1
(21)4427279/30-15
(22)16.05.88
(46) 15.02.90. Бюл. № 6
(71)Центральное проектно-конструк- торское и технологическое бюро Министерства легкой промышленности ЛатвССР
(72)С.В. Захаров, Е.А. Бурмитров и В.В. Андриенко
(53) 621.316.718.5 (088.8)
(56)Авторское свидетельство СССР № 1274102, кл. Н 02 Р 5/06, 1985.
(54) СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ ПО ТРАССЕ- ОРИЕНТИРУ
(57)Изобретение относится к автоматике и может быть использовано в системах управления внутрицеховыми безрельсовыми транспортными средствами. Цель изобретения - расширение функциональных возможностей системы путем автоматической сцепки и расцепки транспортных средств. Система содержит трассу-ориентир 1, блок 3 адресования, элементы 2 считывания команд, блок 5 формирования команд Пуск-останов, блок 6 управления тяговым электродвигателем, фотодатчик 4 контроля ошибок оператора 4, десять схем 9,14,17,19,20,29,30,32,33,36 совпадения, четыре датчика 29,31,34,37 положений, датчик 15 контакта, шесть концевых переключателей 21,23,24,25, 27,35, формирователь 18 импульса окончания позиционирования, формирователь 13 режимов, отражатель 7, фотодатчик 8 останова и четыре привода 10, 16, 22, 26 линейного перемещения с их связями. Подавая сигналы на приводы линейных перемещений, выдвигают или убирают их, производя захват тележки и вывод ее на трассу, или с трассы ставят тележку на рабочую позицию. 2 з.п.ф-лы, 2 ил.
(/
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления автоматического напольного электротранспорта | 1985 |
|
SU1274102A1 |
| Устройство для точного адресования передаточной тележки | 1978 |
|
SU747789A1 |
| Устройство для адресования транспортного средства | 1987 |
|
SU1618706A1 |
| Устройство программного адресования транспортного средства | 1983 |
|
SU1113337A1 |
| Устройство для управления движением транспортного средства | 1986 |
|
SU1317401A1 |
| Устройство для точного адрессования электропередаточной тележки | 1976 |
|
SU596518A1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
| Устройство для адресования транспортного средства с электроприводом | 1987 |
|
SU1431988A2 |
| Устройство для управления транспортным механизмом | 1977 |
|
SU703830A1 |
| Устройство для управления движением транспортного средства | 1989 |
|
SU1735809A2 |
Изобретение относится к автоматике и может быть использовано в системах управления внутрицеховыми безрельсовыми транспортными средствами. Цель изобретения - расширение функциональных возможностей системы путем автоматической сцепки и расцепки транспортных средств. Система содержит трассу-ориентир 1, блок 3 адресования, элементы 2 считывания команд, блок 5 формирования команд "Пуск-останов", блок 6 управления тяговым электродвигателем, фотодатчик 4 контроля ошибок оператора, десять схем 9,14,17,19,20,29,30,32,33,36 совпадения, четыре датчика 29,31,34,37 положений, датчик 15 контакта, шесть концевых переключателей 21,23,24,25,27,35, формирователь 18 импульса окончания позиционирования, формирователь 13 режимов, отражатель 7, фотодатчик 8 останова и четыре привода 10,16,22,26 линейного перемещения с их связями. Подавая сигналы на приводы линейных перемещений, выдвигают или убирают их, производя захват тележки и вывод ее на трассу, или с трассы ставят тележку на рабочую позицию. 2 з.п.ф-лы, 2 ил.
ел
Јъ
ОЭ СП
1C
Јь
(pu&i
Изобретение относится к автоматике и может быть использовано в системах управления внутрицеховыми без™ ррлъсонымн транспортными средствами.
Цель изобретения - расширение функциональных возможностей системы путем автоматической сценки и расцепки транспортных средств.
