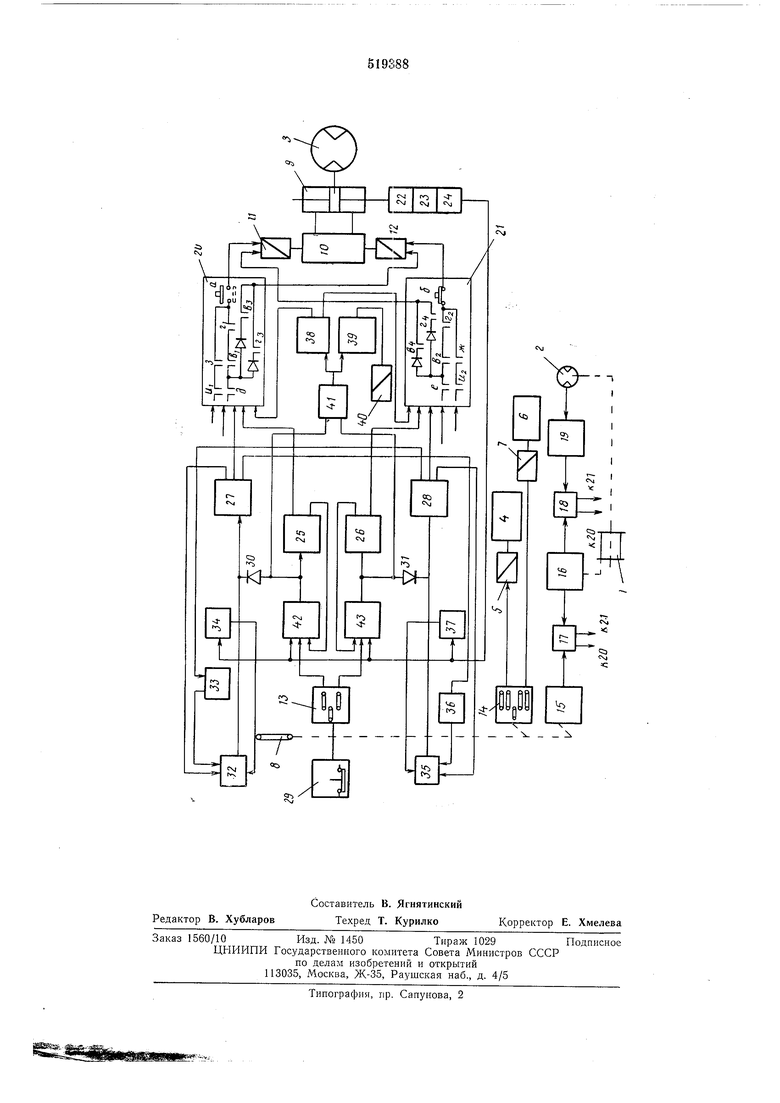
Регулирование производительности насоса 3 осуществляется с помощью люльки, перемещаемой управляющим гидродилиндром 9, жидкость -в который подается электрогидрозолотником 10 с электромагнитами :Г1 и 12.
Управляющий элемент 8 механически связан с переключателями 13 и 14 и задатчиком 15 скорости.
Датчик 16 обратной связи механически связан с барабаном 1 лебедки, причем выходной сигнал датчика пропорционален скорости лебедки и подключен к элементам 17 и 18 сра-анения.
Датчик 19 предназначен для измерения на кране величины пропорциональной весу груза, для преобразования этой величины в электрический сигнал, имеющий функциональную зависимость от измеряемой величины, и для задания безопасной величины скорости для данного груза, причем выход датчика 19 подключей к элементу 18 .сравнения.
Элементы 20 и 21 блокировок управляют электромагнитами 11 и 12.
Датчики 22, 23 с выходами а, б предельных (крайних) положений и датчик 24 нулевого положения управляющего гидроцилиндра 9 связаны с его штоком.
Блок 25 подъема и блок 26 опуска управляются переключателем 13, при этом выход блока 25 подъема подключен к элементу 20 блокировки, а выходблока 26 спуска - к элементу 21 блокировки.
Блок 27 памяти подъема и блок 28 памяти спуска обеспечивают возврат люльки насоса 3 нулевую позицию при отключении лебедки г. ПОМОЩЬЮ кнопки 29, резком возврате или реверсе .управляющего элемента 8. Блоки 27 и 28 Подключены параллельно блокам 25 и 26 через элементы 30 и 31 односторонней проводимости. цепи питания блока 27 установлены логические элементы 32 «И, 33 «НЕ, 34 «НЕ, которые управляются соответственно сигналами блока 27, блока 28 и датчика 24 .нулевого положения, а в щепи питания блока 28 памяти спуска установлены логические элементы 35 «И, 36 «НЕ, 37 «НЕ, которые управляются соответственно сигналами блока 28, блока 27 и датчика 24 нулевого положения.
Блок 38 защиты управляет цепью, обеспечивающей возврат люльки насоса IB «нулевую позицию, в элементах 20 и 21 блокировки.
Блок 39 времени обеспечивает задержку включения электромагнита 40 тормоза лебедки с целью исключения самопроизвольного опускания груза перед началом движения. Блоки 38 и 39 подключены к цепям управления блоков 25 и 26 через элемент 41, выполняющий функцию «ИЛИ.
