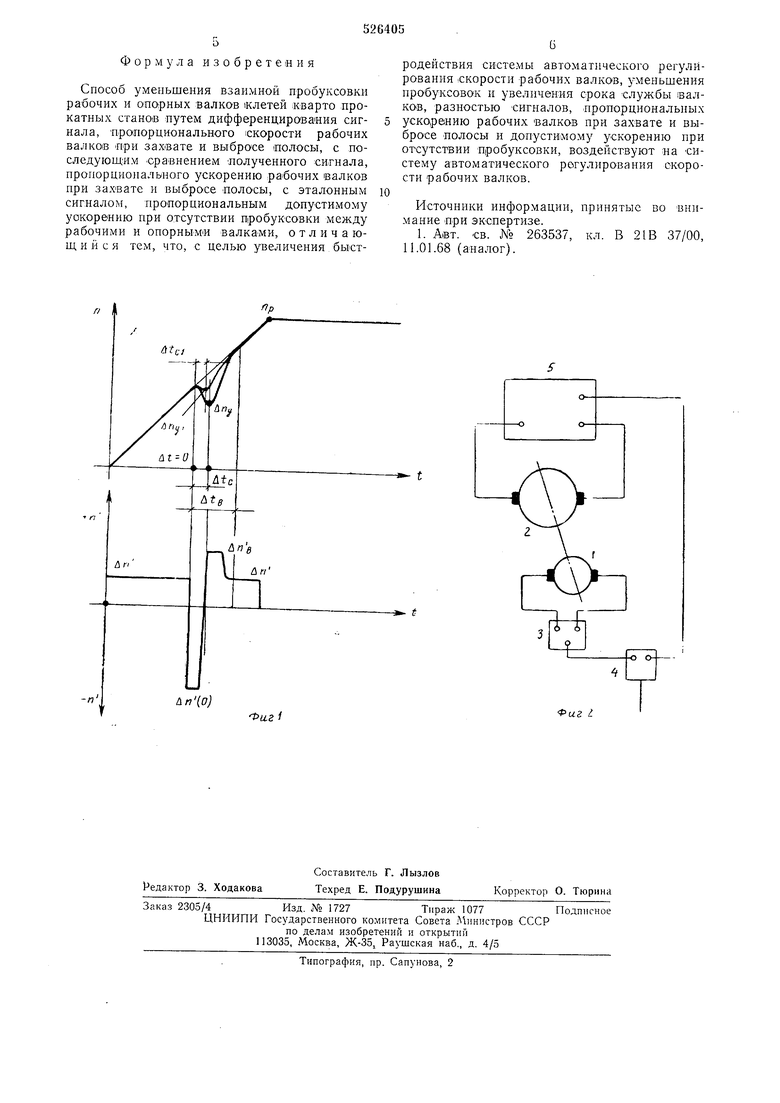
где Э - суммарный момент инерции на валу электродвигателя. На фиг. 1 показано также изменение (динамическое падение) Ang скорости, связанное с 5 режимом приложения ударной нагрузки ДМс к валу электродвигателя при захвате полосы валками. Величина динамического падения скорости Mg определится из соотношения:10 ,1 где Ate -время достижения скоростью двигателя значения Ang, отсчитываемое от начала приложения ударной нагрузки, при 0. Обш.ее время восстановления скорости в среднем обычно равно: Д/,;(3-4)Л/,. При захвате полосы на участке падения сщрости (от момента времени до А/ ) происходит юзнокольжение продолжающего вращаться по инерции опорного валка относительно понизившего свою скорость рабочего валка. При этом лыска образуется на рабочем валке. На участке восстановления скорости, т. е. за время t Atb-А с, происходит буксование рабочего валка относительно опорного, и лыска образуется на опорном валке. Поскольку ускорения Ап(О) и An наиравлены Встречно, то на участке падения скорости скольжения (юз) опорного валка относительно рабочего будет иметь место при соотношении:M(Q)2An,(5) а на участке восстановления скорости буксование рабочего валка отнооительно опорного имеет место при соотношении: ,,(6) где А/гь - .наибольшее ускорение на участке восстановления скорости (ускорения Апь и An лаправлены согласно) . При заданном диаметре рабочего вала величи1на пути скольжения (юза) опорного валка о рабочий равна: Величина пути буксования рабочего валка относительно опорного (равна: с.7гОр. 40 Как видно из выражений (7) и (8), величина взаимной пробуксовии валков (и пропорциональные им размеры лысок на валках), на основании выражений (3) и (4), соответственно будут равны: ДМ. . с f. , Дуи, . ,. i-o ss: -:-L n. Известно, что время At и частота среза (Вер системы авторегулирования связаны соотношением:В таком случае, значения Lp и LO, на основании выражений (9), (10) |И (И) будут равны:J--D, Как видно из выражений (12) и (13), чем выше быстродействие системы регулирования, т. е. чем выше соср, тем меньше (в квадрате) путь взаимной «пробуксовки валков, тем меньше величина лысок на валках. Отметим, что при 1выбросе полосы сначала образуется лыска на опорном валке - вследствие буксования относительно него рабочего валка, а затем - лыюка на рабочем валке- вследствие юза, т. е. скольжения опорного валка относительно рабочего. Устройство, реализующее предлагаемый способ уменьшения взаимной пробуксовки, содержит тахогенератор 1, вал которого соединен с валом прокатного электродвигателя 2. К тахогенератору 1 подключен дифференциатор 3, выход которого сравнивается с эталонным сигналом 4, пропорциональным допустимому ускорению при отсутствии взаимной пробуксовки