещения губок в направлении, перпендикулярном оси схвата. Для обеспечения возможности захвата деталей различных размеров в равномерно расположенных на торцовых поверхностях губок отверстиях, оси которых параллельны оси схвата, смонтированы с возможностью осевого перемещения подпружиненные стержни.
При подходе к предмету часть стержней упирается в него торцами и утапливается в тело губок, а стержни, не вощедщие в соприкосновение с предметом, прижимают его своими боковыми поверхностями 1.
Известный схват позволяет работать с изделиями различных форм, однако при небольшом усилии пружин стержней возникает опасность выскальзывания изделия, а при постановке мощных пружин возрастает необходимое усилие на приводе губок.
Кроме того, в процессе переноса тяжелые изделия могут раскачиваться на подпружиненных стержнях, что вызывает нежелательные динамические нагрузки на исполнительный орган манипулятора, а также снижает надежность работы.
Цель изобретения - повыщение надежности схвата.t
Цель достигается тем, что в схвате манипулятора, содержащего корпус, губки с подпружиненными стержнями и привод перемещения губок, каждая губка снабжена силовым приводом, а каждый стержень механизмом стопорения, выполненным в виде поворотного эксцентрика, кинематически связанного с порщнем силового привода.
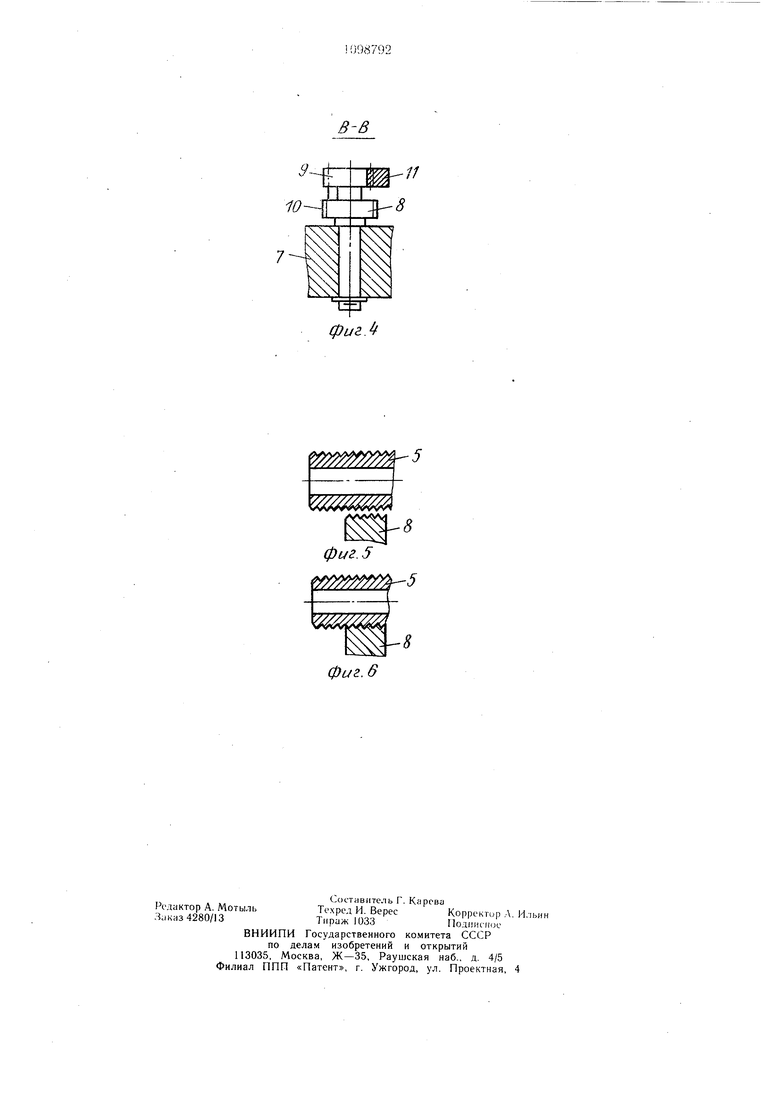
На фиг. 1 изображен схват манипулятора, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - сечение В-В на фиг. 2; на фиг. 5 и 6 - взаимодействие наружных поверхностей эксцентрика и стержня (расцепленное и сцепленное состояние).
