1
Изобретение относится к области автоматизации промышленности строительных материалов и предназначено для .использования при загрузке вагонеток с кирпичом в туннельные сушила и печи, а также при их разгрузке.
Известно устройство для автоматического адресования подвижных объектов , содержащее датчик положения подвижных объектов, задающий переключатель с магнитоуйравляемыми контактаtm, равномерно расположенными и радиально ориентированными на неподвижной круговой плате в электрической схемы, содержащей две параллельно подключенных к источнику питания цепи, каждая из которых образована реле и упомянутыми контактами flj .Недостатком указанного устройства является его сложность,
Наиболее близким техническим решением к данному изобретению является устройство для точного адресования передаточной тележки, содержащее коммутатор кангшов, соответствующие входы которого через датчики отправления тележки и беспроводные каналы связи соединены с формирователями команд на отправление, а выходы через усилители мощности и блок программного разгонас двигателем тележки, снабженным тормозом, формирователи команд на останов, блок реализации останова, включающий в себя датчик отключения, вход которого беспроводным кана.гом связи соединен с формировате.пем ко., мд на останов, блоки памяти направления движения 2j.
Недостатком известного устроПства для точного адресования передаточной тележки является невысокая точность остановов тележки при колебательр.ых движениях около места останова, а; также наличие болыдого количества элементов в блоке останова и большое количество датчиков, что приводит к усложнению конструкции устройства и в конечном счете к снижению надежности его работы.
Целью настоящего изобретения является повышение точности и надежности Б работе устройства.
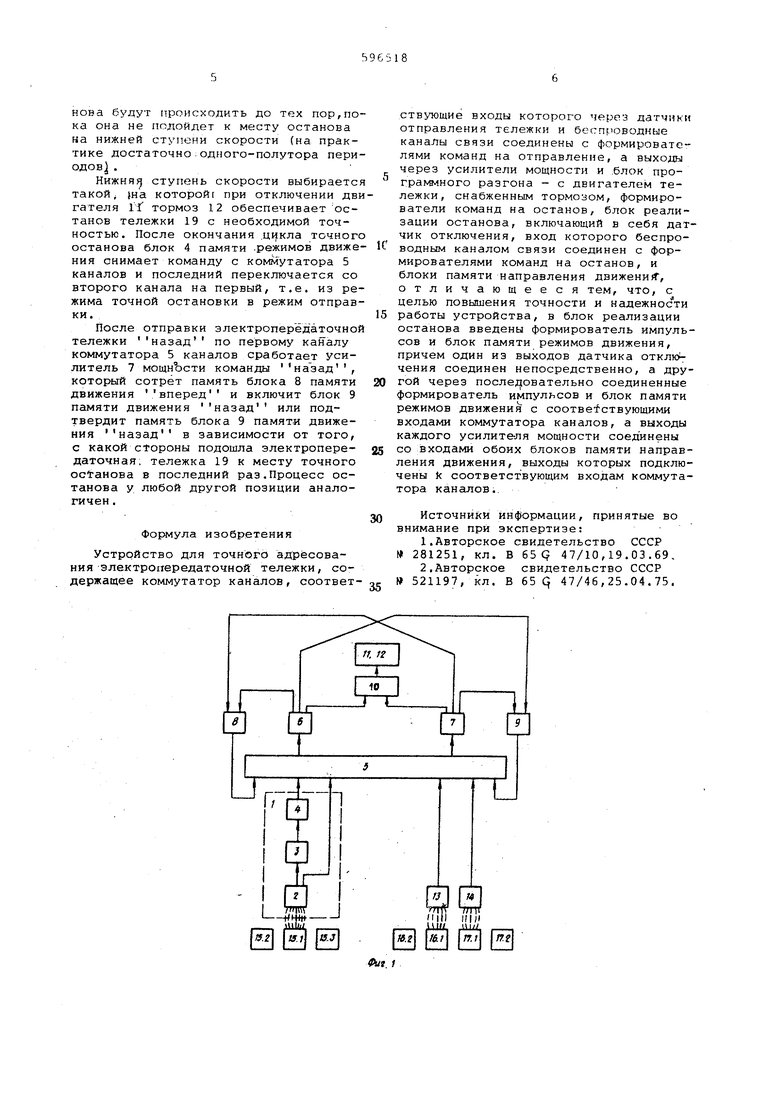
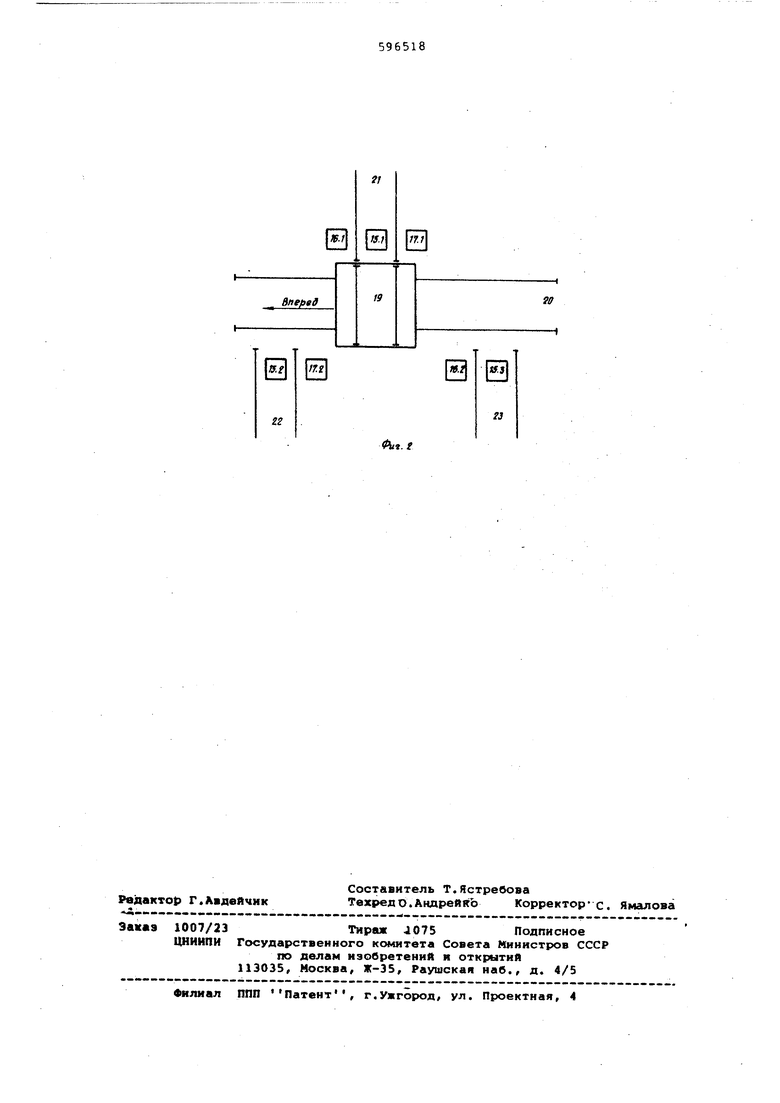
Поставленная цель достигается тем, что в бпок реализации останова введены фог щрователь импульсов и блок памяти режимов движения, причем один из выходов датчика отк.пючения соединен непосредственно, а другой через последовательно соединенные формирователь импульсов и блок памяти режимов двкжения с соответствующими входами коммутатора каналов, а выходы каждого усилителя мощности соединены со входами обоих блоков памяти направления движе ния, выходы которых подключены к.соответствующим входам коммутатора каналов . На фиг.1 представлена блок-схема устройства.. На фиг.2 показана технологическая схема движения электропередаточной тележки и места установки формирователей команд отправления и точной остановки . Устройство состоит из блока 1 реализации останова, в который входят датчики 2 отключения, формирователь 3 импульсов и блок 4 памяти режимов движения, коммутатор 5 каналов, усили теля 6 мощности команды вперел, усилителя 7 мощности команды назад блока 8 памяти движения вперед,бл ка 9 памяти движения Назад, блока 10 программного разгона, двигателя 11 с тормозом 12, датчиков 13 и 14 отправления соответственно .