1
,, Ийобретеике oiiiooaics к облает; с:та:.)Ко строеипя., а яыеПго,к автоглатичьСгап-. anaii- |ям бееспуктпкоБотч) типа
Иарестаы автоматические кишш бесспу-г- :никоБОге Tiina для обработки загс-товок с CTopouj coflep/Kaiuue устялоБланпые па .отдель}ых иоаии лх поворотлые столы, -кд-гр-, рьш после обработки двух протипоиогюжыых
сторон заготовки поднимают и
EO,ia4iiBa-о.дот вч. на У и OTiioCiiTenfcfio верчпкальнои
|ОСИ для обработки двух других ClOpOIL
I Однако в автоматичес1Шх линьхях поворо-- ныв |столы устанавливают на отдельных noaiijuHsx, разделиющйх лилию на участки, каж|дь1й из которых Hj.,{eeT свой транспортер с нп I диви дуальным приводом, что увеличивает длн|иу пйкии.
Цель изобретений - уменьшение габаритов пикии.I
Это достигается тем, что подъекшО -поБО устройства установлеяы нелосредстBeifflo Б зажим}Ш1Х приспособлениях.; базО |Бые эпамеиты KOTOp ix вьаюллеиы выше наppaiiTviiOiuiix плшюк транспортлого устройст Ifea..
Каждое подъемтю- поворотное устройство , E;,,ireiio В видо иах-илтоВ; закреплешгых ип , в теле которои установлен с воз:..ли;,мюсчью игре:.1е1деиия подпружиненный 5 : г;К|И.лват, cjis6;i.:eiuvbiH гьЛшка-ми, взаимодействуй,илолт; с огран тч11тель1гыми упорами, зак- ;рбппеиным 1 на корпусе Каждого аажик юго
: п;1аОиОСОбуге}Л1Л.
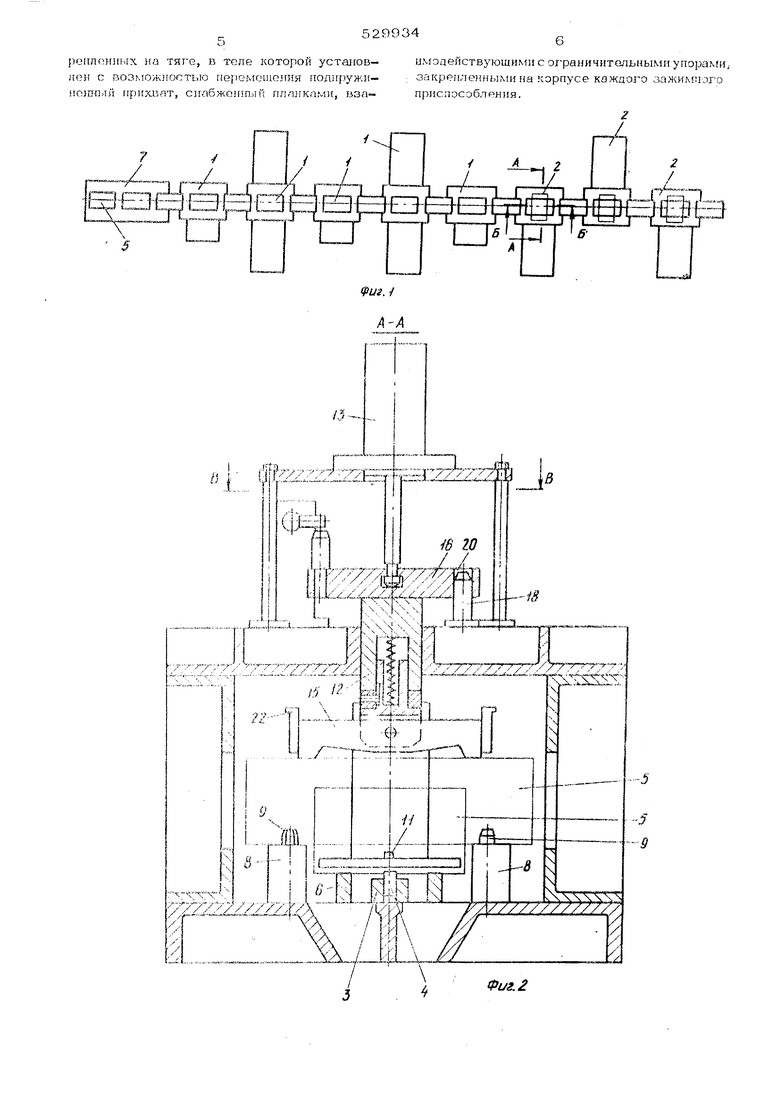
||) 1; На фиг. 1 изображена 1чэедла1аемая a&J
i;io.;aтuчecкaя линия; общий вид в плане; j
jlsia фиг, 2 - разрез по А-А на фиг. Ij на j
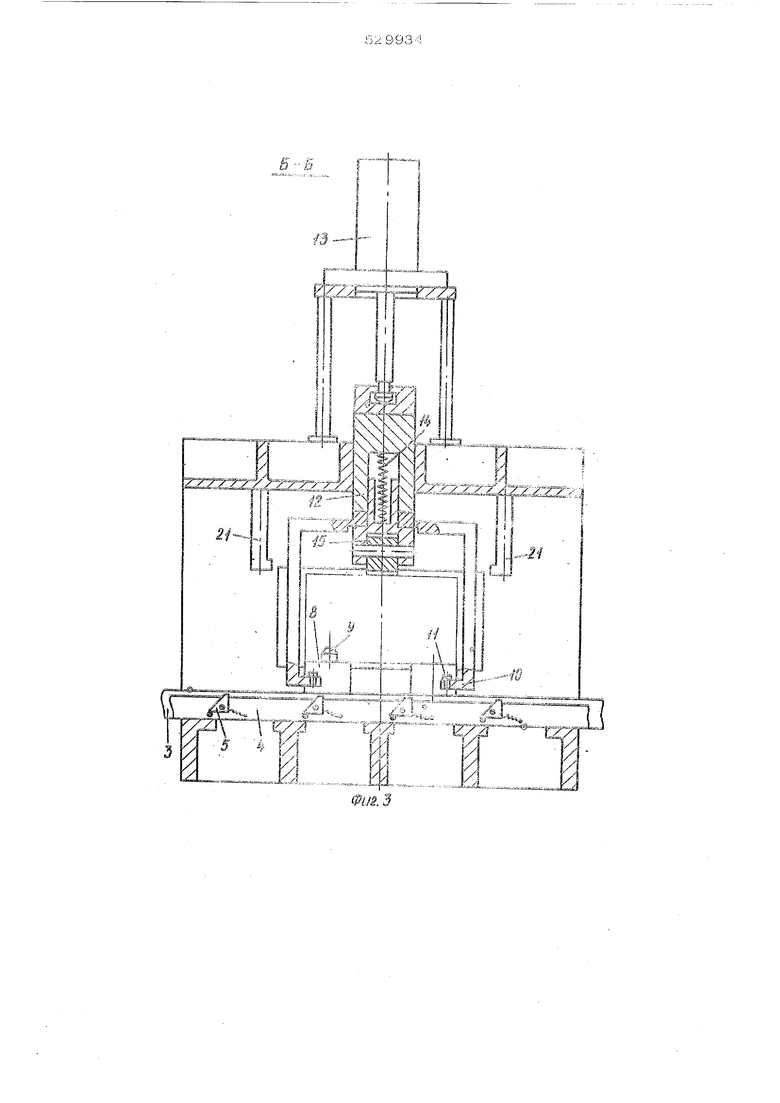
фпг, 3 - разрез по BJ3 на ф№. 1} на фиг.
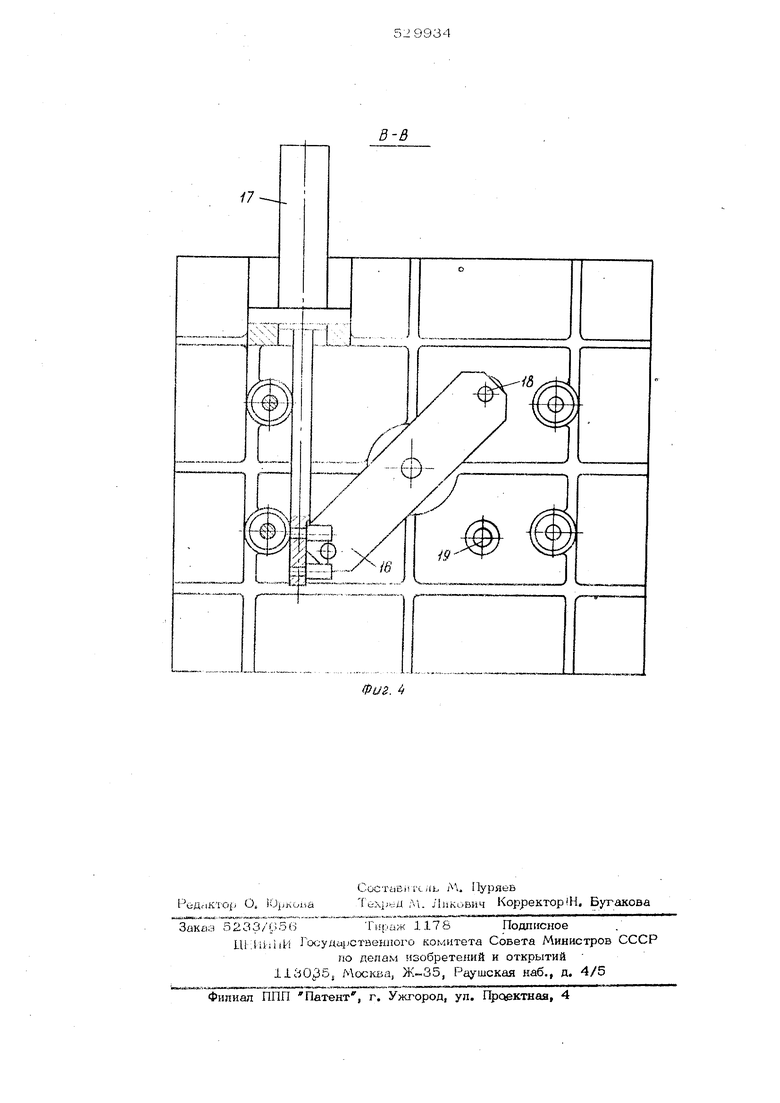
4 «- разрез по В-В на фиг, 2.j
1й Автомат1гческая пиния ссютонт из агрегат-, liibix станков 1, на которых обрабатываются (Стороны заготовок, распопоже1шые нарал- |лельно направлению транспортирования, и агрегатных станков 2, на которых обраба- i
