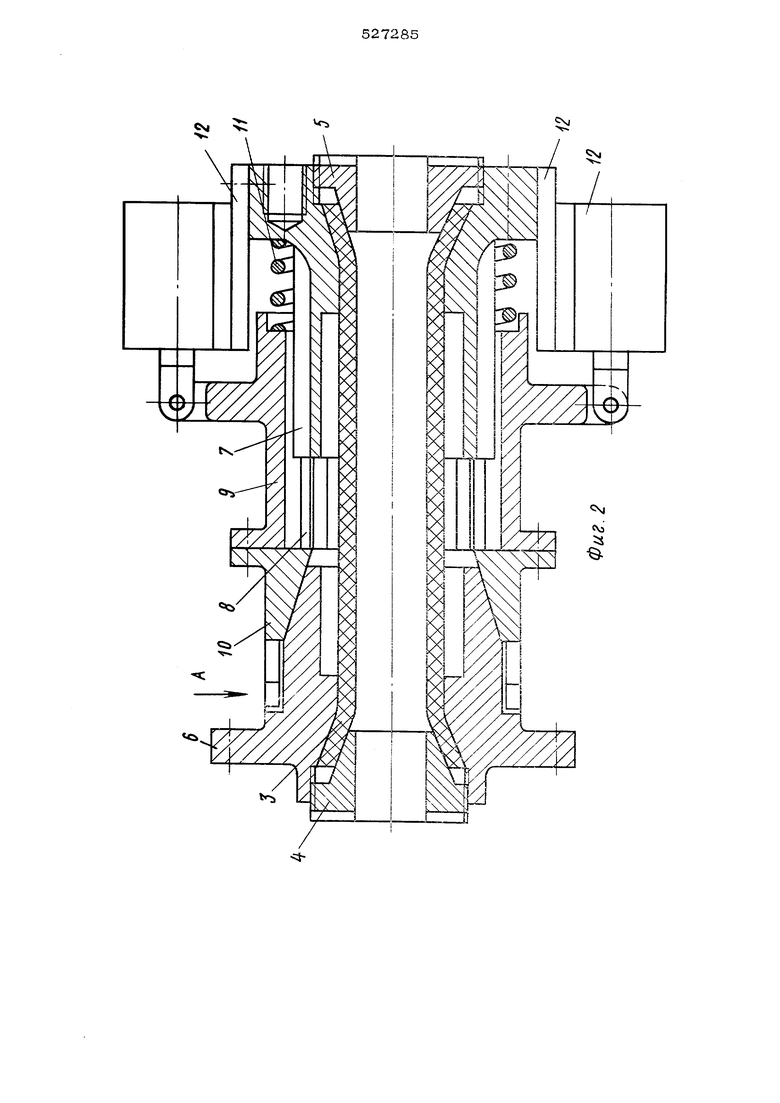
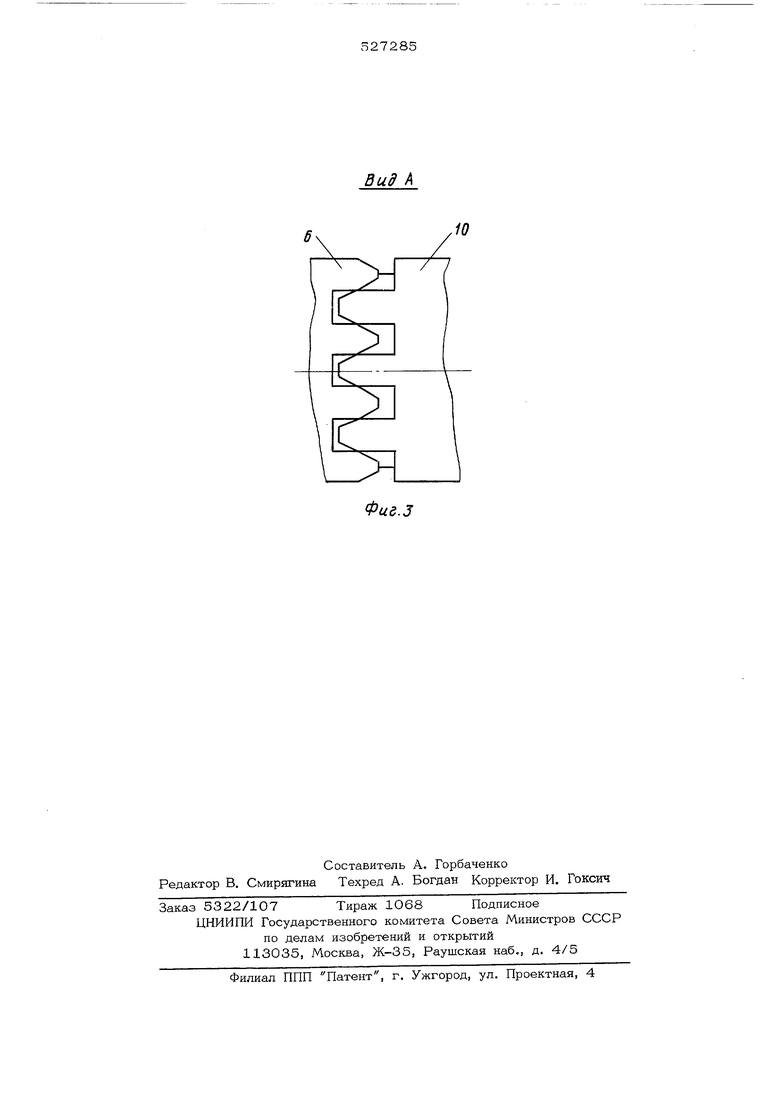
При необходимости изменить жесткость плеча робота до величины, определяемой особенностями технологического процесса, на обмотш электромагнитов 12 подается соответствующее напряжение. При этом яко ря электромагнитов втягиваются, воздействуя на механически связанньвй с ними корпус 9 подвижной части 8, которая перемешается вправо, сжимая пружину 11 и вьшодя зубья конического фланца 10 из пазов фланца 6. В таком положении взаимосвязь между составными частями плеча робота, расположенными по обе стороны от устройства 2, поддерживается только с помощью податливого элемента 3, который воспринимает разрушающие механические нагрузки, передаваемые от технологического оборудования через объект манипулирования на конструкцию робота, и гасит их. Когда необходимо восстановить исходную жесткость плеча робота, напряжение с обмоток якорей электромагнитов 12 снимается, и подвижная часть 8 муфты перемешается под действием пружины 11 влево до сопряжения конических поверхностей фланцев 6 и 10 с образованием зацепления между соответствующими зубьями и пазами ормула изобретения Промышленный робот, содержащий схват плечо с податливым элементом, основание