1
Изобретение относится к областн контроля и управления перемещающимися объектами и может быть использовано для автоматизации производствеиных процессов, включающих в себя доставку материалов в места назначения, например, с помощью штабелера.
Известно устройство для автоматического адресования объекта, использующее так называемый позицнонный принцип адресования, при котором каждой ячейке склада по координате (длине, высоте) соответствует свой датчик, расположеиный на неподвижной частн, а воздействующий элемент, например, экран бесконтактных конечных выключателей или постоянный магнит магннтоуправляемь|х контактов, находнтсй на штабелере j1).
Недостатком этого устройства является его сложность, особенно прн больщом колнчестве позиций адресования, а также отсутствие автоматического регулирования скорости в зоне точного останова н останов в заданной позиции на рейсовой скорости.
Известно также устройство для автоматических) адресования объекта, содержащее датчики положения, включающие в себя каждый подвижный н неподвижный коитакты, задатчик адреса, выполнеиный на переключателе, неподвижные контакты которого соединены между собой через резисторы, причем первый и последний резисторы подклюмены к источнику постоянного напряжения, элемент И и блок сравнения, соединенный входом с задатчнком адреса, а выходом - с блоком управления движением объекта 2) Данное устройство является наиболее близким к изобретению по техннческой сущности и достигаемому результату.
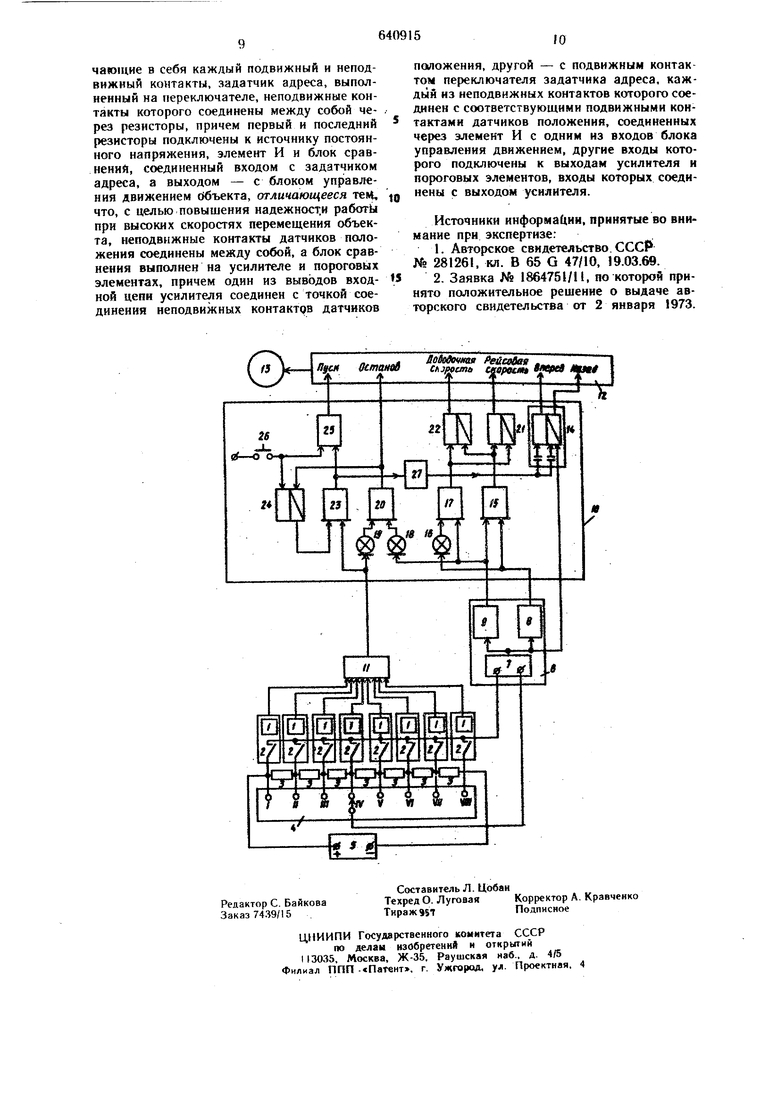
В известном устройстве подход подвижного объекта к месту останова н останов его возможен только на рейсовой скорости, что приводит к необходнмости ее умеиьшения для избежания динамических перегрузок и, следовательно, к снижению производительности и надежности -работы. Кроме того, недостатком известного устройства является отсутствие автоматической коррекции положения объекта в случае его остаиова в заданной позиции с отклонениями, большими допустимых, а также невысокая надежность системы адресования, так как в случае несрабатывания датчика положения, при попадании объекта в заданную познцию, он проходит мимо и не возвращается в нее автоматически. Цель изобретения - повышение надежности работы при высоких скоростях перемещения объекта. Указанная цель достигается тем, что неподвижные контакты датчиков положения соединены между собой, а блок сравнения вынолнен на усилителе и пороговых элементах, причем один «из выводов входной цепи усилителя соединен сеточкой соединения неподвижных контактов датчиков положения, другой - с подвижным контактом переключателя, задатчика адреса, каждый из неподвижных контактов которого соединен с соответствующими подвижными контактами датчиков положения, соединенных через элемент И с одним нч входов блока управления движением, другие входы которого подключены к выходам усилителя и пороговых элементов, входы которых соединены с выходом усилителя. Изобретение иллюстрируется чертежом, на котором в качестве примера приведена схема на восемь позиций для одного направления {горизонтального или вертикального) движения штабелера. Устройство автоматического адресования содержит датчики 1 положения с бecкq тактным выходом, имеющие на выходе подвижный и неподвижный контакты (например, бесконтактные конечные выключатели, у которых в цепь коллектора выходного транзистора включено реле), соответствующие позициям I-Vin склада. Между