20 тьшаются стороны заготовок, pacHonoKeaijue ;Парепенднкулярпо к направлению транспорти-. рования.
; Транспортное устройство линии состоит из транспортной л,1тангн 3 с подпружиненными
25 spanoDbn.iu собачками 4, перемещающими зшотовкн 5 по iianpa j,iiH OUjHiv; пл- 1.:лм J от nprftio.qa 7, Звжимные приспособле...ия аг-регатыт и:. стшгков 2 снабжены опорами 8 с пеподвкжлымй фикс5дэуюшнмИ :итыря1у И Э для базиро ва1-1Ия .зэготовок во время обработки:. Базе. вая гюверх-ч&х ть опор 8 рсспо.чо ;;спа дыше пан1)авля1О1цих плалок 6 TpajfcnopTiioro устро ства На Kopjijce зажимного прнс11особлони55 кайсдого сталка 2 усталовлено устройство для поворота ЗШ ОТОЕОК 5 выполненное в виде заюзатов 10 с папьиамп 11« Захваты 10 йш-сгко соединены с тягой 12; связал ной с гидроанлиндром 13,. В тяге 12 установлен нлавающий иод действиемпружины 14 пркхват 15J П 1еднпзнйчеш1ый для при}хы1 :а зау отопки к сзллВг:та;.1 1(3 ко но ; за Чч-сбы обесючнгь то;лос.гь угп, та saJCBaroB, гГл корпусе Е;.1.;;а)много npucno соблопия раси&ло ке:иы два фиксатора 18 h .1У, iJ в лОЕОротпом pbPi ie 1Д: 3LiHorme-j но отверстие 20, Во 1ч-Ебе;«г Н5Ю согпзпкссиоьелая загО|-ОБКИ 5 с ;;oAri;jy K;.ijioinr-ii 4 1;р1ихв;:п:.;1.. 15 во время Ti;j,-;;.:Ci.;O jTiii;ic;Ba, ее г::гаиГой в аа -лспмлноо приснособг Рнтш к из него, ка KO;:I.-. ifyce ;1ос} ед}его jfiKijcnnejib о;ра 1),:иите;и-1 ь;е унорь; 21 а на нрихваи ABi-ojvUrjii4ecj:a5i uaiivi образо.;.и На аагрузонипй ii.Uiii задстовха ,як;|;и е jjnaAiiU завч изается на иащ иой -jriiiAiiH j собачкам; 4 i-pajicnopTu меитается с позиц/ ; на ПКЛСНЮООЛ нос чередно в .ii ;iilл p регптных ста/; ;ов J, :;;: ПРИ Г) л е CTOjjei:b 3aro.