и соответствующие приводы их перемещения по различным координатам, отличающийся тем, что, с целью умень шения разрушающего воздействия механических нагрузок, передаваемых от технологического оборудования, соосно с плечом робота на участке, прилегающем к схвату, установлено устройство для изменения жесткости его плеча при манипулировании объектами, вьшолненное в виде двух фланцев, связанных между собой податливым элементом и конической муфтой, переключаемой по электрическому сигналу с помощью электромагнитов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| Очувствленное запястье руки робота | 1985 |
|
SU1355486A1 |
| СХВАТ РОБОТА | 1991 |
|
RU2022780C1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Самоустанавливающаяся головка робота | 1983 |
|
SU1103980A1 |
| Автоматизированный комплекс для листовой штамповки заготовок с внутренним асимметричным контуром | 1984 |
|
SU1253699A1 |
| Схват робота | 1990 |
|
SU1773716A1 |
| Схват промышленного робота | 1985 |
|
SU1284831A1 |
| Податливый дифференциальный шарнир манипулятора с силомоментным очувствлением | 2021 |
|
RU2803718C2 |
| Очувствленный кистевой сустав робота | 1985 |
|
SU1569233A1 |
ii
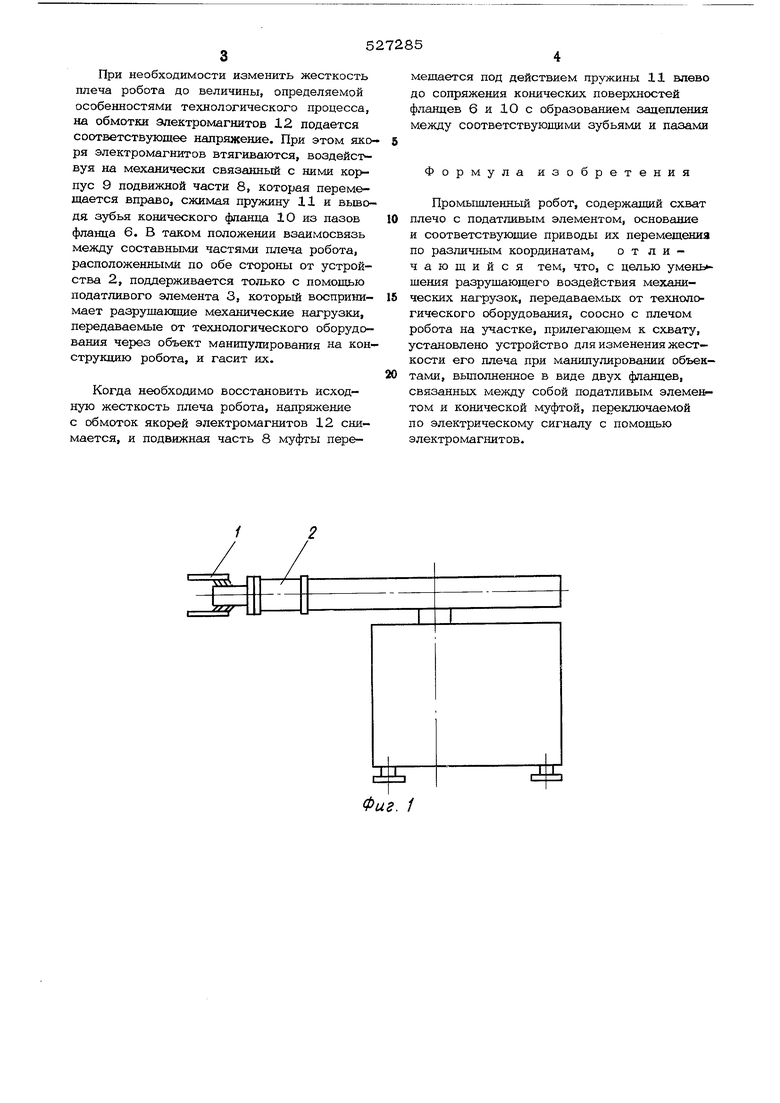
Фиг. 1
Вид /
