(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЬМИ
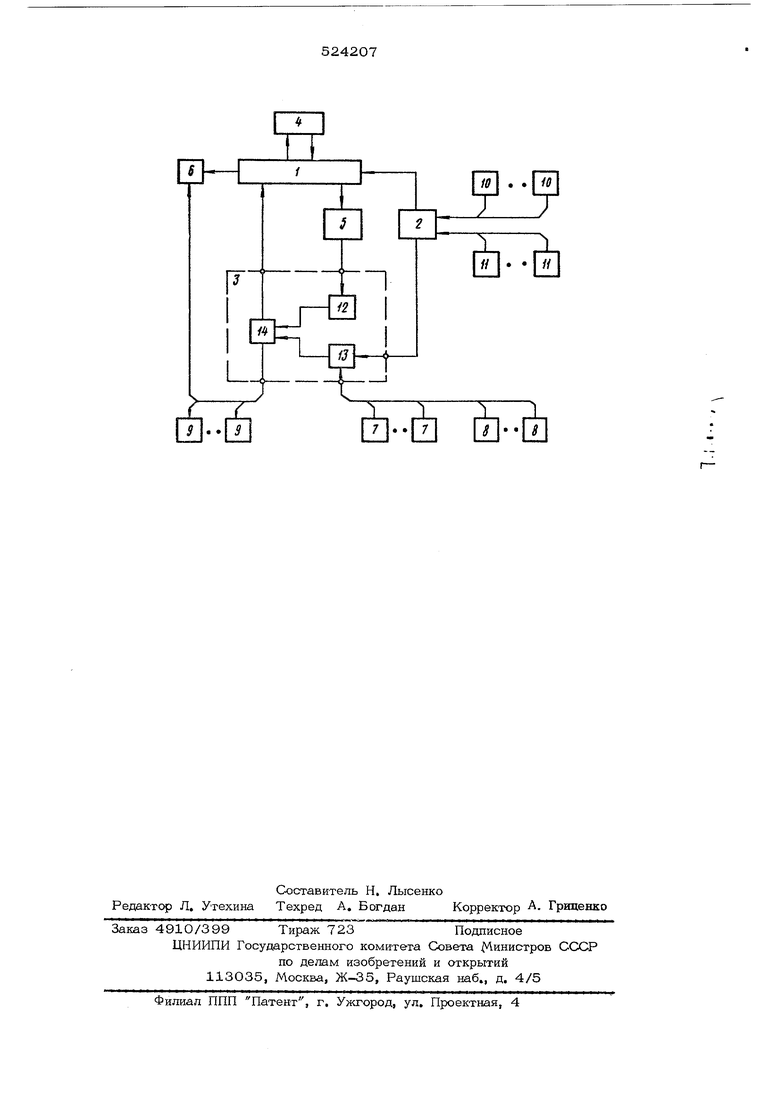
СРЕДСТВАМИ Эта цель достигается введением в пред ложенное устройство блока расчета параме ров управления, арифметического блока, сч чика заданных параметров управления, сче чика фактических параметров управления, полнительных блоков передачи информации, дополнительных датчиков учета транспортных средств. Дополнительные блоки пере дачи информации соединены с входом блока прие.а информации, второй выход которого подключен к первому входу счетчика фактических параметров управления, второй вход которого соединен с датчиками учета транспортных средств, а выход - с первым входом арифметического блока, Второй вхо которого через счетчик заданных параметров управления подключен к выходу блока распределения параметров управления. Оди выход арифметического блока соединен со вторым входом блока ввода информации, подключенного к блоку расчета параметров управления, а другой - со входами светофоров и мнемосхемы. На чертеже изображена блок-cxeivia пред ложенного устройства. Устройство содержит блок ввода информации 1, блок приема информации 2, анали затор процесса управления 3, блок расчета параметров управления 4, блок распределения параметров управления 5, мнемосхему 6, датчики учета транспортных средств 7 н 8, светофоры 9, блоки передачи информации 10 о режиме загрузки транспортных средств, блоки передачи информации 11 о режиме разгрузки транспортных средств. Блок ввода информации 1 включает пуль оператора, блок оперативной памяти и устройство ввода в ЭВМ и служит для ввода и гзапоминания параметров: средних значений времени движения порожних и гружен 1ь;х самосвалов по перегонам, числа и производительности забоев за смену числа и производительности отвалов за смену; числа и грузоподъемности автосамосвалов за смену; количества подготовленной к выемке горной массы в каждом забое, остаточной емкости каждого отвала (места перевозимой горной массы). Блок расчета параметров управления 4 реализует алгоритм: n ) (-пор) n (отпв) (гр) Птг-Г. +Е-П. Г. , -пор. гр i«l i 1 необходимое число автосамосвалов; -nop- г. то же для порожнякового и гру зового направлений; tiaff) (otn) среднее значение интенсивности Tli ,n. движения на 4 -ом перегоне, (самосвалов в час) (1, 2, 3, ..м тп ); Спор) up) - среднее значение времени движения транспорта в порожняковом и грузовом направлениях по 4 -му перегону (час). Блок распределения параметров управлег1ия 5 реализует алгоритмы. N - S ti 1 in расчетное необходимое число самосвалов на J -ом огветвлении; i {1, 2, 3.,, тп ); среднее значение интенсивности движения на д -ом перегоне j го ответвления, самосвалов в час: среднее значение времени движения транспорта в порожняковом (или грузовом:) направлении по I -му перегону 3 -го ответвления. Анализатор процесса управления 3 содержит блоки счетчиков заданных 1.2 н фактических 13 параметров управления, выходы которых подключены к арифметическому блоку 14, и реализует Функцию управления движением автотранспорта по отклонению фактических параметров управления. По назначению счетчики 12 и 13 подразделяются на два типа. Счетчики первого типа контролируют заполнение ответвлений порожним транспортом, счетчики второго типа - заполнение ответвлений груженьгм