-o:eoji, пар; нию тра1юнорт;1ровала1.р. постукает в ааукямное ;j из станков 2j saxjiiaTi-i lO г.од ;;,ействием гидроцилиндра 1 3двнжут.; БверХ; нальцы 1 всО содй7 в отверстия ааготов)); Еьп:оиненны но нреяы:дущкх позиция; лпнин, и захваты нодник1а1от заготовку: 5 до yiiopa в noCfirifjy яшп.ешгк-лП прпхлзат Пру; дальнейшем двцжекки . захватов, с зад отовкой нрихват 15 освобождает СЯ от ОГрШЯ1П1ТеЛЬНЫХ 21 и 1ЮДЖ} мается пружиной: 14 к. ;;..аг-о очке 5я Иногда заготовка 5 буде-т; поднята над фн сскруюшкми штырями 9, гидрощзтш-тдр 1 воздействует ка поворотны рычш 16 и захвать Юс аа1отов Юй S близкий к нему Затег-,; од действием гидроцилиндра 13 захваты 10 с поверзгутой заготовкой ол -скаются низ до тех гюр, пока зах отовка не устаовится на базовые поверхлостя онор 8 и нкс1фуюшие штыри 9, Тонность новората захватов 10 обеспечиаегс55 фиксатором 18, которьгй при опускании входит в слверстие 20 новоротного ычага 16„ После усталовки заготовки 5 .на базо вые опоры 8 ,двяжение ее вниз вместе с нрихват-ом 15 нрекрашается, тяга 12, J7po«. должая движение, сжимает пружину 14 и через нрихвот 15 зажимает заготовку 5, Зaфшccиpoвaj нaя lia лты.рях 9 и зажатгш заготовка обрабатываемая. iIi; окончании обработки за аваты 10 под действием гидронипиндра 13 снимают зш-оTOBicy с опор 8 и 1лтырей 9. Гидро:1;11липдр 17 иоЕорачнвает заго1овку в o6paTjjOM нан равлении на тот ;ке утол и неремел1ает ее вн1;з, 1очноств o6parjioro ноцорота зшазатов 10 обеспечиваетсг фиксатором 19, которл,1й нрк онускшгин 16 вкшст-е с ЗсЭхва- тамк 10 входит ь отверстие 2О, В кондо движе:яия заготовки 5 к низу с аготовка о усталсШ 1Цвается на ианраки лсип е нланки 6 в том ;ке лоложеанш к в rojv: же месте, откуда она бьита взята перед обрабеткойс Захваты 10 продолжают де.