Схват манипулятора содержит корпус 1, в котором расположен приврд (не показан), поворачивающий рычаги 2 вокруг осей 3. Губки 4 выполнены полыми, внутри их расположены все механизмы схвата. Рабочие стержни 5, подпружиненные пружинами 6, расположены в крыщке 7 (фиг. 3). В этой же крыщке выполнены отверстия, в которых находятся эксцентрики 8 и приводные щестерни 9, расположенные 5 на общей оси. На наружной поверхности 10 эксцентрика 8 и на наружной поверхности стержня 5 выполнены профили стандартной резьбы (возможны также выполнения на одной из упомянутых деталей канавок,
0 а на другой - выступов). Шестерня 9 при помощи рейки 11 связана с порщнями 12 силовых, размещенных в торцовых частях, губок 4. Крыщки 13 снабжены щтуцерами 14 и 15, с помощью которых рабочая среда (воздух) подается к порщням 12.
Схват манипулятора работает следующим образом.
Для работы необходимо предварительно развести губки 4 и подвести схват к изделию так, чтобы оно находилось между пра0 вой и левой (фиг. 1) группами стержней 5. После этого губки сближаются и изделие вступает в контакт со стержнями 5, которые утапливаются в тело губок 4 на ту или иную длину в зависимости от формы изделия. После окончания перемещения стерж5 ней 5 (теперь все они контактируют с изделием) подают воздух к верхнему порщню 12 через щтуцер 15 (фиг. 1 и 2). При этом порщень 12, сдвигаясь вниз, перемещает рейки 11, которые поворачивают щестерни 9 по часовой стрелке, а также рабочие поверхности 10 эксцентриков 8 (фиг. 2 и 4). Резьбовые поверхности 10 и аналогичные поверхности, выполненные на стержнях 5, сцепляются (фиг. 6), стопорят стержни. После этого схват с изделием может быть переведен на другую технологическую позицию.
