1
Изобретение относится к области обработки информации для управления транспортными средствами и предназначено для использования на всех предприятиях, включающих в себя горнотранспортный комплекс.
Известно устройство для обработки данных комплекса «карьер-обогатительная фабрика, содержащее блоки ввода данных о составе руды, блоки умножения, суммирования и деления, блок задания, блок сравнения, ключи, блок индикации и предназначено для вычисления ожидаемого усредненного химсостава руды, добытой в различных забоях карьера и доставляемой на обогатительную фабрику, и сравнения получаемого результата с фактическим. Недостатком этого устройства является наличие большого количества блоков оперативной памяти, соответствующего числу объектов управления добычных экскаваторов, автосамосвалов 1.
Аналогичным недостатком обладает система, определяющая местонахождение транспортного средства и задающая направление его движения, содержащая вычислитель координат, управляющее соединительное устройство, синхронизирующее устройство, блок рулевого привода, визуальную индикацию, компенсатор ошибок, систему коррекции ощибок и предназначенная для определения местонахождения транспортных средств относительно
координатных осей X и У и задания направления их движения 2.
Из известных устройств наиболее близким по технической сущности к изобретению является устройство для программного управления грузотранспортными механизмами, содержащее блок входных регистров, подключенный к вычислительному блоку, блоки записи и ввода программы, соединенные с блоком управлення, и блок сравнения, подключенный к блоку управления и через регистр считывания - к блоку ввода программы 3.
Это устройство не обладает необходимой надежностью, так как количество прогонов перфоленты через фотосчитывающнй блок при ее обработке равно количеству транспортных единиц, работавших в смену. Многократное же использование носнтеля информации (перфоленты) приводит к появлению сбоев. Низкая надежность устройства обусловлена также тем, что оно обладает аппаратурной избыточностью, так как информация о работе экскаваторов, записанная на перфоленте, вначале считывается в блоки оперативной памяти,
количество которых соответствует числу экскаваторов, а уже из них выводится на печать, в то время как эта информация может быть получена и выведена на печать непосредственно с перфоленты аналогично с информацией
о работе автосамосвалов.
Кроме того, уто j-стройство не позволяет использовать накапливаемую в течение смены информацию о- -ра-боте автосамосвалов и экскаваторов для---опер адчшного контроля и управленяя, так как эта информация регистрируется чш перфоленте в виде исходных , иодлежащнх обработке, а обработка иерфолеитьшрот-йводится только в конце смены.
Целью изобретения является новышение надежности уетройетва.
Поставленная цель достигается тем, что в него введены последовательно соединенные узел блокировки, подключенный к блоку входных регистров, вычислительному блоку и блоку управления, дополнительный регистр, соединенный с одним из входов блока сравнения, и блок переключения, входы которого подключены к выходам блоков ввода программы и управления, а выход - ко р.ходу блока записи программы.
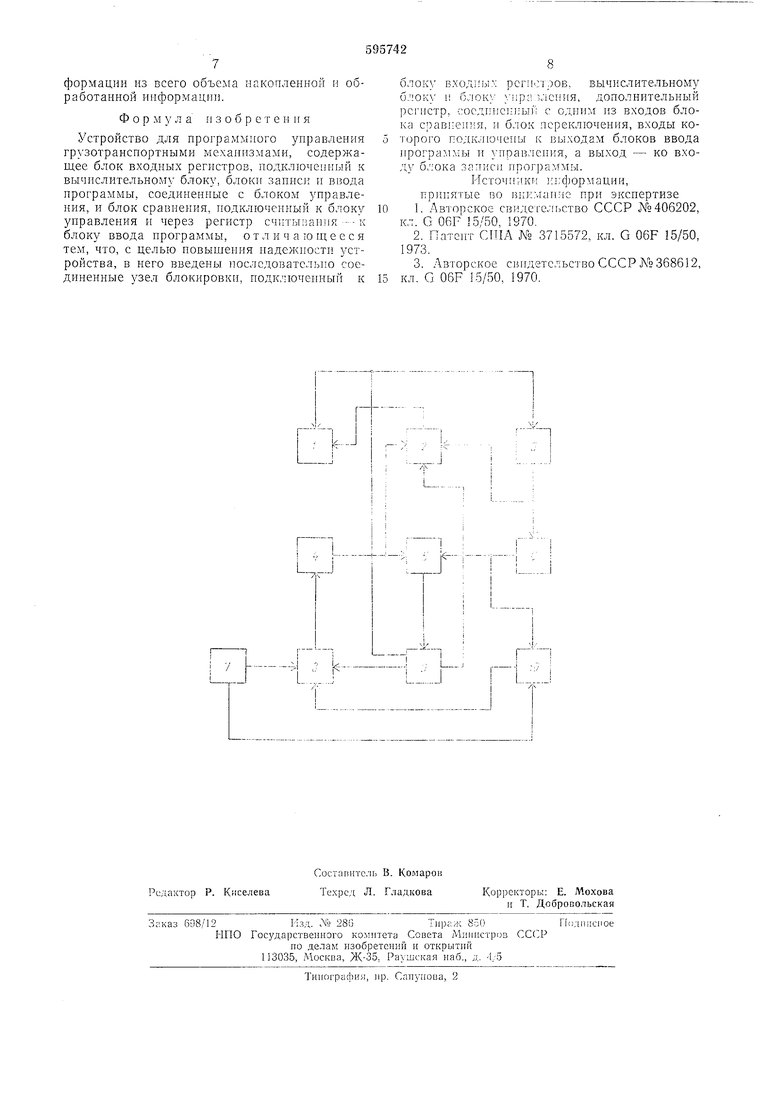
lia чертеже приведена блок-схема устройства.