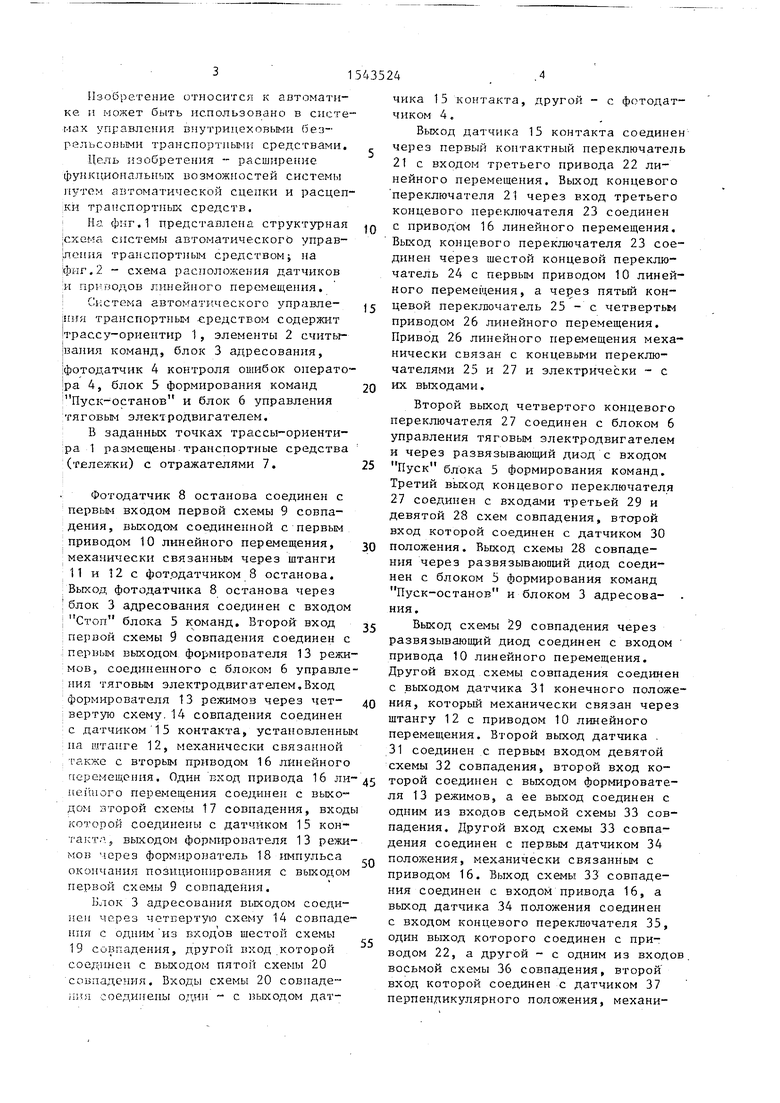
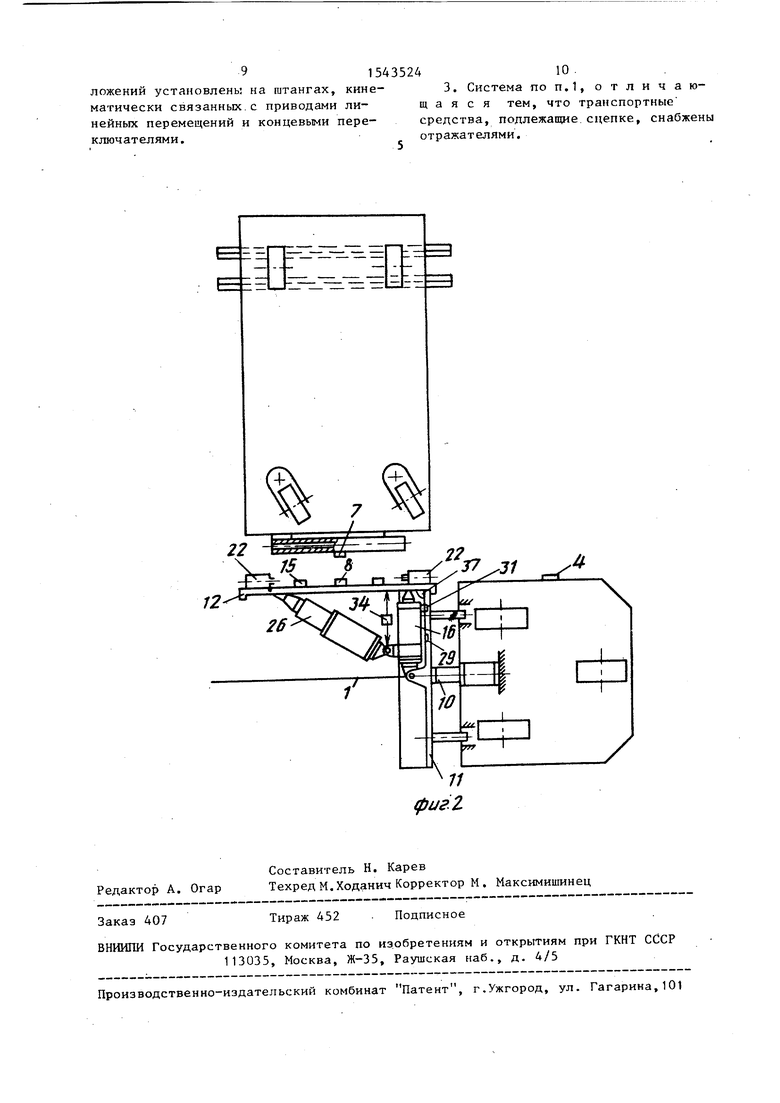
Нз фпг.1 представлена структурная cxet c- системы автоматического управления транспортным средством -9 на фнг.2 - схема расположения датчиков и npi яодов гннейного перемещения,
Сьстома автоматического управле- штя транспортным средством содержит трассу-ориентир 1, элементы 2 считывания команд, блок 3 адресования, фотодатчик 4 контроля ошибок оператора 4, блок 5 формирования команд Пуск-останов и блок 6 управления тяговым электродвигателем,
В заданных точках трассы-ориентира размещены транспортные средства (тележки) с отражателями 7.