между рабочими и опорными валками. Разность выходных напряжений дифференциатора 3 и эталонного сигнала 4 подключена ко входу системы авторегулирования скорости 5 прокатного электродвигателя 2 с целью повышения ее быстродействия при захвате и выбросе полосы. При этом динамическое падение скорости и время достижения этой величины отклонения скорости соответственно уменьшаются до значений Д%1 и Таким образом, предлагаемый способ позволяет увеличить быстродействие системы автоматического регулирования скорости рабочих валков, уменьшить взаимные пробуксовки рабочих и опорных валков и существенно увеличить срок их службы.
Формула изобретения
Способ уменьшения взаимной пробуксовки рабочих и опорных валков клетей «варто прокатных станое путем дифференцирования сигнала, прапорционального скорости рабочих валков при saxiBaTe и выбросе полосы, с последующим -сравнением лолученного сигнала, пропорционального ускорению рабочих валков при захвате и выбросе полосы, с эталонным сигналом, пропорциональным допустимому ускорению при отсутствии пробуксовки между рабочими и опорными валками, отличаюш, и и с я тем, что, с целью увеличения быстО
родействия системы автоматического регулирования скорости рабочих валков, уменьшения пробуксовок и увеличения срока службы валков, разностью сигналов, пропорциональных уско,рению рабочих валков при захвате и выбросе полосы и допустимому ускорению при отсутствии пробуксовки, воздействуют на систему автоматического регулирования скорости рабочих валков.
Источники информации, принятые во внимание при экспертизе.
1. Авт. св. № 263537, кл. В 21В 37/00, 11.01.68 (аналог).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ уменьшения взаимных пробуксовок рабочих и опорных валков прокатного стана | 1980 |
|
SU921648A1 |
| Устройство для уменьшения пробуксовок между рабочими и опорными валками листовых станов | 1980 |
|
SU937069A1 |
| Устройство управления реверсивной клетью кварто | 1981 |
|
SU1024132A1 |
| Устройство форсирования возбуждения синхронного двигателя | 1970 |
|
SU538469A1 |
| Способ регулирования скорости прокатных валков клети кварто в переходных режимах | 1981 |
|
SU1045967A1 |
| Способ уменьшения ударов в кинематической линии клети прокатного стана и устройство для его осуществления | 1980 |
|
SU933146A1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ БУКСОВАНИЯ ВАЛКОВ КЛЕТИ КВАРТО ЛИСТОПРОКАТНОГО СТАНА | 2022 |
|
RU2808119C1 |
| Устройство форсирования возбуждения синхронного двигателя | 1980 |
|
SU877772A2 |
| Способ управления нажимными винтами прокатного стана | 1977 |
|
SU719726A1 |
| Устройство для автоматического контроля буксования валков обжимного прокатного стана | 1977 |
|
SU733752A1 |
utu
ut-0
utc
&tg
йпе
1
йп
Лп
йп(о)
-п
Фиг t
t
f
Фиг i