вперед и назад, формиров,ателей lSi,l5l2, 15.3 командна останов, формирователей 16.1.16.2команд на отправку вперед и формирователей 17.1,17.2 команд на отправку назад,Все упомянутые эле менты и блоки, за исключением формирователей 16.1,16.2,17.1,17.2 команд на отправление и формирователей 15.1, 15.2.15.3команд на останов, установлены на электропередаточной тележке 19, которая движется по рельсам 20 и с исходной позиции 21 развозит вагонетки с кирпичом к печам на адресные позиции 22,23. На исходной позиции 21 расположены формирователь 15.1 команд на останов и формирователи 16.1 17.1 команд на отправку, а на адресных позициях 22,23 соответственно фор мирователи 15.2, 15.3 команд на останов и формировйтейй 17.2 и 16.2 коман на отправку (с позиций 22,23 тележка 19 движется только к позиции 21, т.е всегда в одном и том же направлении для каждой позиции). Работу устройства можно рассмотреть при движении тележки 19 с исход ной позиции 21 к адресной позиции 22 Формирователь 16.1 команд на отправк 13 отправки вперед и через первы канал коммутатора 5 каналов, в котором команда датчика 13 отправки вп ред запоминается и усилитель 6 мощ ности команды -вперед включает блок 10 программного разгона. При этом команда усилителя 6 мощности за поминается блоком 8 памяти движения вперед. Двигатель 11 набирает ск рость. На максимальной скорости теле ка 19 подходит к позиции 22,При этом формирователь 15.2 соманд на осганов включает латчик 2 Ои-глючения. Первый выход летчика 2 отключения воздействует непосредственно на коммутатор 5 каналов таким образом, что отключает выход по ;ле1шего. Двигатель .11 отключается, а тормоз .12 включается. Одновременно второй выход датчика 2 отключения через формирователь 3 импульсов, который выдает кратковременный импульс при каждом срабатывании датчика 2 отключения,и блок 4памяти режимов движения переключает коммутатор 5 каналов с первого канала на второй, т.е. из режима отправки в режим точной остановки. Однако, пока датчик 2 отключения включен, выход коммутатора 5 каналов заперт. Электропередаточная тележка 19, которая двигалась с максимальной скоростью, проскочит по инерции место точного останова у позиции 22 и датчик 2 отключения выйдет из зоны действия формирователя 15,2 команд на останов,однако, команда датчика 2 отключения через формирователь 3 импульсов запомнится блоком 4 памяти режимов движения. Выход коммутатора 5 каналов вновь откроется, причем блок 8 памяти движения вперед, который помнил направление первоначального движения,через второй канал коммутатора 5 каналов и усилитель 7 мощности команды назад включает блок 10 программного разгона. Одновременно команда усилителя 7 мощности стирает память движения вперед, воздействуя на блок 8 памяти движения вперед и, запоминается блоком 9 памяти движения Двигатель 11 тормозится противовключением и начинает вращение в противоположном направлении, набирая скорость по команде блока 10 программного разгона. Программа пуска двигателя 11 выбрана такой, чтобы на участке выбега после максимальной скорости двигатель 11 не успел разогнаться до максимальной скорости. В результате этого тележка 19 подойдет к месту требуемого останова с другой стороны и на меньшей скорости. Далее происходит процесс, описанньй выше с той лишь разни цей, что при повторном срабатывании датчика 2 отключения коммутатор 5 каналов не будет переключаться с первого канала на второй, ибо это переключение уже произощло при первом сраба,тывании датчика 2 отключения и поскольку электропередаточная тележка 19 двигалась назад, то теперь через блок 9 памяти движения назад коммутатор 5 каналов, усилитель 6 мощности команды вперед и блок 10 программного разгона, в двигатель 11 вновь изменит направление вращения. Затухающие колебания движения электропередаточной тележки 19 около места требуемого останова будут происходить до тех пор,по ка она не подойдет к месту останова на нижней ступени скорости (на практике достаточно:одного-полутора пери одов , Нижня ступень скорости выбираетс такой; |на которойг при отключении дви гателя Г тормоз 12 обеспечивает останов тележки 19 с необходимой точностью. После окончания .