их подвижными контактами 2 включены резисторы 3. К этим же выводам контактов 2 подключены неподвижные контакты задатчика адреса, выполненного в виде переключателя 4. Крайние концы потенциометра, образованного резисторами 3, подключены к источнику 5 постоянного напряжения. Неподвижные контакты положения, соединенные между собой, и подвижный контакт переключателя 4 подключены к входу находяще- гося в блоке сравнения 6 усилителя 7. Выход усилителя 7 непосредственно, а также через пороговые элементы 8 и 9, подключен к блоку 10 управления движением объекта. Бесконтактные выходы датчиков 1 положения через элемент И 11 также соединены с блоком 10 управления. Выходы блока управления соединены с блоком 12 включения электродвигателя 13. В приведенном варианте блок 10 управления движением содержит: триггер 14, вход которого соединен, с выходом усилителя 7, а выходы - с блоком 12 включения электродвигателя 13 (команды «Вперед и «Назад), элемент И 15, два входа которого соединены с выходами пороговых элементов 8 и 9, элемент НЕ 16, вход которого соединен с выходом порогового элемента 8, элемент И 17, один вход которого соединен с выходом порогового элемента 9. а второй - с выходом элеменга ilH 16, элемент НЕ 18, вход которого соединен с выходом порогового элемента 9, элемент НЕ 9, вход которого соединен с выходом элемента И П; элемент И 20, входы которого соединены с выходами элементов 18 и 19, а выход - с блоком 12 включения электродвигателя (команда «Останов), триггер 21, один вход которого соединен с выходом элемента И 5, второй вход - с выходом элемента И 17, а выход с блоком включения электродвигателя (команда «Рейсовая скорость), триггер 22, один вхс д которого соединен с выходом элемента И 15, второй - с выходом элемента И 17, а выход - с выходом блока 12 включения электродвигателя (команда «Доводочная скорость), элемент И 23, один вход которого соединен с выходом элемента И П, триггер 24, выход которого соединен с вторым входом элемента И 23, а один вход - с выходом элемента И 20, элемент ИЛИ 25, один вход которого соединен с вторым входом триггера 24, второй вход - с выходом элемента И 23, а выход - с входом блока 12 включения электродвигателя (команда «Пуск), кнопка 26 подачи команды «Пуск, соединенного одним контактом с источником напряжения, вторым - с входами триггера 24 и элемента ИЛИ 25, потенциально-импульсную ячейку 27, преобразующую сигнал постоянного потенциального уровня в импульсный сигнал, вход которой соединен с выходом элемента И 23, выход - с счетным входом триггера 14. Устройство работает следующим образом. При протекании тока от источника 5 напряжения через потенциометр, образованный резисторами 3, имеющими одинаковые сопротивления, на каждом из них образуется вполне определенное и одинаковое падение напряжения. При нахождении подвижного контакта задатчика адреса и штабелера на складе в положениях, соответствующих (схемно) разным позициям склада, на вход усилителя 7 подается напряжение, зависящее от количества резисторов 3, заключенных между подвижным контактом задатчика и замкнутыми контактами 2, сработавщего соответствующего датчика положения (например, если задатчик находится в положении IV, а штабелер - в положении VII, между подвижным контактом задатчика и замкнутым контактом 2 релейного элемента, соответствующим VII позиции, заключено 3 резистора). Полярность этого напряжения также зависит от взаимного положения