(54) УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ
ЭКСКАВАТОРНО-АВТОМОБИЛЬВЫМ КОМПЛЕКСОМ
I
Изобретение относится к области контроля и управления транспортными средствами и может быть использовано для контроля и управления горнотранспортными работами на разрезах.
Известно устройство для )ттравленйя подвижными объектами, содержащее шифратор с частотно модулированным генератором и дешифратор, установленный на подвижном объекте, снабженный блоком селекции по нескольким кодовым признакам 1 .
Недостатком этого устройства являются малые функциональные возможности.
Наиболее близким к предлагаемому устройству по технической сущности является устройство, содержащее блок ввода информагдаи, подключенный к блоку приема информации, блоку расчета параметров управления, блоку распределения параметров управления .мнемосхеме и арифметическому блоку, который соединен с мнемосхемой, светофорами, блоком счетчиков заданных параметров, подключенным к блоку распределения параметров управления, и с блоком счетчиков фактических параметров
управления, который соединен с датчиками учета транспортных средств, и с блоком приема информации, подключенным к блокам передачи информации о погрузке и разгрузке транспортных средств 2.
Известное устройство не позволяет эффективно использовать транспортные и погрузочно-разгрузочные средства комплекса.
Целью изобретения является повышение эффективности использования оборудовашм экскаваторно-автомобильного комплекса, то есть расширение функциональных возможностей устройства.
Эта цель достигается тем, что в устройство введены блок задания ритма, блок контроля графика Погрузки и разгрузки и блок формирования маршрута, вьгходы датчиков учета транспортных средств блока распределения и второй выход блока приема информации подключены ко входам блока задания ритма,
20 выходы которого подключены ко вторым входам блока контроля графика погрузки и разгрузки и блока контроля графика движения транспортных средств, выход которого соединен с третьим входом блока ввода информации, второй выход блока приема информации подключен к первому входу блока контроля графика погрузки и разгрузки, выход которого соединен с четвертым входом блока ввода информации и вторым входом блока вычисления отклонений, выход которого подключен к первому входу блока формирования маршрута, соединенного вторым входом с выходом блока ввода информации, выход блока формирования маршрута подключен ко второму входу блока отображения информации и к светофорам.
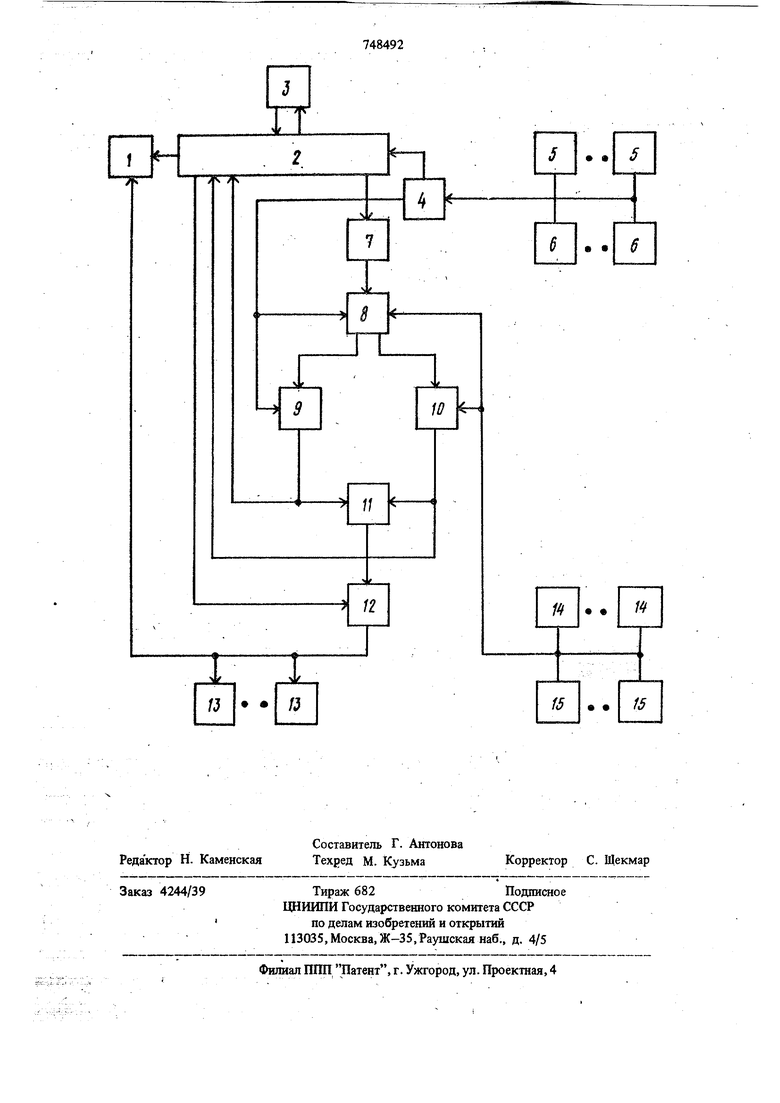
На чертеже представлена структурная схема устройства. Оно содержит блок 1 отображения информации, соединенный с блоком 2 ввода информации, который подключен к блоку 3 расчета параметров управления, блоку 4 прием информации, соединенному с блоками 5 и 6 передачи информации о погрузке и разгрузке транспортных средств. Блок 7 распределения соединен с блоком 2 ввода информации и с блоком 8 задания ритма, подключенным к блоку 4 приема информации, к блоку 9 контроля графика погрузки и разгрузки транспортных средств, который соединен с блоком 2 ввода информации и блоком 4 приема информации. Блок 10 контроля