Фотодатчик 8 останова соединен с первым входом первой схемы 9 совпадения, выходом соединенной с первым приводом 10 линейного перемещения, механически связанным через штанги 11 и 12 с фот.одатчиком 8 останова. Выход фотодатчика 8 останова через блок 3 адресования соединен с входом Стоп блока 5 команд. Второй вход первой схемы 9 совпадения соединен с первым выходом формирователя 13 режимов, соединенного с блоком 6 управления тяговым электродвигателем„Вход формирователя 13 режимов через чет- зертую схему 14 совпадения соединен с датчиком 15 контакта, установленны на штанге 12, механически связанной акхе с вторым приводом 16 линейного перемещения. Один вход привода 16 ли ценного перемещения соединен с выходом згорой схемы 17 совпадения, вход которой соединены с датчиком 15 контакт.-- s выходом формирователя 13 режимов через формирователь 18 импульса окончания позиционирования с выходом первой схемы 9 совпадения.
Блок 3 адресования выходом соединен чррез четвертую схему 14 совпадения с одним из входов шестой схемы 19 совпадения, другой вход которой соединен с выходом пятой схемы 20 совпадения. Входы схемы 20 совпаде- ii,я соединены один с выходом дат
0
5
о $ о 5
0
5
чика 15 контакта, другой - с фотодатчиком 4,
Выход датчика 15 контакта соединен через первый контактный переключатель 21 с входом третьего привода 22 линейного перемещения. Выход концевого переключателя 21 через вход третьего концевого переключателя 23 соединен с приводом 16 линейного перемещения. Выход концевого переключателя 23 соединен через шестой концевой переключатель 24 с первым приводом 10 линейного перемещения, а через пятый концевой переключатель 25 - с четвертым приводом 26 линейного перемещения. Привод 26 линейного перемещения механически связан с концевыми переключателями 25 и 27 и электрически - с их выходами.
Второй выход четвертого концевого переключателя 27 соединен с блоком 6 управления тяговым электродвигателем и через развязывающий диод с входом Пуск1 блока 5 формирования команд. Третий выход концевого переключателя 27 соединен с входами третьей 29 и девятой 28 схем совпадения, второй вход которой соединен с датчиком 30 положения. ВЬЕХОД схемы 28 совпадения через развязывающий диод соединен с блоком Ь формирования команд Пуск-останов и блоком 3 адресования.
Выход схемы 29 совпадения через развязывающий диод соединен с входом привода 10 линейного перемещения. Другой вход схемы совпадения соединен с выходом датчика 31 конечного положения, который механически связан через штангу 12 с приводом 10 линейного перемещения. Второй выход датчика 31 соединен с первым входом девятой схемы 32 совпадения, второй вход которой соединен с выходом формирователя 13 режимов, а ее выход соединен с одним из входов седьмой схемы 33 совпадения. Другой вход схемы 33 совпадения соединен с первым датчиком 34 положения, механически связанным с приводом 16. Выход схемы 33 совпадения соединен с входом привода 16, а выход датчика 34 положения соединен с входом концевого переключателя 35, один выход которого соединен с приводом 22, а другой - с одним из входов восьмой схемы 36 совпадения, второй вход которой соединен с датчиком 37 перпендикулярного положения, механи
чески связанным через штангу 11 с приводом 16.
Выход схемы 36 совпадения через диодное устройство соединен с входом концевого переключателя 23.
Система работает следующим образом
Перед движением по трассе-ориентиру 1 в автоматическом режиме система управления кодируется по необходимым остановкам, например, с тумблеров и кнопок в блоке 3 адресования, которыми оператор задает требуемый маршрут со всеми остановками.
Первоначальный пуск средства по трассе осуществляется подачей диспетчером-оператором, например, посредством кнопки на пульте сигнала Пуск на вход блока 5 формирования команд Пуск-останов.