транспортом. Арифметический блок 14 ъы читанием определяет для каждого ответвления знак и величину отклонения фактических параметров распределения от расчетных. Датчики 7 различают прохождение порожних, а датчики 8 - груженых самосвалов, например, по генерируемой ими частоте, которая изменяется при загрузке и разгрузке, и размещены в начале каждого ответвления рядом с соответствующими светофорами 9. Светофоры выполнены в виде стрелки, указывающей разрещениое lianpaBneHHe движения транспорта. При сложных комплексах светофоры грузового направления должны иметь другой цвет, например синий. Блоки передачи информации о разгрузке самосвалов 10 установлены на отвалах и передают номера самосвалов после их разгрузки. Блок ввода информации 1, блок приема информации 2, блок распределения параметров управления 5, анализатор 3, мнемосхема 6 и блок расчета параметров управлени 4 размещены на вычислительном центре, Устройство работает следующим 1бразо Перед началом работы в блок ввода информации 1 заносятся йсходнью данные экс хаваторно-автолюбильного комплекса. По получении сменного наряда в бхюк. 1 вводятся дополнительные данные о количественном составе оборудования комплекса. При наличии изменений в условиях работы на 1ювую омену, вся инфop aция вмеоте с новыми данными поступает в блок рас чета параметров управления. 4 в котором по известному алгоритму определяются мак симальная и минимальная потребности в транспорте, исходя из условий работы толь ко ближних или только дальних отвалов. Полученные значения в блоке 4 сравнква-ются с фактическим количеством выделен- ного транспорга, При Нф : (лд(.,- необходимо ввест в комплекс новые забои или вывести часть автосамосвалов, а зат-ем производить перерасчет. При N следует вывести в резерв часть забоев и вновь делать пере расчет. Расчет закончен, если N,,, Н N и в резерве имеется один или два аабоя с расчитанной потребностью в гранспорте. При выборе вариантов в блок может аано- ситься и информация о дри-оритеткости. После выбора оптимального сочетания числа забоев, количества транспорта и производительности отва,лов из блока 4- в блок 1 поступает информация о допустимых пре делах регулирования: -& N-N ftft м м ср Н Предел регулирования при дефиците автосамосва.чов; то же при 1:збыточности автосамосвалов; потенциальная потребность резервного забоя в транспорте « Затем из блока 1 в блох распределения параметров управления 5 посгупает информация о заданном порядке распределения транспорта по о-тветвлениям. Все выбранные параметрь) управления комплексом од новременно фиксируются на мнемосхеме 6, В начале работы системы светофоры 9 открыты на всех бтвегвлениях, а от экскава-люров и отвалов через блок приема инфор мации 2 в блок i поступают cиг5iaлы гото ности. По мере поступления транспорта в разрез датчики 7 на входном посту и на ответвлениях к экскаваторам фиксируют прохождение порожнего транспорта и заполняют импульсами соответствующие реверсивные счетчики 1-3 первого типа. Как только в каком-либо счетчике 13 число импульсов соответствующее числу самосвалов на контролируемом ответвлении, достигает заданного значения, выходным сигналом блока 1,4 закрывается соотвегствующий светофор 9, и запрещается въезд послед ющих самосвалов на контролируемое ответвление. По мере загрузки самосвалов в забоях данного ответ- вления от экскаватора через соответствуюш.