Устройство содержит блок записи ирограммы 1, соединенный через блок переключения 2 с блоком ввода программы 3, доиолпительный регистр 4, подключенный к блоку переключения 2 н блоку сравнения 5, регистр считывания 6, соединенный е блоком ввода программы 3 и блоком сравнения 5, блок входных регистров 7, подключенный через узел блокировки о к донолнительиому регистру 4 и блоку управления 9, соединеипому с блоком записи программы 1, блоком переключения 2, блоком ввода фограммы 3 и блоком cpaijнения 5, и вычислгтельный блок 10, подключенный к регистру считывания 6, блоку входных регистров 7 н узлу блокировки 8.
Устройство работает следующим образом.
В начале работы дпепетчер подготавливает к работе блоки записи 1 и ввода 3 программы, например, при использовании перфоратора и фотосчнтывающего устройства, диенетчер заряжает перфоленту с выхода перфоратора в фотоечнтываюидее уетройство.
В дальнейшем устройство работает автоматически, и вся последующая и обрабатываемая им информация находится на участке носителя информацнн и между блоком заииен программы 1 н блоком ввода программы 3 в виде массива мащин и массива экскаваторов, разделенных между еобой служебным признаком «конец массива машнн. Массив машин включает в себя массивы стенограмм работающих автоеамосвалов, разделенные между еобой служебным признаком «конец массива стенограммы и итоговыми данными по каждой машине. Массив экскаваторов содержит итоговые даииые по каждому работающему экскаватору с указанием его номера и заканчивается служебным признаком «конец маеенва экскаваторов.
Принцип работы устройства состоит в чередовании двух режимов работы: режима накоплення информации н режима считывания с перезаписью. Ирн работе в режиме накопле -:1 я информации блок ввода программы 3 отключен, и блок заниси программы 1 фиксирует на носителе информации ностунившую информацию. В режнме считывания с перезапиСЬЮ па носителе информации иерезаиисывается информация, накопленная ранее и считываемая блоком ввода нрограммы 3.
Информация о номере автосамосвала, весе доставляемой руды, нункте ногрузки и разгрузки записывается в блок входных регистров 7. Причем информация о номере автосамосвала, иесе доставляемой руды и нункте ногрузки (номер экскаватора) перенисывается, при отсутствии занроса с блока управления 9
на выдачу справочной информацнн, через узел блокировки 8 в дополнительный регистр 4, в котором формируется информационное елово, а информация о пунктах погрузки и разгрузки, а также весе доставлеппой руды поступает в
вычис.Иггельиый блок 10. В вычислительном блоке 10 хранится информация о протяженности всех возможных маршрутов от пунктов иогрузки до иунктов разгрузки. По кодам иупкта иогрузки и разгрузки определяется
протяжепноеть маршрута данного рейса в километрах, а в результате умножения числового значения веса доставлеппой руды, в тонпах на нротяженность маршрута в километрах ои-ределяется выполпепная в данном рейсе работа в тонно-километрах. Кроме того, в вычислительный блок 10 из регистра считывания О поступает считанная блоком ввода nporpaiMмы 3 информация о количестве ранее выиолнеппых данных автосамосвалом рейсов, суммарпом весе доставленной руды п выполненной при этом работе. По этой информации в вычнслительном блоке 10 определяется норядковый номер данного рейса (к количеетву ранее выполненных рейсов добавляетея еднниЦа), а также вычисляется суммарный вес доставленной руды в тоннах и выполненная нри этом работа в тонно-километрах в учетом данного рейса (текущие зиачения суммируются е накопленными ранее). Результаты вычнслеНИИ из вычислительного блока 10 через узел блокировки 8 переписываются в дополнительный регнстр 4, дополняя формат информационного елова, включающего в себя, кроме иеречисленной ииформации, служебные иризнаки: «конец массива стенограмм, «конец массивов машин, «коней; массива экскаваторов.