графика движения транспортных средств соединен с блоком 2 ввода информации, с блоком 8 задания ритма и блоком 11 вычисления отклонений, подключенным к блоку 9 контроля графика погрузки и разгрузки транспортных средств и к блоку 12 формирования маршрута, который соединен с блоком 1 отображения информации, блоком 2 ввода информации и светофорами 13. Датчики 14 и 15 учета транспортных средств подключены, к блоку 8 задания ритма и блоку 10 контроля графика движения транспортных средств.
Устройство работает следующим образом.
Перед началом работъ в блок 2 ввода информащш вводятся исходные Данные экскаваторно-автомобильного комплекса: количественный состав оборудования комплекса, средние значения времени движения порожних и груженых самосвалов по. перегонам, число и производительности забоев и пунктов разгрузки, количество подготовленной к выемке горной массы в каждом забое, установленная приоритетность забоев. По зтим данным, введенным в блок 3 расчета параметров управления из блока 2 ввода информации определяется оптимальный вариант распределения фактически имеющихся транспортных средств по кoнtjpoлиpyeмым ответвлениям. Эта информация через блок 2 информации поступает в блок 7 распределения, в котором по заданному распределению транспортных средств
средним значениям интенсивности движения транспортных средств и плановой производительности погрузки и разгрузки определяется требуемая частота их следования и частота погрузки и разгрузки для каждого из контролируемых ответвлений. Блок 8 задания ритма формирует импульсы, частота следования которых соответствует расчетной для каждого ответвления частоте следования транспортных
0 средств и частоте погрузки и разгрузки. В блок 12 формирования маршрута вводятся из блока 2 ввода информации средние значения интенсивности движения транспортных средств для каждого из контролируемых от
5 ветвлений и их приоритетность. На этом завершается подготовка устройства к работе.
По мере готовности к работе погрузочного оборудования блоки 5 передачи информации о погрз ке транспортных средств пере0 Дают сигналы готовности, которые воспринимаются блоком 4 приема информации и поступают в блок 2 ввода информации и в блок 8 задания ритма. При этом из блока 8 задания ритма на вычитающие входы соответствующих
5 реверсивных счетчиков блока 10 контроля графика движения транспортных средств с заданной частотой поступают импульсы, моделирующие плановый график движения транспортных средств. По мере поступления транспорт0 ных Ьредств в контролируемые ответвления, на суммйруюшие входы соответствующих реверсивных счетчиков блока 10 контроля графика движения транспортных средств поступают импульсы, формируемые датчиками 14
5 учета транспортных средств. Количество зтих импульсов соответствует числу автосамосвалов, поданных в каждое из контролируемых ответвлений, а частота их следования - фактическому графику движения транспортных
0 средств в ответвлении. Образующаяся в реверсивных счетчиках блока 10 контроля графика движения транспортных средств разность характеризует отклонение фактической интенсивности движения транспортных средств в
5 Данных ответвлениях от плановой.