подвижного контакта задатчика и замкнутых в данный момент соответствующих контактов 2. (В рассматриваемом случае с подвижного контакта переключателя 4 на вход усилителя подается положительный потенциал, с замкнутого контакта 2 позиции УП - . отрицательный). При смене полярности сигнала на входе усилителя изменяется полярность напряжения и на его выходе. Усилитель 7 настраивается таким образом, что при подаче на его вход напряжения, cHHNfacMoro с двух и более последовательно соединенных резисторов 3, величина напряжения на выходе достаточна для срабатывания обоих пороговых элементов 8 н 9. При подаче на вход усилителя напряжения, снимаемого с одного резистора 3, на выходе усилителя имеется напряжение, достаточное для срабатывания только порогового элемента 9, а элемент 8 не срабатывает. Ниже приводится описание работы схемы устройства адресования с подробным разбором приведенного варианта исполнения блока сравнения 6. Сущность работы схемы состоит в контроле величины и полярности напряжения, поступающего на вход блока сравнения 6, причем полярность напряжения определяет направление движения штабелера, а величина - степень удаления штабелера от выбранной позиции и величину скорости. При нахождении подвижного контакта переключателя 4 и- штабелера в положениях, соответствующих одной и той же позиции склада (например, подвижный контакт задатчика находится в положении IV и замкнут контакт 2 датчика положения, соответствующего положению штабелера в IV позиции склада), напряжение на входе усилителя 7 равно нулю. При это.м выходное напряжение усилителя 7 также равно нулю (недостаточно для срабатывания обоих пороговых элементов 8 и 9). На выходе порогового элемента 9 и на входе элемента НЕ 18 имеется сигнал «О, на выходе элемента 18 - сигнал «I. На бесконтактном выходе сработавшего датчика положения позиции IV имеется сигнал «О, поступивший через элемент И 11 на вход элемента НЕ 19, на выходе которогО;Как и на входе элемента И 20, появляется сигнал «1. Вследствие этого и на выходе элемента И 20 также имеется сигнал «1, что соответствует подаче на вход блЬка включения двигателя команды «Останов. При этом на один из входов с триггера 24 подается сигнал «1, соответствующий появлению на его выходе и входе элемента И 23 сигнала «1. При нахождении подвижного контакта переключателя 4 и штабелера в положениях, соответствующих различным позициям склада (например подвижный контакт в положении IV, а штабелер в позиции VII), на входе усилителя имеется напряжение определенной полярности и величины, при которых на его выходе напряжение по величине достаточно для срабатывания обоих пороговых элементов 8 и 9. Полярность выходного напряжения усилителя такова, что триггер 14 устанавливается в положение. пря котором с одного из его выходов на вход блока включения электродвигателя подается сигнал «1, соответствующий команде задания направления движения, например «Назад. На счетном входе триггера напряжение отсутствует, так как на выходе элемента И 23 и ячейки 27 имеется сигнал сО вследствие нулевого сигнала на выходе элемента И 11, обеспечиваемого фиксированным положением штабелера в позиции VII и нулевым сигналом на бесконтактном выходе датчика 1 положения этой позиции. Наличие «единичных сигналов на выходах пороговых элементов 8 и 9 приводит к поярлению сигнала « на выходе элеменга И 15 н триггера 21, вследствие чего на вход блока 12 включения подается команда выбора величины скорости «Рейсовая скорость. Одповременио через элементы НЕ 18 н И 20 снимается сигнал «I с входа блока управления «Остапоп. Триггер 22 устанавливается в положение, при котором на его выходе « отсутствует (подачей на его вход сигнала «Ь с элемента И 15) и команда «Доводочная скорость с входа блока 12 включения сни.