Элементы 20 и 21 блокировки обеспечивают включения и отключения электромагнитов 11 и 12 включение насоса 3, изменение его производительности, возврат в нулевую позицию и его реверс. На чертеже элементы 20 и 21 блокировок
изображены, например, в виде системы контактов с индексацией, которая соответствует индексации функциональных блоков, при этом контакты элементов 17 и 18 сравнения, производящие увеличение производительности насоса, обозначены соответственно Sj, 02 и ei, г, а производящие уменьшение производительности-обозначены ез, в и гз, г и подключены последовательно при прямом движении и параллельно - через элементы односторонней проводимости - при возвратном движении гидроцилиндра 9 .насоса 3. Выходы блока 25 обозначены буквой с, блока 26 - е, 27 - ж, 28 - 3, 38 - «ь «2.
Элементы 42 и 43, выполняющие операцию ИЛИ, установлены в цепях блоков 25 и 26 подъема и спуска и осуществляют блокировку, обеспечивающую возможность включения движения лебедки только при нулевой производительности насоса 3, и управляются сигналом датчика 24.
Устройство работает следующим образом.
При перемещении управляющего элемента
8на подъем переключатель 13 подает питание в цепь блока 25 лодъема. При гидроцилиндре
9находящемся в нулевой позиции, датчик 24 замыкает цепь питания блока 25 подъема через элемент 42 «ИЛИ и подает питание на блок 27 памяти подъема, При. этом блок 25 подъема блокирует выход датчика нулевого положения гидроцилиндра, а блок 27 памяти подъема подключается через элементы 32 .И, управляемые элементами 33 и 34. Одновременно через элемент 41 питание поступает на блок 38 защиты и блок 39 времени. Через заданную величину времени блок 39 включает электромагнит 40 тормоза лебедки. Одновременно с замыканием переключателя .13 управляющий элемент 8 перемещает задатчик 15 скорости, а сигнал, пропорциональный перемещению рукояти, поступает на элемент 17 сравнения, который через элемент 20 блокировок подает питание на электромагнит 11 электрогидрозолотника 10. Последний подает лсидкость IB гидроцилиндр 0, который перемещает люльку насоса 3 в позицию соответствующую положению элемента управления, а лебедка при этом движется на подъем.
При дальнейшем перемещении управляющего элемента 8 сигнал задатчика 15 скорости возрастает. Гидроцилиндр 9 перемещает люльку насоса 3, производительность которого увеличивается, увеличивается и скорость лебедки, а также сигнал датчика 16 обратной связи. По достижении скорости, заданной датчиком 19, элемент 18 сравнения контактом &i отключает электромагнит И трехпозиционного электрогидрозолотника 10, и при дальнейшем перемещении рукояти скорость груза не увеличивается.
При плавном возврате управляющего элемента 8 в нулевую позицию выход элемента 17 сравнения подключает электромагнит 12, и гидроцилиндр 9 совершает возвратное движение, а скорость лебедки уменьшается. При
резком возврате элемента управления в «улевую позицию, например при опасности аварии, лебедка останавливается путем обесточиваиия электромагнит 5, насос 3 возвращается в нулевую позицию при помощи выходных элементов «2, ж.
Груз опускается путем перемещения управляющего элемента 8 в позицию «Спуск, причем порядок работы элементов схемы аналогичен вышеописанному порядку работы при подъеме. При необходимости обеспечить спуск с заданной микроскоростью управляющий элемент 8 устанавливается в первую фиксированную позицию на «GnycK, и через -переключатель 14 включаются электромагнит 7 и золотник 6, который в свою очередь включает дроссель с регулятором.
Предлагаемое устройство обеспечивает: регулирование скоростей в диапазоне переменной производительности «асоса, ограничение максимальных скоростей в зависимости от заданных параметров; быстрый оброс скорости; особо малую скорость движения, т. е. позволяет увеличить рабочие скорости лебедки гарантироваиной при безопасности работ, а следовательно и увеличить производительность.
Формула изобретения
1. Устройство для дистанционного управления лебедкой грузонодъемиого механизма с
гидроприводом, содержащее управляющий элемент, цепи управления подъемом и спуском, а также скоростью лебедки, о т л и ч а ющ е е с я тем, что, с целью повышения производительности при обеспечении безопасности работ, цепи управления подъемом, спуском и скоростью снабжены блоками направления, памяти направления движения, защиты и времени включения тормоза лебедки, логическими элементами управления и датчиками положения люльки насоса, гидропривода, причем упомянутые блоки памяти на-правления движения подключены к блокам направления через элементы односторонней проводимости,
блоки защиты и задержки включения тормоза через логический элемент «ИЛИ связаны со входами блоков памяти направления движения, а выход цепей управления через элементы блокировок связан с электромагнитами
золотников гидроцилиндра насоса.
2. Устройство по п. 1, отличающееся тем, что оно снабжено схемой сравнения сигналов, содержащей параметрический датчик ограничения скорости и датчик обратной свяаи, кинематически соединенный с барабаном грузовой лебедки и электрически-с двумя элементами сравнения, которые подключены к электромагнитам золотника гидроцилиндра последовательно при прямом движении и параллельно - через элементы односторонней проводимости - 1при возвратном движении гидроцилиндра насоса.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1997 |
|
RU2131394C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫНОСНЫМИ ОПОРАМИФу^'.Д 'i.-i.''--'—-• | 1971 |
|
SU422681A1 |
| Устройство управления рабочим обрудованием укладчика сборного бордюра | 1972 |
|
SU502999A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2001 |
|
RU2220431C2 |
| Гидравлический привод затворов | 2023 |
|
RU2840451C2 |
| Гидросистема грузоподъемного крана | 1991 |
|
SU1789788A1 |
| Система автоматического управления процессом разгрузки ковша скрепера | 1987 |
|
SU1444481A1 |
| Мобильное энергетическое средство | 1988 |
|
SU1504148A1 |
| Устройство для автоматического управления подачей по величине крутящего момента на сверле | 1980 |
|
SU904913A1 |