Аналогичным образом работает блок 9 контроля графика погрузки и разгрузки. При зтом началом отсчета импульсов заданной частоты, поступающих из блока 8 задания
Q ритма на вычитаюоще входы соответствующих реверсивных счетчиков блока 9 контроля графика (югрузки и моделируюп1их плановый график погрузки, являются сигналы о первой погрузке, формируемые соответствующими блока:
ми 5 передачи информации о погрузке транспортных средств и принимаемые блоком 4 приема информации. Эти же блоки 5 формируют импульсы, поступающие на суммирующие входы соответствующих реверсивных счет шков блока 9. Частота их следования соответствует фактическому графику погрузки. Образующаяся в реверсивных счетчиках блока 9 разность характеризует отклонение фактического графика, погрузки от планового. Разность величины отклонения от графика подачи транспортных средств и величины отклонения от графика погрузки, определяемая блоком 11 вычисления отклонений, характеризует фактический уровень дефицита транспортных средств (превышение частоты погрузки над частотой подачи транспортных средств) в конт ролируемых ответвлениях. .В блоке 12 формирования маршрута вычисляются относительные значения уровня дефици та транспорта в контролируемых ответвлениях , путем деления абсолютных значений фактического дефицита на соответствуюшие им плановые значения интенсивности движения. Номер ответвления, где вычисленное значение максимально, определяет направление движения очередного автосамосвала. В случае равенства вычисленных блоком 12 формирования маршрута значений относительно уровня дефицита транспортных средств для двух и более ответвлений очередной автосамосвал направляется в ответвление с наибольшим при ритетом. При зтом только один из светофоров 13 указывает разрешенное направление движения (зеленый цвет), а все. остальные, соответствующие как заполненным ответвлениям с более низким уровнем дефицита, запре щают движение транспорта (красный цвет). Началом отсчета графика подачи транспортных средств на разгрузку являются первые сигналы датчиков 15 учета транспортных средс а началом отсчета графика разгрузки - первые сигналы о разгрузке транспортных средств формируемые блоками 6 передачи информации о разгрузке. Последующие сигналы тех же датчиков 15 формируют фактические графики движения транспортных средств на разгрузку и на графики их разгрузки. Значение .отклоне ний фактических графиков движения транспор ных средств, погрузки и разгрузки от плановых, формируемые блоками 9 и 10, поступаю также в блок 2 ввода информации, где контролируются суммарные отклонения. При превышении установленныхпределов блоком 4 производится перерасчет первоначальных значений параметров управления. Перерасчет производится также при выходе из строя погрузочно-разгрузочного оборудования, фиксируемом сигналами, передаваемыми соответствующими блоками 5 и 6 передачи информации о погрузке и разгрузке и принимаемымиблоком 4 приема информации. Все выбранные па 2.6 раметры управления фиксируются блоком 1 отображения информации. Экономическая эффективность от использования данного устройства определяется указанными выше его техническими преимуществами. Формула изобретения Устройство для контроля и управления экскаваторно-автомобильным комплексом, содержащее блок ввода информации, выходы которого соединены соответственно с входами блока расчета параметров управления, блока распределения и первым входом блока отображения информации, первый и второй входы блока ввода информации подключены соответственно к выходу блока расчета параметров управления и к первому выходу блока приема информации, вход которого соединен с блоками передачи информации, блок контроля графика движения транспортных средств, первый вход которого подключен к датчикам учета транспортных средств, а выход - к первому входу блока вычисления отклонений, и светофоры, отличающееся тем, что, с целью расширения функциональных возможностей устройства, в него введены блок задания ритма, блок контроля графика погрузки и разгрузки и блок формирования маршрута, выходы датчиков учета транспортных средств блока распределения и второй выход блока приема информащ1и подключены ко входам блока задания ритма, выходы которого подключены ко вторым входам блока контроля графика погрузки и разгрузки и блока контроля графика движения транспортных средств, выход которого соединен с третьим входом блока ввода информации, второй выход блока приема информации подключен к первому входу блока контроля графика погрузки и разгрузки, выход которого соединен с четвертым входом блока ввода информации и вторъгм входом блока вычисления отклонений, выход которого подключен к первому входу блока формирования маршрута, соединенного вторым входом с выходом блока ввода информации, выход блока формирования маршрута подключен ко второму входу блока отображения информации и к iсветофорам.;. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР If 147114, кл. G- 08 С 15/04, 1961. 2.Авторское свидетельство СССР N 524207, кл, G 07 С 5/10, 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления транспортными средствами | 1974 |
|
SU524207A1 |
| Многоканальное устройство для управления движением транспортного средства | 1989 |
|
SU1702395A1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ СОРТИРОВОЧНЫХ СТАНЦИЙ НАПРАВЛЕНИЯ ЖЕЛЕЗНОДОРОЖНОЙ СЕТИ | 2012 |
|
RU2500558C1 |
| Устройство задания маршрута движения рельсовым транспортным средствам к местам загрузки | 1982 |
|
SU1088979A1 |
| Способ управления технологическим процессом железнодорожной станции | 2020 |
|
RU2738779C1 |
| Устройство для управления транспортными средствами | 1978 |
|
SU734727A1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113013C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2518670C2 |
| Устройство задания маршрута тран-СпОРТНыМ СРЕдСТВАМ K MECTAM пОгРуз-Ки | 1978 |
|
SU796035A1 |
| Устройство для управления движе-НиЕМ АВТОТРАНСпОРТА | 1979 |
|
SU822229A1 |