ижение вниз, а ) .1. J, не вь;ходят .из отверсаИй :ал :;;.л С1|-ОйКу 5 ДЛЯ ТрШЮНОрТИрО-I а 11 3 о б р е т е н и я -1о Автоматическая лнн-1{я для механичес -KOii обработки загчэтовок с разных сторон, содержаидал связаш:1ые транспортным устрой ством стадией с .зажимными приспособлениями и подъемно поворот.ные устройства, о т - п и ч а ю щ а я с 51 теМ; HTO, с целью умел-вшения габаритов пинии, подъемнО-ло а воротные устройства установлены непосред« CTEieiiHo в задсимзгых прнснССобленияХу базо вые элементы которых втлнолнеггы вьпле на н ра1зляюшнх ппаиок тра)снорт)юго устройст-ва. 2, Линия но Не 1;, о т л и ч а ю щ а .я с я теМэ чт-о каждое подъвь.ето - ловорютаое устройство,выполнене в виде Ьахватов, закоо
рецпонлых на тяге, в тепе которой устшюв-имодействующими с ограничительными упорамИ;
пен с возможлостыо персч-.теишния г1од1Г{)ужи-закрепленными на корпусе каждого зажилпюго
иеюп.п прнхипт, сиобже.пшгй пла;-гкамн, вза-приспособления.
р-/™, р
.с1Э41г:тг±Г{ .гггп. tzS
l™™i, ii«ti-a«a,J laciijrj.-«LnJ Jcro-/««pJ
..;1,.,:„щог«ьияв -i™
529934
Фи. 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия | 1985 |
|
SU1355455A1 |
| АВТООПЕРАТОР | 1971 |
|
SU305035A1 |
| Приспособление к горизонтально-ковочной машине | 1946 |
|
SU102604A1 |
| Установка для сборки | 1983 |
|
SU1247216A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| Комбинированный многошпиндельный станок | 1974 |
|
SU511209A1 |
| Автоматическая линия | 1989 |
|
SU1705029A1 |
| Устройство для изготовления деталей из пруткового материала | 1986 |
|
SU1395407A1 |
| Автоматическая линия для изготовления полуосей | 1974 |
|
SU547276A1 |
| Устройство для ротационного выдавливания | 1971 |
|
SU441071A1 |