ий бяок передачи информации 1О и блок приема информации 2 в реверсивный счет- чкк 13 первого типа поступает сигнал на вычитание. При этом выходным сигналом блока 14 вновь открывается светофор 9 и разрешается въезд одного самосвала. По мере разгрузки самосвалов на отвалах сигналами от бло14а 11 через блок приема информации 2 а соответствующие счетчики 13 первого типа доба.аляю.тся по одному импульгсу« После первой разгрузки последнего самосвала устройство переходит на управление по замкнутой схеме. Ко по мере загрузки самосвалов в забоях сигналами от блоков 10 через блок 2 заполняются и счетчики 13 второго типа, контролирующие грузовые направления. Счетчики 13, контролируЮЩие ответвления к отвалам, заполняются сигналами от датчиков 8, Распределение груженых самосвалов по отвалам осуществляется аналогично распределению самосвалов по забоям. По мере разгрузки самосвалов на отвалах сигналами от блоков 11 из соответствующих счетчиков 13 второго типа вычитается по одному импульсу. Замкн тая схема управления размыкается при погрузке последнего самосвала,. Таким образом, каждый светофор открывается сигналами от экскаваторов или отвалов, находящихся в конце контролируемого ответвления, а закрывается сигналами датчика прохо/ ф,ения транспорта в начале ответвления, Работ-а всех светофоров дублируется на мнемосхеме 6« Из-за возмущений в процессе регулирования движения транспорта на отдельных перегонах и ответвлениях возникают отклонения, различающиеся по знаку и величине. Ухудщение погодных условий, увеличение производительности забоев, аварийность отвалов и транспорта вызывают дефицит транспорта -&Т1, а снижение производительности забоев его избыток + &-П - Значительный по величине избыток возникает при отказах забоев. Знаки и величины этих отклонений фиксируются арифметическим блоком 14 пу тем вычитания фактических нных распределения из заданных и вводятся в блок 1 для коррекции параметров управления. В блоке 1 сравниваются выявленные отклонения с допустимыми пределами регулирования, и если величины отклонений устойчивы то они в качестве поправок вводятся в бло распределения параметров управления 5. При отказе одного из забоев, сигнал о котором поступает в блок 1 через блоки 2 и соответствующий блок 10, в комплекс вводится резерв с одновременным вводом коррекции, но без проверки на устойчивость. Таким образом, критерием управления комплексом является равенство между необходимым и фактическим количествами автотранспорта в комплексе Кф потирИспользование Б предлагаемом устройстве анализатора процесса управления, блоков передачи информации о разгрузке самосвалов и датчиков учета груженого транспорта придает гибкость в управлении комплексом при воздействии всевозможных возмущений за счет обратной связи: анализатор процесса управления - блок ввода информации; позволяет сократить до минимума простои автотранспорта за счет автоматического регулирования движения порожнего транспорта и груженого транспорта. Наличие в устройстве блока расчета параметров управления блоков передачи инфор мации о разгрузке, датчиков 8 и светофоро делает его универсальным, т.