мается. Для запуска электропривода перемещения щтабслера кратковременно нажимается кнопка 26. При этом подается сигнал на один из в.ходов триггера 24,, при. которых с 1имается едииичнь Й сигнал с входа элемента И 23 и этим запрещается подачу сигнала через ячейку 27 на счетный вход триггера 4. Одновреме н;о через элемент ИЛИ 25 ка вход блока 2 включения подается команда «Пуск. В соответствии с командами «Назад и «Рейсовая скорость штабелер начинает движение назад на максимальной скорости по направлению к позиции V. При пыходе из положения, фиксирующего позицию Vn склада, появляются сигналы «О на выходах элементов 7, 8, 9, сигналы «1 на всех бесконтактных выходах датчиков 1 положения, а также элементов if М и НЕ 8, сигнал «О иа выходе элементов НЕ 19 и Н 23. Характер команд, пoдaF ныx на вход блока 12 включения, не изменяется. Запоминание команды «Пуск производится эле. блока 12 включения. При прохождении щтабелером позиции VI на выходе урилктеля 7 появляется напряжение тон же поляр1юсти (что и в позиции VII) и той же вел 1чины, при которой срабатывают оба пороговых элемента 8 и 9. Штабелер продолжает движение «Назад на рейсовой скорости. При прохождении штабслером позииии V на вход усилителя 7 подается напряжср1не, снимаемое с одного резистора 3, при котором на выходе появляется напряжение той же полярности, но величины, при которой срабатывает только порпгонын элемент 9
(элемент 8 ме срабатывает). На одном входе элемента И 5 появляется сигнал «О. На один вход элемента И 17 с выхода по рогового элемента 9 подается сигнал «1, на второй его вход с элемента НЕ 16 подается сигнал «I (инверсия иулевого сигнала с выхода порогового элемента 8). В резу..ьтате на выходе элемента И 17 появляется сигнал, переводящий триггер 22 в полйжение, соответствующее подаче на вход блока 2 включения сигнала «1 - «Доводочная скорость,.а триггер 21 в положение, соответствующее съему с его выхода сигнала «1, а с входа блока 12 включения - команды «Рейсовая скорость. Блок включения переводит электродвигатель в режим торможения до доводочной скорости, интенсивность которого определяется требуемой величиной снижения скорости и расстоянием между двумя фиксированными положениями штабелера.
К выбранной позиции штабелер подходит на доводочной скорости.
При п М1адаиии штабелера в место точного останова (замыкается контакт элемента 2 датчика положения позиции IV) на вход усилителя 7 подается нулевой сигнал, вследствие чего не срабатывают оба пороговых элемента 8 и 9, и на их выходах появляются сигналы «О, на выходах элементов И 15 и 17 - также сигналы «О. На один вход элемента И 20 с выхода элемеита НЕ 18 подается сигнал «1, а на второй его вход - сигнал «1 с выхода элемента НЕ 19 (инверсия сигнала «О, подаваемого через элемент I {, с бесконтактного входа выхода датчика I положения, позиции IV). На выходе элемента И 20 появляется сигнал «I, соответствующий подаче на вход блока 12 включения команды «Останов. Происходит отключение двигателя при доводочной скорости штабелера и его точный останов электромеханическими тормозными устройствами.
