чагах 4 посредством винтов 16, опирающихся на сферические шайбы 17 и 18 и пружины 19. Затяжка винтов 16 производится таким образом, что губки 6 в процессе зажима имеют возможность проворачиваться, обеспечивая иараллельпость расположения рабочих поверхностей и полное прилегание их к удерживаемой заготовке.
Манипулятор работает следующим образом.
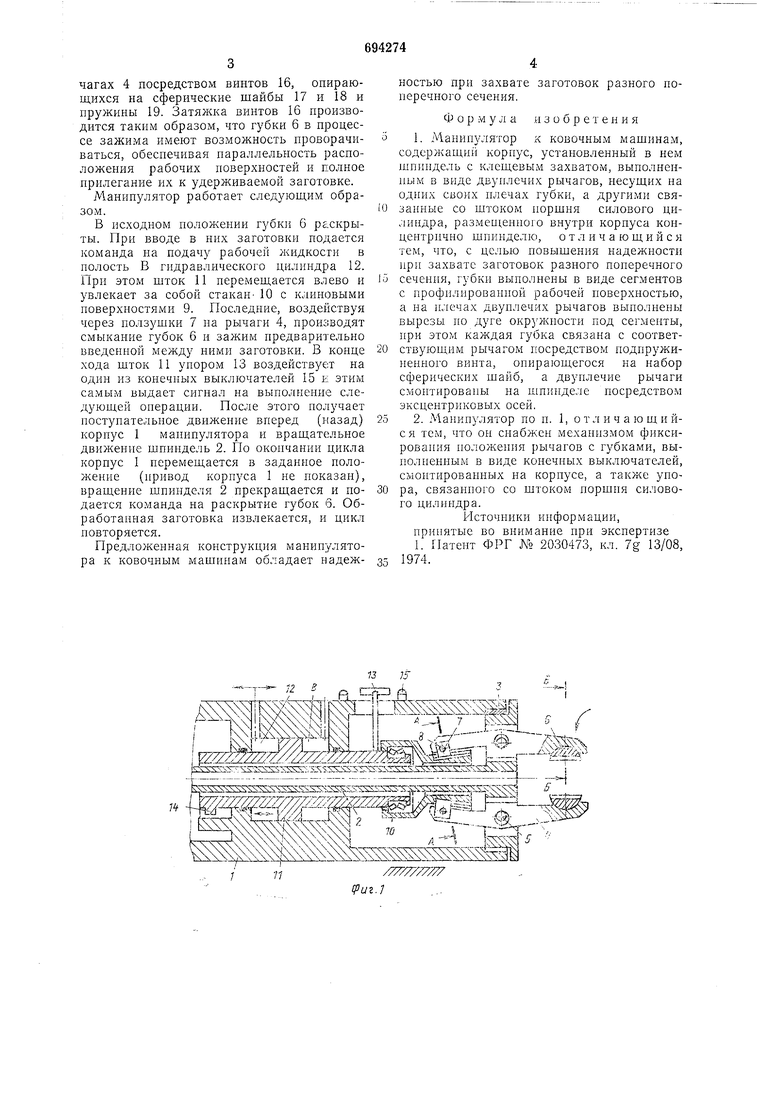
В исходном иоложении губки 6 раскрыты. При вводе в них заготовки подается команда на подачу рабочей жидкости в полость В гидравлического пилиидра 12. При этом шток 11 перемещается влево и увлекает за собой стакан-10 с клиновыми иоверхиостями 9. Последние, воздействуя через ползушкп 7 на рычаги 4, производят смыкание губок 6 и зажим предварительно введенной между ними заготовки. В конце хода шток И уиором 13 воздействует на один из конечных выключателей 15 к. этим самым выдает сигнал на выполнение следующей оиерапии. После этого получает поступательиое движение вперед (назад) корпус 1 мапинулятора н вращательное движение шпнндель 2. По окончании цикла корпус 1 перемещается в заданное положение (привод корпуса 1 не ноказан), вращение шпинделя 2 прекращается и подается команда на раскрытие губок 6. Обработанная заготовка извлекается, и цикл повторяется.
Предложенная конструкция манинулятора к ковочным машнпам обладает надежностью при захвате заготовок разного поперечного сечения.
Фор .VI у л а и 3 о б р е т е н и я
1.Манипулятор к ковочным машинам, содержащи корпус, установленный в нем шпиидель с клещевым захватом, выполненным в виде двуилечих рычагов, несущих на одних своих илечах губки, а другими связанные со штоком норшня силового цилиндра, pasMentennoro внутри корпуса концеитрично шпинделю, отличаюшийся тем, что, с целью повышения надежности ири захвате заготовок разного понеречного сечения, губки выполнены в виде сегментов с профилированной рабочей новерхностью, а на и;1ечах двунлечих рычагов вынолнены вырезы по дуге окружности под сегменты, при этом каждая губка связана е соответствующим рычагом посредством подпружиненного винта, опирающегося на набор сферических шайб, а двунлечие рычаги смоитировапы на шпинделе носредством эксцентриковых осей.
2.Манипулятор по и. 1, о т л и ч а ю щ и йся тем, что он сиабжен механизмом фиксироваиия положения рычагов с губками, выполненным в виде конечных выключателей, смонтированных на корпусе, а также упора, связапного со штоком поршня силового цилиидра.
Источпики ииформации, принятые во внимание ири экспертизе L Патеит ФРГ № 2030473, кл. 7g 13/08, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1018774A1 |
| Клещевая головка ковочного манипулятора | 1982 |
|
SU1055583A1 |
| Хобот манипулятора | 1979 |
|
SU829307A1 |
| Устройство для подачи листового материала в зону обработки | 1987 |
|
SU1442301A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Клещевая головка хобота ковочного манипулятора | 1983 |
|
SU1133013A1 |
| Захват манипулятора | 1974 |
|
SU512151A1 |
| ЗАЖИМНАЯ ГОЛОВКА-МАНИПУЛЯТОР | 2005 |
|
RU2295436C2 |
| Установка для прессования изделий из металлических порошков | 1975 |
|
SU610609A1 |
| Схват | 1983 |
|
SU1138313A1 |

,.
ii 11 - . .
.ф 1
- ж. ---%
--.- чгЗх ,.
/7777/77777
А
