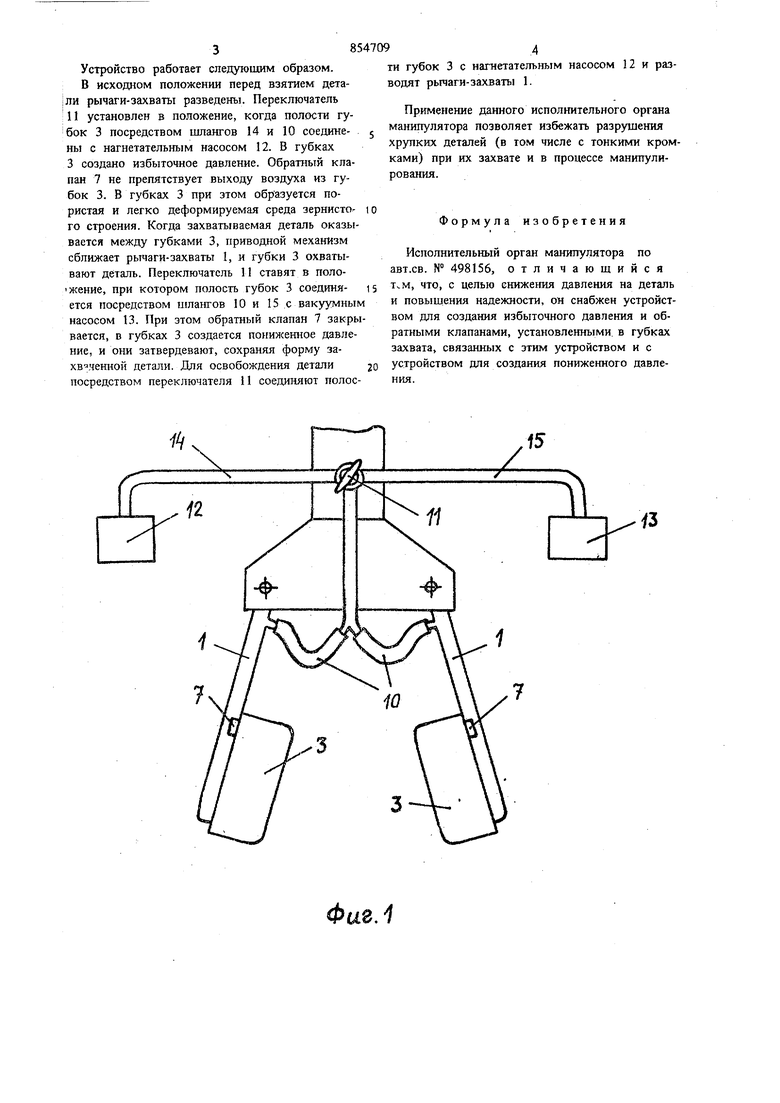
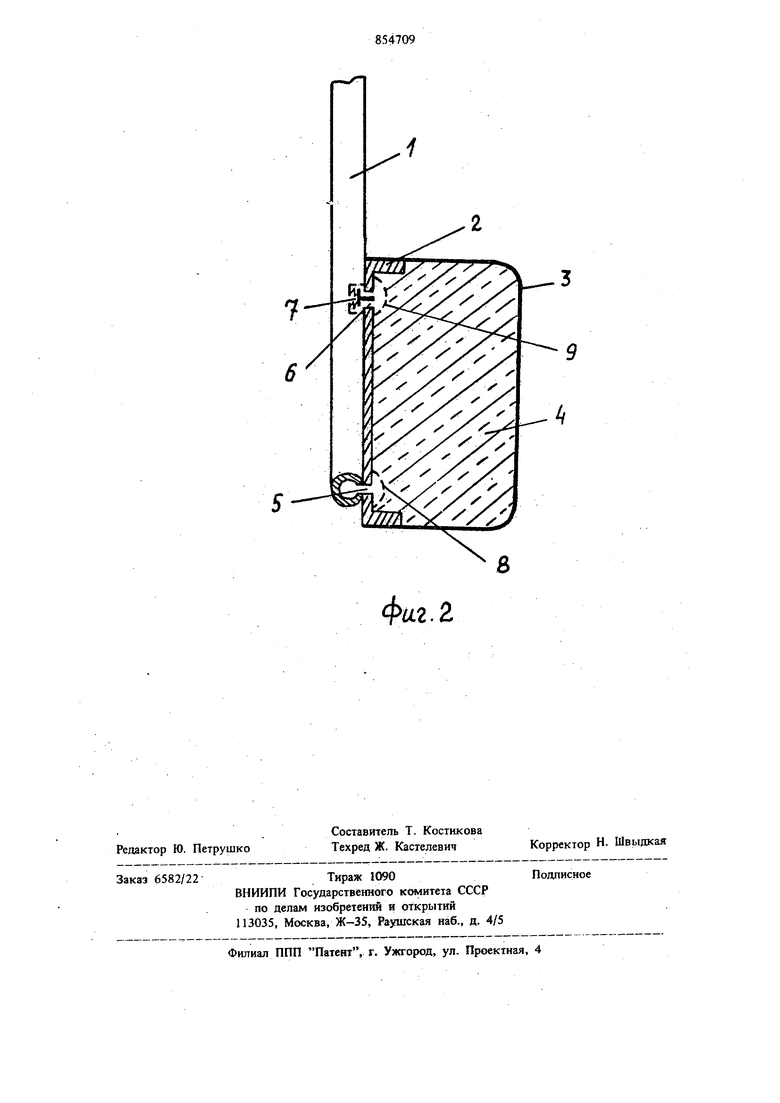
Изобретение относится к изготовлению манИ пуляторов, промышленных роботов и может быть использовано для временного закрепления деталей различной формы при их транспортировании. По основному авт.св. № 498156 известен исполнительный орган манипулятора, содержаш захваты с губками, выполненными из эластичного тонкостенного материала, заполненными сыпучим гранулированным веществом н соедине шыми с устройством для создания в нем пониженного давления. Недостатком известного манипулятора яйляется значительная жесткость губок в начальный момент захвата детали, что приводит к повреж дению хрупких деталей с острыми кромками. Цель изобретения - снижение давления на деталь и повышение надежности исполнительного органа. Цель достигается тем, что исполнительный орган манитгупятора снабжен устройством для создания избыточного давления и обрат}п 1ми клапанами, установленными в губках захвата, связанных с этим устройством и с устройством для создания по1шженного давления. На фиг. I изображе исполнительный орган манипулятора, общго1 вид; на фиг. 2 - губка, поперечный разрез. Исполнительный орган манипулятора содержит рычаги-захвать 1 коробчатого сечения, средииетгые с приводным механизмом. На захпатах i жестко закреплены фланцы 2 с герметично укрепленными на них губками 3. Пространство, ограниченное стенкой губки и фланцем 2, заполнено гранулированным сыпучим материалом 4 (например полимером) и соединено с внутренней полостью рычага-захвата 1 отверстием 5 на фланце 2. Отверстие 6 флапад 2 закрыто обратным клапаном 7. Отверстия 5 и 6 закрыты сетками 8 и 9, задерживающими гранулированный сыпучий материал 4. Полости рычагов-захватов 1 соединены посредством вакуумных шлангов 10 с переключателем 11 (например трехходовым краном). Переключатель 11 подключает полости губок 3 к нагнетательному насосу .12 и вакуумному насосу 13 шлангами 14 и 15 соответственно. Устройство работает следующим образом. В исходном положении перед взятием