Одновременно на вход триггера 24 подается сигнал «I, устанавливающий его в положение, при котором на один вход элемента И 23 подается сигнал «I. В случае, если штабелер по каким-либо причинам проходит мимо позиции IV или остаиавливается относительно нее с отклонением, большим допустимого, происходит появление сигиала «i на бесконтактном выходе датчика I положения позиции IV и на выходе элемента И 11 (на выходах всех остальных выключателей также имеются «едииичные сигналы) . На вход элемента И 20 через элемент НЕ 19 подается сигнал «О.
Сигнал «1 с выхода элемента И 20 и сигнал «1 команды «Останов с входа блока 12 включения снимаются. Одновремеиио на второй вход элемента И 23 подает. ся сигнал «1, вызывающий появление сигнала вход блока 12 управления - команда «Пуск. Одновременно сигнал «1 подается на вход ячейки 27, с выхода которой импульсный снгнал подается на счетный вход триггера 14, который переходит во второе устойчивое положение, соответствующее подаче с второго его выхода единичного сигнала и команды «Вперед (сигнал на выходе усилителя отсутствует). Штабелер на доводочной скорости возвращается к выбранной позиции IV.
Для перевода штабелера в новую позицию скла.51а необходимо задатчик адреса установить в требуемое положение и нажать кнопку 26. При этом перевод штабелера на соседнюю позицию склада производится на доводочной скорости (в момеит пуска срабатывает только пороговый элемент 9).
При высоких скоростях перемещения и необходимости глубокого снижения скорости штабелера путем получения двух ступеней снижения скорости (первое снижение скорости - за две позиции, второе - за одну позицию до выбранной и места точного останова). В состав блока сравнения вводится три пороговых элемента. При этом один из них настраивается на напряжение срабатывания, получаемого с выхода усилителя 7, когда на его вход подается напряжение с одного из резисторбв 3 (штабелер находится на расстоянии одной позиции до выбранной); для срабатывания второго порогового устройства необходимо напряжение на выходе усилителя, когда на его входе имеется напряжение, снимаемое с двух резисторов 3 (штабелер находится за две позиции до выбранной); третий пороговый элемент настраивается на напряжение срабатывания, когда на вход усилителя подается напряжение с трех последовательно соединенных резисторов и более (три и более позиции до выбранной). Логическая схема 0 управления при этом дополняется элементами, обеспечивающими подачу на вход блока 12 включения вместо команды «Рейсовая скорость двух команд «1 рейсовая скорость, «II рейсовая скорость.
Таким образом, устройство для автоматического адресования, осуществляя выбор направления движения и коррекцию положений объекта относительно заданной позиции, позволяет просто рещить задачу перемещения объекта на максимальной рейсовой скорости к зоне выбранной позиции, автоматического снижения скорости с рейсовой до доводочной за одну, а также две или более позиций до выбранной, подхода объекта к месту точного останова на доводочной скорости и его точного останова на доводочной скорости.
Формула изобретения
Устройство для автоматического адресования объекта, преимущественно штабелера, содержащее датчики положения, вютю


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления подвижным объектом | 1972 |
|
SU716944A1 |
| Устройство программного управления подвижным объектом | 1977 |
|
SU653189A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПЕРЕМЕЩЕНИЯ СКЛАДСКИХ ГРУЗОВЫХ ПЛАТФОРМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2470316C1 |
| Устройство для автоматическогоВыбОРА НАпРАВлЕНия дВижЕНия Об'ЕКТА | 1979 |
|
SU800071A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯШТАБЕЛЕРОМ | 1969 |
|
SU257577A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПЕРЕМЕЩЕНИЯ СКЛАДСКИХ ГРУЗОВЫХ ПЛАТФОРМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569812C1 |
| Устройство для автоматического адресования транспортного средства | 1986 |
|
SU1388904A1 |
| Устройство для автоматического управления краном-штабелером | 1971 |
|
SU473187A1 |
| Устройство для автоматического адресования транспортного средства | 1973 |
|
SU468562A1 |
| Устройство для автоматического адресования транспортных средств | 1983 |
|
SU1089586A1 |