Для высвобождения изделия необходимо подать воздух к нижнему порщню 12 (фиг. 2) через штуцер 14, при этом порщень и рейки 11 движутся вверх, щестерни 9 и эксцентрики 8 поворачиваются против часовой стрелки, а резьбовые поверхности эксцентриков 8 и стержней 5 расцепляются (фиг. 5). После этого стержни 5 уже могут перемещаться относительно губок 4. Теперь можно развести губки 4 и освободить изделие.
Предлагаемый схват манипулятора в связи с наличием механизма стопорения стержня обладает повыщенной надежностью захвата изделий разнообразных форм при минимальной величине давления на их поверхности.
73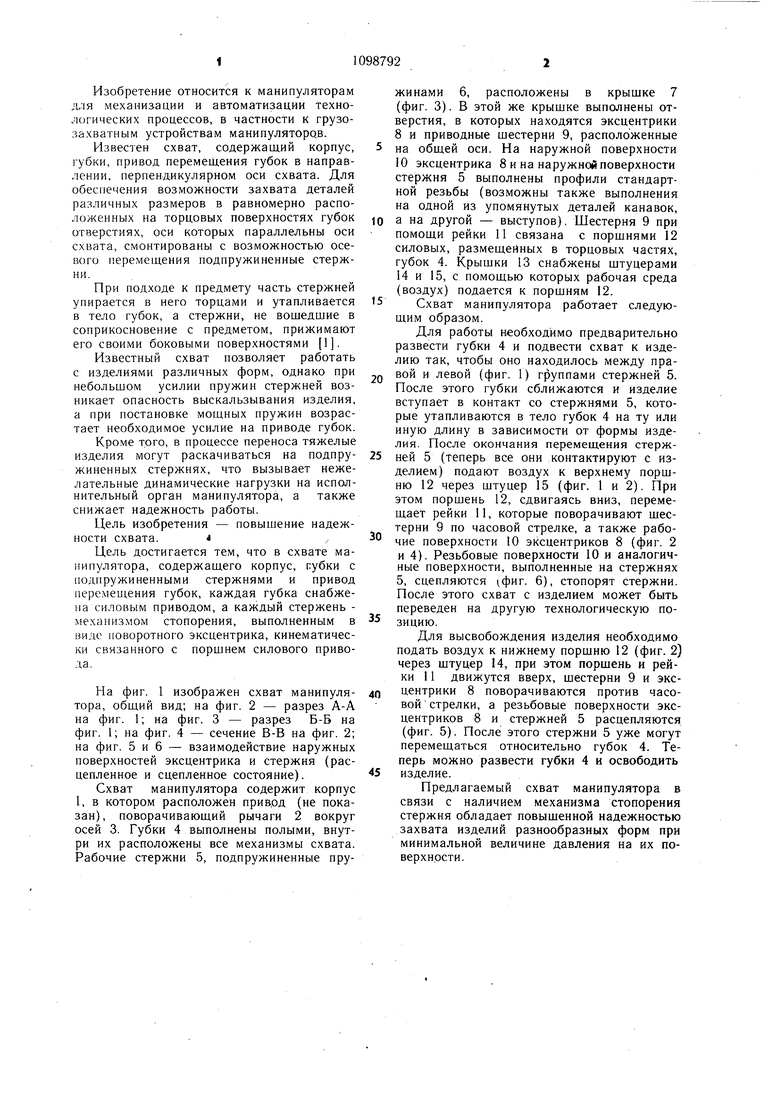
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1985 |
|
SU1268403A1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Манипулятор | 1974 |
|
SU547336A1 |
| Манипулятор | 1986 |
|
SU1313688A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Хобот манипулятора | 1979 |
|
SU829307A1 |
| Манипулятор | 1975 |
|
SU524686A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Схват манипулятора | 1983 |
|
SU1071421A1 |

.Т )lT()l.. о)де|)к;л1ип к ), г no-jipx жшкчшыviii сте:)жпяли и привод П. чхниюния губок, от.111чаюи( тем. чю. t iie.;Mo повышения lia.ie/KiiocTii. каждая губка (.паожона силовым 1|)11иодом. а каж..ыГ| сте):Ке11ь - ме.хаип; м(П1 стопорения. гилюлпоииым в иде поворотного эксисп г|)ика. кинематически связаи1и)1О с HopiHHevi сил()вог() привода.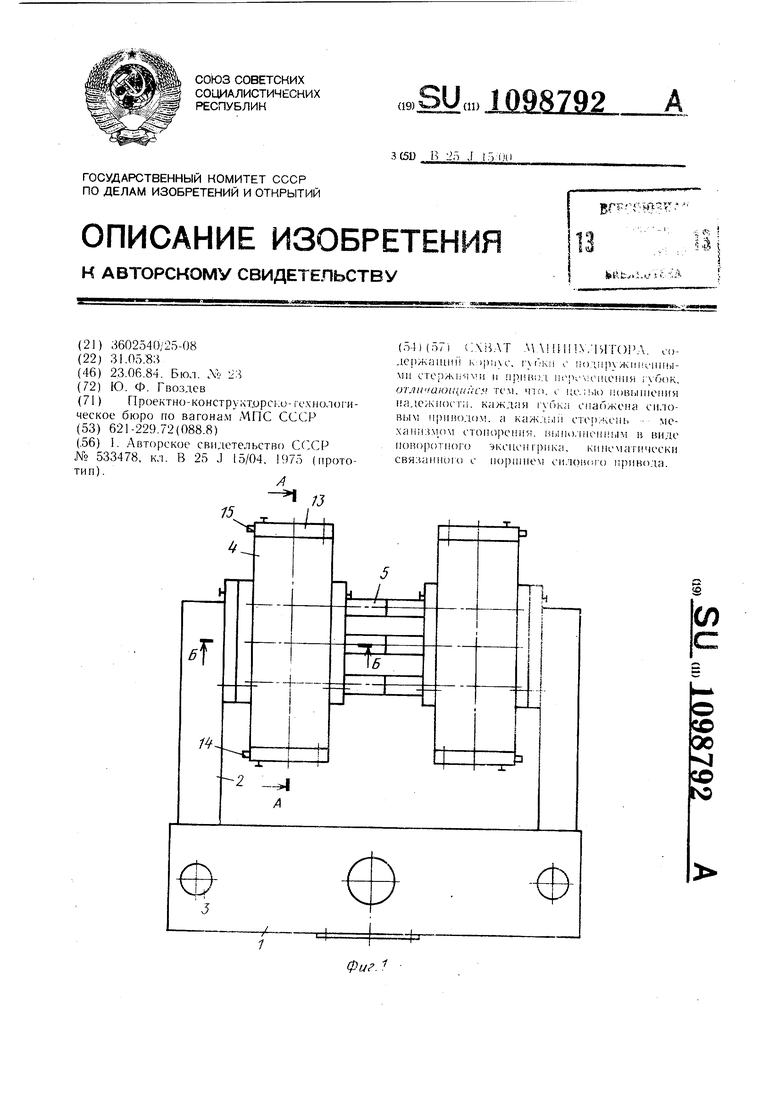
ft
:V////A /7 ///7//////
///////////////////////////////////Л.
фиг.З
Б-6
9фиг.
