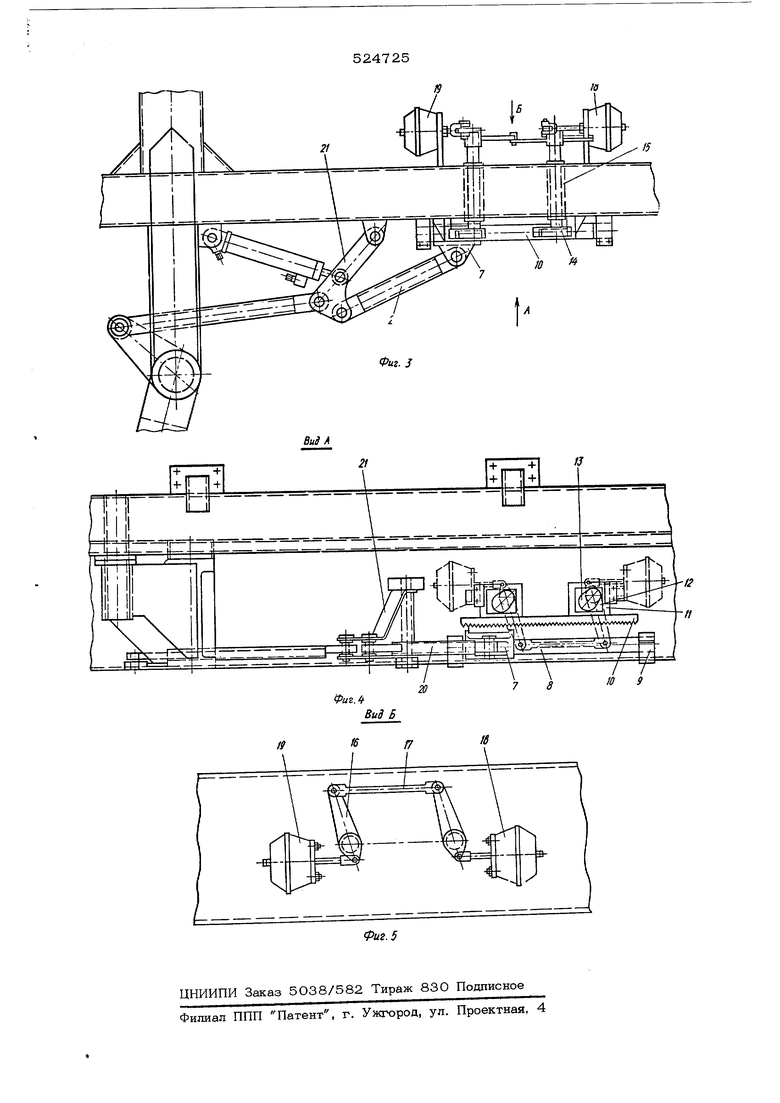
зацеплении с зубьями рейки 1О. К концам рейки 10 жестко прикреплены две бобышки 11, которые с помощью окон 12 взаимодействуют с эксцентриками 13, Эксцентрики находятся на внешних концах валов 14 и жест- ко соединены о ними. Валы могут ловорачи- ваться в подшипниках 15, которые установлены в лонжероне рамы. К внутренним концам валов 14 жестко прикреплены двуплечие рычаги 16. Нижние плечи рычагов шарнирно связаны между собой тягой 17, а верхние плечи рычагов шарнирно соединены со штоками пневмокамер 18 и 19 одностороннего действия. Ползун 7 с помощью тяги 2 О шарнирно соединен с двуплечим рычагом 21 механизма перемещения грузовой балки. Пульт управления механи мами фиксации обеих грузовых балок установлен на раме полуприцепа или в кабине тягача. Для установки грузовой балки механизмом перемещения под требуемый типоразмер блока необходимо предварительно ее расфиксировать. Для этого с пульта управления в пне вмокамеру 19 по трубопроводам подается под давлением воздух. При этом пневмока- мера 18 сообщается с атмосферой. При выдвижении штока пневмокамеры 19 валы 14 и эксцентрики 13 поворачиваются по часовой стрелке и поднимают рейку 10, освобож дая ползун 7. По окончании поворота грузовой балки необходимо ползун застопорить опусканием рейки 10. Для этого необходимо впустить сжатый воздух в пневмокамеру 18, одновременно пневмокамеру 19 сообщить с атмосферой. При этом эксцентрики 13 поворачиваются против часовой стрелки и прижимают рейку 10 к зубьям ползуна 7. Застопоренный ползун посредством тяги 20 предотвра &
4
2
J иг. 2 щает поворот рычага 21 механизма перемещения, этим самым фиксируя грузовую балку. Фиксирование второй грузовой балки осуществляется аналогично описанному своим механизмом. Наличие зубьев у ползуна 7 и рейки 10 с мелким щагом позволяет иметь большое количество фиксированных положений грузовых балок, что дает возможность увеличить номенклатуру перевозимых блоков по ширине. Управление работой пневмокамер осуществляется с одного места - пульта управления. Формула изобретения Полуприцеп для перевозки объемных железобетонных изделий, содержащий раму, раздвижную в ширину грузовую платформу с грузовыми балками, механизм перемещения с двуплечим рычагом и механизм фиксации грузовых балок, отличающийся тем, что, с целью автоматического фиксирования грузовых балок в требуемом положении, на раме полуприцепа закреплены пневматические камеры, а механизм фиксации каждой грузовой балки состоит из ползуна с зубьями, шарнирно соединенного с двуплечим рычагом механизма перемещения и подвижно установленного на щтанге, закрехьленной посредством кронштейна на раме, и зубчатой рейки, взаимодействующей с ползуном и подвешенной через эксцентрики на внешних концах валов, установленных в подшипниках, при этом противоположные концы валов через рычажный механизм соединены со штоками пневматических камер.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод грузовой балки полуприцепаблоковоза | 1973 |
|
SU546515A1 |
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| Устройство для сборки покрышек пневматических шин | 1979 |
|
SU788570A1 |
| Способ управления поворотом полуприцепа с блокируемой тележкой и устройство для его осуществления | 1980 |
|
SU925726A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ БУКСИРОВКИ АВАРИЙНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2081765C1 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КОНТЕЙНЕРОВ | 2003 |
|
RU2288885C2 |
| Устройство для переключения транспортных трубопроводов с одной магистрали на другую | 1978 |
|
SU765150A1 |