Перечисленные служебные нризнаки постоянно хранятся в донолнительном регистре 4.
Таким образом, информациоипое слово, содержащее полную информацию о В ошолненном автосамосвалом рейсе, имеет следующую структуру: помер автосамосвала, порядковый помер рейса, вес доставленной руды в тоннах,
выиолненная при этом работа в тонно-километрах, служебный признак «конец масснва стенограмм, суммарный вес доставленной руды с учетом данного рейса в тоннах, выполненная нри этом работа в топио-километрах,
елул ебный прнзпак «копсц массивов машин.
номер погрузчика (экскаватора) сс погруженной им руды в тоннах, сл}жебиый признак «конец массива экскаваторов. При поступлении в блок входных регнстров 7 устройства информации о перво:,г выполненном рейсе в донолннтсльпом регистре 4 формируется первое информационное слово. При зтом блок сравнения 5, сравнивая его с нулевыми значениями регистра считывания 6, вырабатывает сигнал «начало работы, по которому блок управления 9 включает блок записи программы 1 н подает управляющий сигнал блоку переключенпя 2. При этом устройство переключается в режим иакоилення информации, и иервое ниформацнопное слово регистрируется на носителе информации блоком записи программы 1.
В дальнейшем устройство работает следующим образом.
При иостунленни очередного сообщенriH о вынолпенном рейсе блок унравления 9 включает блок заниси программы 1. блок ввода программы 3 и посредством блока переключеиия 2 переводит устройство в роким считывания с иерезаинсью. В этом реИхЬгле каждьп считанный символ регистрируется иа иоентеле информации блоком заииси -|)0:-раммы 1, записывается в соответствующий разряд регистра считывания 6 и сравнивается блоком сравиеиия 5 с соответствующим разрядом доиолнительного регистра 4. Формат и содержание накаиливаемой в регистре считывания 6 ииформации соответствует формату и содержанию ннформационного слова дополнительного регнетра 4. После дополнения региетра считывания 6 он очищается для приема следующего информационного слова. При совпадении содержимого разрядов, соответствующих номеру автосамосвала, что свидетельствует о нахождении нужного массива, блок управления 9 нереходит в режим поиска служебного иризнака «конец массива стенограммы. После нахождения указанного пр1 знака блок управления 9 отключает блок ввода программы 3 и переводит устройство в режим накопления информации, ири котором к запнеаниой ранее стенограмме работы данной машины нрнсоедиияется новая иифор.мация с наконлением итогов, считываемая с дополнительного регистра 4. Еслн при этом в регистре считывания 6 служебный призиак «конец масснвовман:1ии отсутствует, т. е. был считан :acС1 в ие о последней работающей машнне, то блок унравления 9 переводит устройство в режим считывания с перезаписью до нахождения указанного нризнака. Затем блок управления 9 нереходит в режим поиска соответствующего номера экекаватора в массиве экскаваторов, при котором блок сравнения 5 сравиивает разряды дополительного регистра 4 с информацией о номере экскаватора с соответствующими разрядами регистра считывання 6. Одновременно продолжается перезапись считываемой информации до совпадения контролируемых разрядов дополнительного регистра 4 и регистра считывания 6, что соответствует нахождению требуемого номера экскаратора. После этого к предыдущему значенню веса погруженной руды добавляется текущее, устройство переключается в режим наконлеиия J:нфop iaции, и на иоснтель ннформаци ланисывается повое значение вееа руды, погру;кеп; ОЙ данным экскаватором. Затем устройство вновь переходнт в режим считывання с перезаписью до нахождения сл жебного прнзнака «конец массива экскаваторов, после чего блок унравлепия 9 отключает блок запиС1 программы 1 и блок ввода программы 3 до поступления очередного еообщення о вынолиенном рейсе. Для запроса на индикацию
пли печать пптересующей информации (всей пакопленной или какой-либо ее части) в блоке управления 9 задаются признаки интересуюнхей информации (номер мащины, номер экскаватора, итоговые данные о работе каждого
контролируемого объекта или всех вместе и т. д.), которые через узел блокировки 8 записываются в дополнительный регистр 4, одновре.ме1П;0 блокгруя иа время запроса .leinie ииформацни из блока входных регистров 7 и вычисл 1тельного блока 10. По сигналу запроса блок управления 9 включает блок ввода программы 3 и блок записи программы 1. Считываемая ипформация региетрируется иа пос1ггеле информации, записывается в регистр
считывания 6 н сравиивается блоком сравнения 5 с заданным нризнаком дополнительного регистра 4. При наличии на выходе блока сравненгтя 5 сигнала совнадення, блок управления 9 отключает блок ввода программы 3,
блок заииси нрограммы 1 и заирощенная информация нерепнеывается из регистра считывания 6 для вывода на ннднкацию и печать. После удовлетворения занроеа блок управлеН я 9 включает блок ввода нрограммы 3 н
блок записи программы 1. При этом продолжается перезаппсь оставшейся информации до иахожлення елужебного нрнзнака «коиеи массивов экскаваторов. Если за время удовлетзО;)ения занроеа в уетройстзо поступила но15ая :;:формапл;я о конт1юлнруе ых обп сктах, то она заполииается блоком входных региетроз 7 ;: после до:злетворе11ия запроса обра6aiч шается устройством.