дета|ли рычаги-захваты разведены. Переключатель 11 установлен в положение, когда полости губок 3 посредством шлангов 14 и 10 соединены с нагнетательным насосом 12. В губках 3 создано избыточное давление. Обратный клапан 7 не препятствует выходу воздуха из губок 3. В губках 3 при зтом образуется пористая и легко деформируемая среда зернистого строения. Когда захватываемая деталь оказывается между губками 3, приводной механизм сближает рычаги-захваты 1, и губки 3 охватывают деталь. Переключатель 11 ставят в положение, при котором полость губок 3 соединяется посредством шлангов 10 и 15 с вакуумным насосом 13. При этом обратный клапан 7 закры вается, в губках 3 создается пониженное давление, и они затвердевают, сохраняя форму захв яенной детали. Для освобождения детали посредством переключателя 11 соединяют полос 8 4 ти губок 3 с нагнетательным насосом 12 и разводят рычаги-захваты 1. Применение данного исполнительного органа манипулятора позволяет избежать разрушения хрупких деталей (в том числе с тонкими кромками) при их захвате и в процессе манипулирова1гая. Формула изобретения Исполнительный орган манипулятора по авт.св. № 498156, отличающийся ТчМ, что, с целью снижения давления на деталь и повышения надежности, он снабжен устройством для создания избыточного давления и обратными клапанами, установленными, в губках захвата, связанных с этим устройством и с устройством для создания пониженного давления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1979 |
|
SU831611A2 |
| Исполнительный орган манипулятора | 1975 |
|
SU510364A2 |
| Исполнительный орган манипулятора | 1978 |
|
SU770789A2 |
| Исполнительный орлан манипулятора | 1975 |
|
SU510365A2 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| Схват для хрупких деталей | 1984 |
|
SU1284827A1 |
| Разбрасыватель жидких удобрений | 1974 |
|
SU533352A1 |
| Вакуумный захват манипулятора | 1982 |
|
SU1085808A1 |
| Всасывающе-нагнетательная установка для пневмотранспортирования сыпучих материалов | 1982 |
|
SU1055714A1 |
Фав.1
фаг. 2