Далее транспортное средство при подходе к месту сцепки (захвата) тележки снижает скорость и при совмещении фотодатчика 8 с кодовым отражателем 7 с фотодатчика через блок 3 адресования поступает команда Останов в блок 5, Одновременно с блока 3 адресования поступает сигнал через схему 14 совпадения на формирователь 13 режимов, который выдает сигналы разрешения и блокировки для реализации режима захвата (сцепки) тележки или постановки ее в заданный адрес и расцепки с транспортным средством. i
Если после торможения фотодатчик
8 не совмещен с кодовым отражателем 7, то сигнал с фотодатчика поступает через схему совпадения к приводу 10 линейного перемещения. После отработ- ки привода на выпуск и совмещения фотодатчика 8 и отражателя 7, сигнал с выхода схемы 9 совпадения через формирователь 18 импульса окончания позиционирования и схему 17 совпадения поступает к приводу 16 линейного перемещения. Привод 16 работает на выпуск до срабатывания датчика 15 контакта, который через концевой переключатель 21 включает привод 22 линейного пере- мещения на выпуск, и происходит захва (сцепка) тележки. После отработки привода 22 концевой переключатель 21 выдает сигнал через концевой переключатель 23 на уборку привода 16 линейно- |го перемещения, после отработки которого сигнал от концевого переключателя 23 поступает на уборку привода линейного перемещения, а через концевые
0
5
0
5
5
0 5 0 5
0
переключатели 24 и 25 - на уборку привода 26 линейного перемещения , Одновременно подается команда Пуск на блок Ь. Режим захвата (сцепки) закончен.
Режим постановки тележки в заданный адрес осуществляется следующим образом.
В соответствии с заданной программой транспортное средство снижает скорость и останавливается. С блока 3 адресования через схему 14 совпадения при наличии разрешения с датчика 15 контакта сигнал поступает на формирователь 13 режимов и через схему 19 совпадения и концевой переключатель 27 к приводу 26 линейного перемещения на выпуск. После отработки привода 26 концевой переключатель 27 выдает сигнал Пуск на блок 5 и сигнал Назад на блок 6 управления тяговым электродвигателем. Транспортное средство, двигаясь назад вдоль трассы-ориентира 1, разворачивает тележку в направлении, перпендикулярном трассе. При развороте корпус привода 16 механически воздействует на датчик 30 положения, с которого через схему 28 совпадения при наличии разрешения с концевого переключате-. ля 27 поступает сигнал Стоп на блок 5. Этот же сигнал через схему 29 совпадения поступает на привод 10, который, выдвигая штангу 11, продолжает разворот тележки после остановки транспортного средства, пока ее ось не окажется перпендикулярной оси транспортного средства (трассы-ориентира) , и штанги 11 и 12 зафиксируются. После этого корпус привода 16 механически воздействует на датчик 31, который выключает привод 10 линейного перемещения и подает сигнал через схемы 32 и 33 совпадения на выпуск привода 16 линейного перемещения и уборку приводов 22. Тележка выталкивается с трассы-оригнтира 1 на исходную позицию до срабатывания датчика 34, который подает сигнал на привод 22 линейного перемещения на уборку для освобождения тележки и через схему 33 совпадения на привод 16, который отключается.