е. позволяет применять для любой схемы развития автодорог на разрезе за счет предварительной комплектации объектов комплекса и установ ления пределов регулирования движения ав тотранспорта. Размещение светофоров на порожняковых и грузовых ответвлениях позволяет сократить мертвую зону регулирования транспорта до величины, пропорциональной дальгности одного перегона. Применение на автоатвалах блоков передачи информации о разгрузке самосвалов упрощает контроль за работой отвалов и учет выработки автосамосвалов (в тонноки- лометрах) посредством регистрации их номеров и календарного времени разгрузки при заранее измерен11ых длинах марщрутов. ормула изобретения Устройство для управления транспортными средствами, содержащее блок ввода информации, выходы которого соединены соответственно с входами блока распределения параметров управления и мнемосхемы, а первый вход через блок приема информации подключен к выходам блоков передаче информации, датчики учета транспортных средств и светофоры, отличающееся тем, Что, с целью повыщения эффективности работы устройства, в него введены блок расчета параметров управления, арифметический блок, счетчик заданных параметров управления, счетчик фактических параметров управления, дополнительные блоки передачи информации, дополнительные датчики учета транспортных средств; причем дополнительные блоки передачи информации соединены с входом блока приема информации, второй выход которого подключен к первому входу счетчика фактических параметров управления, второй вход которого соединен с датчиками учета транспортных средств, а выход - с первым входом арифметического блок,а, второй вход которого через счетчик заданных параметров управления подключен к выходу блока распределения параметров управления; один выход арифметического блока соединен со вторым входом блока ввода информации, подключенного к блоку расчета параметров управления, а другой - со входами светофоров и мнемосхемы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля и управления экскаваторно-автомобильным комплексом | 1978 |
|
SU748492A1 |
| Устройство для управления движе-НиЕМ АВТОТРАНСпОРТА | 1979 |
|
SU822229A1 |
| Устройство для обработки данных комплекса "карьер-обогатительная фабрика" | 1977 |
|
SU670949A1 |
| Способ строительства подземных сооружений метрополитена | 1990 |
|
SU1747610A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОГРУЗОЧНО-ТРАНСПОРТНЫМИ СРЕДСТВАМИ НА КАРЬЕРАХ ПРИ СЕЛЕКТИВНОЙ ВЫЕМКЕ РУД И СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ КАЧЕСТВОМ РУДОПОТОКА НА ОСНОВЕ ЭКСКАВАТОРНО-АВТОМОБИЛЬНОГО КОМПЛЕКСА | 1996 |
|
RU2100844C1 |
| Многоканальное устройство для управления движением транспортного средства | 1989 |
|
SU1702395A1 |
| Способ районирования экскаваторных забоев для управления работой экскаваторно-автомобильных комплексов | 2020 |
|
RU2738919C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕПРОИЗВОДИТЕЛЬНЫХ ПОТЕРЬ ЭЛЕКТРОЭНЕРГИИ ЭЛЕКТРОПОДВИЖНЫМ СОСТАВОМ ПРИ НАГОНЕ ГРАФИКОВОГО ВРЕМЕНИ С ИСПОЛЬЗОВАНИЕМ БОРТОВЫХ ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНЫХ КОМПЛЕКСОВ УЧЕТА ЭЛЕКТРОЭНЕРГИИ | 2015 |
|
RU2591558C1 |
| Устройство для передачи и приема информации о погрузочных и транспортных единицах | 1976 |
|
SU615520A1 |
| Устройство для обработки данных комплекса карьер-обогатительная фабрика | 1975 |
|
SU556451A1 |
«
/«
L.
/
z
ТТЛ