цикла точного останова блок 4 памяти .режимов двизке ния снимает команду с коммутатора 5 каналов и последний переключается со второго канала на первый, т.е. из режима точной остановки в режим отправки. После отправки электроперед аточной тележки назад по первому каналу коммутатора 5 каналов сработает усилитель 7 мощнЪсти команды назад, который сотрет память блока 8 памяти движения вперед и включит блок 9 памяти движения назад или подтвердит память блока 9 памяти движес какой стороны подошла электропередаточная, тележка 19 к месту точного octaHOBa в последний раз.Процесс останова у любой другой позиции аналогичен . Формула изобретения Устройство для точного адресования электроиередаточной тележки, содержащее коммутатор каналов, соответствующие входы которого через датчики отправления тележки и беспроводнЕ 1е каналы связи соединены с формирователями команд на отправление, а выходы через усилители мощности и .блок проrpaNWHoro разгона - с двигателем тележки, снабженнЕз1м тормозом, формирователи команд на останов, блок реализации останова, включающий в себя датчик отключения, вход которого беспроводным каналом связи соединен с формирователями команд на останов, и блоки памяти направления движени Г, отличающееся тем, что, с целью повышения точности и надежносгти работы устройства, в блок реализации останова введены формирователь импульсов и блок памяти режимов движения, причем один из выходов датчика отклк чения соединен непосредственно, а другой через послед овательно соединенные формирователь импульсов и блок памяти режимов движения с соответствующими входами коммутатора каналов, а выходы каждого усилителя мощности соединены со входами обоих блоков памяти направления движения, выходы которых подключены k соответствующим входам коммутатора каналов. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР 281251, кл. В 65 Q 47/10,19.03.69, 2.Авторское свидетельство СССР 521197, кл. В 65 q 47/46,25.04.75.
Вперед
90
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для точного адресования передаточной тележки | 1978 |
|
SU747789A1 |
| Устройство для точного адресования передаточной тележки | 1975 |
|
SU521197A1 |
| Устройство для адресования транспортного средства | 1987 |
|
SU1618706A1 |
| Автоматизированная поточная линия подачи запарочных вагонеток | 1985 |
|
SU1291421A1 |
| Устройство программного адресования транспортного средства | 1983 |
|
SU1113337A1 |
| Устройство управления приводами тягового органа и напольного ролика для цикловых перемещений материалов | 1987 |
|
SU1562246A1 |
| Устройство для управления движением транспортного средства | 1986 |
|
SU1317401A1 |
| Устройство для автоматического адресования объекта | 1975 |
|
SU640915A1 |
| Устройство для управления движением транспортного средства | 1989 |
|
SU1735809A2 |
| Устройство для подачи и точного останова лесоматериалов на раскряжевочных установках | 1987 |
|
SU1451012A1 |
гг
гз
