(54) М А НИПУЛ ЯТОР
жёстко связанной с гайкой 21, установлен-, ной на ходовом винте 16.
Манипулятор работает следующим образом.
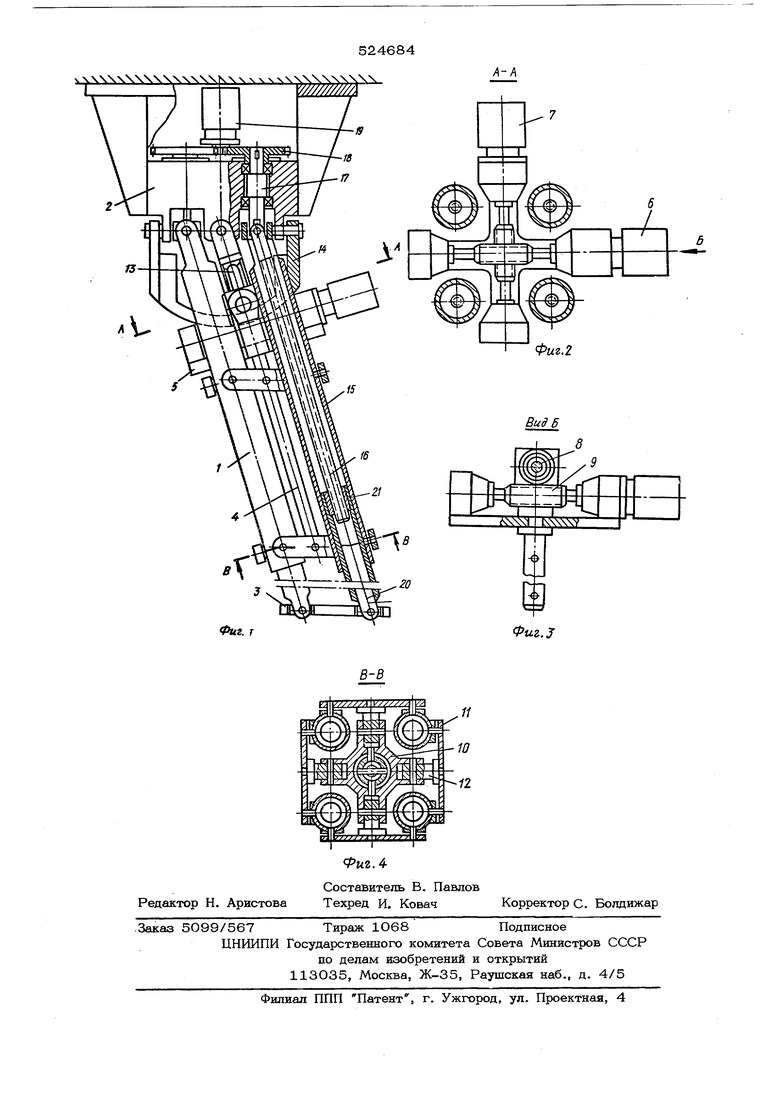
При включении привода 19 перемещения телескопических стержней вращение через зубчатые передачи 18 и валы 17 передается на ходовые винты 16 которые перемещают в трубчатых направляющих 15 гайки 21 с полыми штангами 20. Поскольку телескопические стержни 1 полностью идентичны и приводятся в действие общим приводом 19, то фланец 3 перемешается параллельно самому себе.
При работе привода 6 червяк 8 обкатыва ется вокруг зубчатого сектора 13, вместе с червяком 8 перемещается крестовина 5 с центральным стержнем 4, усилие от которого через щарнирные корпуса 1О, стойки 12 и серьги 11 передается на телескопические стержни 1, которые поворачиваются относительно основания 2.
Аналогично, при вращении червяка 9 приводом 7 крестовина 5 с центральным стержнем 4 обкатьгоается вокруг зубчатого секто- ра 14. В результате четыре телескопических стержня 1 поворачиваются относительно основания 2, всегда обеспечивая, таким образом, при работе приводов плоскопараллельный перенос рабочего органа.
Формула изобретения
1.Манипулятор, содержащий шарнирно связанное с основанием звено, имеющее привод, и кинематически связанный с этим звеном рабочий орган, отличающийся тем, что, с целью расщнрения технологичеоких возможностей путем обеспечения плоскопараллельного движения рабочего органа в пространстве, указанное звено выполнено в вице стержней, соединенных между собой щарнирными параллелограммами.
2.Манипулятор поп. 1,отлича и и с я тем, что звено содержит телескопические стержни.
3.Манипулятор по пп.1 и 2, отличающийся тем, что каждый телескопический стержень кинематически соединен
с приводом указанного звена.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1974 |
|
SU503710A1 |
| Делительное устройство | 1982 |
|
SU1052368A1 |
| Манипулятор агрегатного типа | 1985 |
|
SU1293014A1 |
| Захватное устройство | 1986 |
|
SU1421530A1 |
| Металлорежущий станок с ЧПУ | 1983 |
|
SU1138261A1 |
| Манипулятор | 1986 |
|
SU1351782A1 |
| Устройство для уборки просыпи под конвейером | 1983 |
|
SU1159848A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Модуль исполнительного органа манипулятора | 1985 |
|
SU1301689A1 |
| Манипулятор | 1981 |
|
SU973350A1 |