Таким образом, иовьинение надежности работы в иредложенном уетройстве достнгается введением в него последовательно соеднненных узла блокировки 8, дополиительиого регистра 4 н блока нереключеиня 2, соединеииых е другими блоками устройства согласно
форлиле нзобретения, что обеснечивает нолученне итоговых результатов за один прогон носителя ннформацнн и иеключенне аппаратур поп нзбыточиости за счет считываиия инфор-лации об экскаваторах непоередственно с
информации. Кроме того, устройетво нозколяет использовать обрабатываемую информацию для оперативного уиравления работой аБтоса:.10свалов и экскаваторов, так как в любо момент времени обеснечивает вывод на
иидикацию и печать любой необходимой ин7
формации из всего объема накопленной и обработанной информации.
Форм у л а и 3 о б р е т е н н я
Устройетво для программного унравления грузотранепортными механизмами, содержащее блок входных регистров, подключенный к вычислительному блоку, блокп запнсн и ввода программы, соединенные с блоком управления, и блок еравнення, нодключенный к блоку управления н через регистр считыгии-шя - к блоку ввода программы, отличающееся тем, что, с целью повыщепия иадежности устройства, в него введены последовательно соединенные узел блокировки, подключенный к
8
олоку входны:: регистров, вычислительному блоку U блоку yiip, 5лсиия, дополнительный peiHCTp, соедпиепныи с одним из входов блока с;)ав ;еиия, п блок переключения, входы которого подключены к выходам блоков ввода программы п управлспия, а выход - ко входу блока записи прог)аммы.
Источники 1: :формации, прп1:ятые во гзпимаиие при экспертизе
1. Авторское свидетельство СССР №406202, кл. G 06F 15/50, 1970.
2.Патепт США 3715572, кл. G 06F 15/50. 1973.
3.Авторское свидетельство СССР Х 368612, кл. G 06F 15/50, 1970.

| название | год | авторы | номер документа |
|---|---|---|---|
| СПЕЦИАЛИЗИРОВАННОЕ ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГРУЗОТРАНСПОРТНЫМИ РАБОТАМИ | 1973 |
|
SU368612A1 |
| Устройство для адресования и контроля движения автосамосвалов | 1976 |
|
SU732895A1 |
| Многоканальное устройство для управления движением транспортного средства | 1989 |
|
SU1702395A1 |
| Устройство для контроля и учета работы карьерного автотранспорта | 1975 |
|
SU516075A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОГРУЗОЧНО-ТРАНСПОРТНЫМИ СРЕДСТВАМИ НА КАРЬЕРАХ ПРИ СЕЛЕКТИВНОЙ ВЫЕМКЕ РУД И СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ КАЧЕСТВОМ РУДОПОТОКА НА ОСНОВЕ ЭКСКАВАТОРНО-АВТОМОБИЛЬНОГО КОМПЛЕКСА | 1996 |
|
RU2100844C1 |
| Устройство для автоматического адресования и контроля движения автосамосвалов | 1972 |
|
SU440315A1 |
| Система для управления и контроля работы погрузочно-транспортных средств | 1975 |
|
SU516074A1 |
| Устройство для управления движе-НиЕМ АВТОТРАНСпОРТА | 1979 |
|
SU822229A1 |
| ЦИФРОВАЯ МАШИНА ДЛЯ ПОИСКА ИНФОРМАЦИИ | 1966 |
|
SU214201A1 |
| Устройство для адресования и контроля движения автосамосвалов | 1974 |
|
SU470457A1 |
-
f