После произведенной расцепки (освобождения тележки) сигнал с концевого переключателя 35 через схему 36 совпадения и концевой переключатель 23 поступает на привод 16, который
контакта и входом первого концевого выключателя, к второму входу схемы сравнения подключен выход фото- датчика контроля ошибок оператора,выход пятой схемы совпадений соединен с вторым входом шестой схемы совпадений, к первому входу которой подключен выход четвертой схемы совпадений и
15
20
25
отодвигает штангу 12 от тележки, при этом привод 16 работает до срабатывания датчиков 37. Датчик 37 подает сигнал Пуск блоку 5 и через концевой переключатель 24 и уборку привода 10. Режим постановки тележки завершен,
Для исключения аварии при ошибках рператора в формировании адреса поста- IJIOBKH тележки фотодатчик 4 подает че- JQ вход формирователя режимов, выход вто- , рез схемы 20 и 19 совпадения сигнал, Запрещающий включение привода 26 и, ответственно, продолжение всего ре- Жима постановки,
формула изобретения
I. Система автоматического управ- 4ения транспортным средством по трас- de ориентиру, содержащая транспортное Средство с тяговым электродвигателем ъ блоком его управления и схему управления, отличающаяся тем, что, с целью расширения функцио- |сальных возможностей системы путем Автоматической сцепки и расцепки франспортных средств, схема управ- #ения включает элементы считывания команд, блок адресования, фотодатчик Контроля ошибок оператора, блок формирования команд Пуск-останов,фо фодатчик останова, десять схем совпадения, четыре датчика положений, йатчик контакта, шесть концевых переключателей, формирователь импульса ркончания позиционирования, формирователь режимов и диоды развязки, при Јтом фотодатчик останова соединен с первым входом первой схемы совпадения и блоком адресования, выход первой схемы совпадения соединен через формирователь импульса окончания по- биционирования с входом второй схемы совпадения и через диод развязки с входом первого привода линейного перемещения, а также с выходом третьей схемы совпадения, к другому входу блока адресования подключены злемен ты считывания команд, а выходы подсоединены к входу Стоп блока фор мирования команд Пуск-останов, входу фотодатчика контроля ошибок оператора и к второму входу четвертой схемы совпадения, второй вход первой схемы совпадения соединен с третьим входом схемы совпадения и первым вы- кодом .формирователя режимов, первый вход четвертой схемы совпадения соединен с первыми входами второй и пятой схем совпадения, выходом датчика
30
35
40
45
50
55
рой схемы совпадений через диоды развязки соединен с входом второго привода линейного перемещения и выходом седьмой схемы совпадений, первый вход которой соединен с выходом первого датчика положений и входом второго концевого переключателя, первый концевой переключатель соединен с входом третьего привода линейного перемещения и через диоды развязки с входом третьего кониевого переключателя и выходом восьмой схемы совпадения,, второй конечный переключатель выходами соединен с третьим приводом линейного перемещения и вторым входом восьмой схемы совпадения, первый вход которой соединен с выходом датчика перпендикулярного положения и через диодные развязки с входом формирователя команд Пуск-останов, блоком управления тяговым электродвигателем, с входом четвертого концевого переключателя, входом пятого концевого переключателя и выходами шестого, пятого и третьего концевых переключателей, другие выходы которых соответственно соединены с входами первого, третьего и четвертого приводов линейных перемещений, причем к другому входу последнего через четвертый конечный переключатель подключены выход шестой схемы совпадений и вторые входы третьей и девятой схемы совпадений, к первым входам которых соответственно подключены третий и четвертый датчики положений, при этом выход девятой схемы совпадений соединен с блоком формирования команд Пуск-останов, а третий датчик положения подключен к первому входу десятой схемы совпадений, соединенной вторым входом с формирователем режимов и блоком уп-- равления тяговым двигателем, а выходом - с вторым входом седьмой схемы совпадения.
i
вход формирователя режимов, выход вто-
0
5
вход формирователя режимов, выход вто-
0
5
0
5
0
5
рой схемы совпадений через диоды развязки соединен с входом второго привода линейного перемещения и выходом седьмой схемы совпадений, первый вход которой соединен с выходом первого датчика положений и входом второго концевого переключателя, первый концевой переключатель соединен с входом третьего привода линейного перемещения и через диоды развязки с входом третьего кониевого переключателя и выходом восьмой схемы совпадения,, второй конечный переключатель выходами соединен с третьим приводом линейного перемещения и вторым входом восьмой схемы совпадения, первый вход которой соединен с выходом датчика перпендикулярного положения и через диодные развязки с входом формирователя команд Пуск-останов, блоком управления тяговым электродвигателем, с входом четвертого концевого переключателя, входом пятого концевого переключателя и выходами шестого, пятого и третьего концевых переключателей, другие выходы которых соответственно соединены с входами первого, третьего и четвертого приводов линейных перемещений, причем к другому входу последнего через четвертый конечный переключатель подключены выход шестой схемы совпадений и вторые входы третьей и девятой схемы совпадений, к первым входам которых соответственно подключены третий и четвертый датчики положений, при этом выход девятой схемы совпадений соединен с блоком формирования команд Пуск-останов, а третий датчик положения подключен к первому входу десятой схемы совпадений, соединенной вторым входом с формирователем режимов и блоком уп-- равления тяговым двигателем, а выходом - с вторым входом седьмой схемы совпадения.
i
91543524
ложений установлены на штангах, кине- 3. Система по п.1, отличаю- матически связанных с приводами ли- щ а я с я тем, что транспортные нейных перемещений и концевыми пере- средства, подлежащие сцепке, снабжены ключателями.отражателями.
Редактор А. Огар
Составитель Н. Карев
Техред М. Ходанич Корректор М . Максимишинец
Заказ 407
Тираж 452
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г.Ужгород, ул. Гагарина,101
10
Подписное
