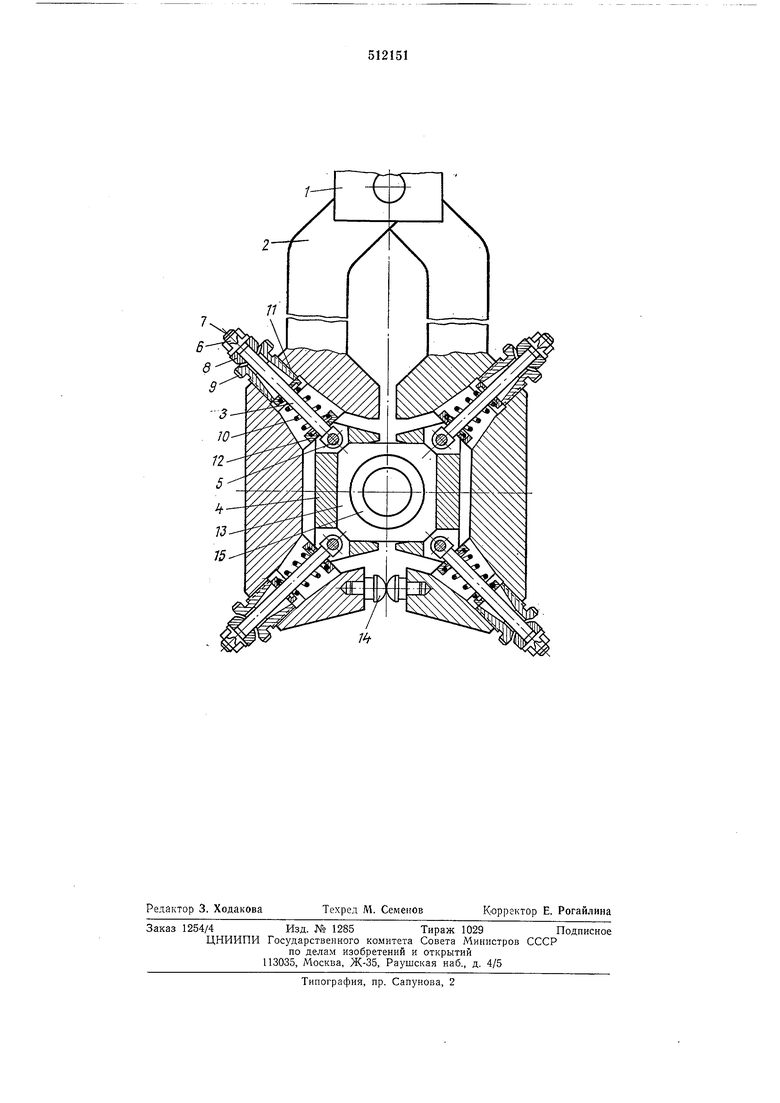
Изобретение относится к области грузозахватных устройств, а именно для захвата и установки изделир в труднодоступные места, например, герметичные камеры. Известно устройство, содержащее подпружиненные губки, захватывающие изделия. Цель изобретения - центрирование изделия при несоосной задаче. Это достигается тем, что в предлагаемом устройстве каждая губка смонтирована по меньшей мере на двух шарнирах и подпружиненных тягах, а каждая тяга пропущена через несущий ее рычаг и имеет сферическую опору. На чертеже представлено предлагаемое устройство, общий вид. Манипулятор состоит из корпуса 1, на котором смонтированы приводные несущие рычаги 2. Через рычаги 2 пропущены тяги 3, шарнирно связанные с губками 4 через пальцы 5. На тяги навернуты гайки 6, застопоренные шайбами 7, под которыми установлены сферические опоры 8. Опоры 8 при нерабочем положении губок опираются на сферические поверхности втулок 9. Между торцами втулок 9 и гранями губок установлены пружи1гы 10, непосредственно опирающиеся па шайбы 11 и 12. Усилие сжатия пружин обеспечивает надежный захват изделия 13 при сближении рычагов 2 до упоров 14, при этом на изделии 13 выполняется заходный KOHVC 15. В исходном -положении рычаги 2 раскрыты, и губки под действием 10 не охватывают изделие 13, опоры 8 опираются на поверхность втулок 9. После включения привода управления захватом рычаги 2 сводятся, губки соприкасаются с изделием 13, а тяги 3 начинают разворачиваться вокруг оси пальцев 5 и опор 8, пружины 10 сжимаются и между опорами 8 и втулками 9 образуется зазор. Перемещение рычагов 2 соверщается до соприкосновения упоров 14. Если при подаче изделия на шпиндель станка оси изделия шпинделя не совпадают, то заходный конус шпинделя упирается в заходный конус 15 изделия, смещает и разворачивает в пределах величины зазоров губок 4 с тягами 3 и за счет срабатывания пружин 10 обеспечивается самоустановка изделия на рабочее место. Формула изобретения Захват манипулятора, преимущественно для автоматического центрирования изделий, содержащий корпус, подпружиненные губки, рычаги с приводом, отличающийся тем, что, с целью центрирования изделия при несоосной задаче, каи-сдая губка смонтирована по меньшей мере на двух шарнирах и подпружпиенных тягах, снабженных сферическими опорами, при этом каждая тяга пропущена через несущий ее рычаг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для микросварки | 1984 |
|
SU1155405A1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА И УСТАНОВКИ ДЕТАЛЕЙ | 1991 |
|
RU2010692C1 |
| Манипулятор | 1977 |
|
SU694274A1 |
| Захватная головка манипулятора | 1976 |
|
SU613891A1 |
| Автооператор | 1979 |
|
SU772809A1 |
| Устройство для загрузки и разгрузки токарного многошпиндельного станка | 1986 |
|
SU1340976A1 |
| Приспособление для центрирования чураков при закреплении их на центрах лущильного станка | 1944 |
|
SU65034A1 |
| Устройство для сборки конденсаторов с однонаправленными выводами | 1987 |
|
SU1585840A1 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |